虚拟现实
RoboDK支持虚拟现实(VR)来模拟您的RoboDK模拟体验。
选择连接➔连接VR耳机(Shift+V)开始虚拟现实体验。

然后你会看到一个显示VR视图的额外窗口,VR耳机应该会自动开始显示你的RoboDK细胞。
RoboDK提供了一组默认的控制器动作(控制器绑定)。
·传送:选择右手控制器的向上箭头键。
·点:轻轻握住扳机,可以看到指针。
·触发:将扳机指向一个机器人,拉动扳机,启动与该机器人相连的第一个程序。
·显示/隐藏坐标系统:选择右手控制器的向下箭头键来显示或隐藏坐标系统。
·抓住并移动你的位置:按住一个控制器的抓取按钮(一次一个)。
·抓住一个物体或机器人:使坐标系统可见,并通过触发抓取动作抓取对象。
·抓住并移动你的方向:同时按住两个控制器的抓取按钮并旋转,就好像你抓住了车站一样。
控制器设置可以在SteamVR的controller bindings菜单中进行配置:
1.选择设置在SteamVR
2.选择控制器
3.选择管理控制器绑定
4.选择RoboDK
5.选择自定义
如果您有一个大的或复杂的单元(例如,如果您有很多对象或复杂的几何),您可能会遇到低帧率。如果您获得低帧率,我们建议您遵循以下一个或多个步骤来改进它。
建议在帧率为40 FPS或更高的站点上使用VR。按照本节中描述的步骤进行操作显示性能节来提高你的帧率。
此外,以下提示将帮助您在使用VR时提高RoboDK模拟的显示性能:
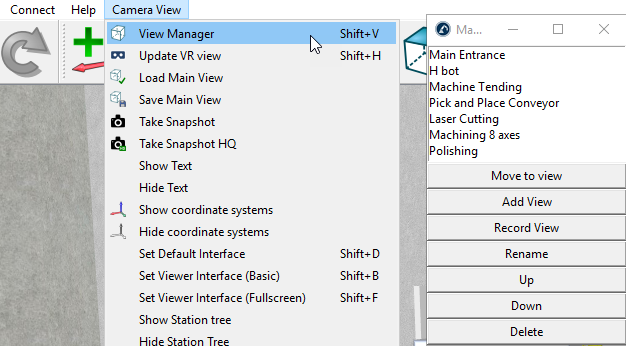
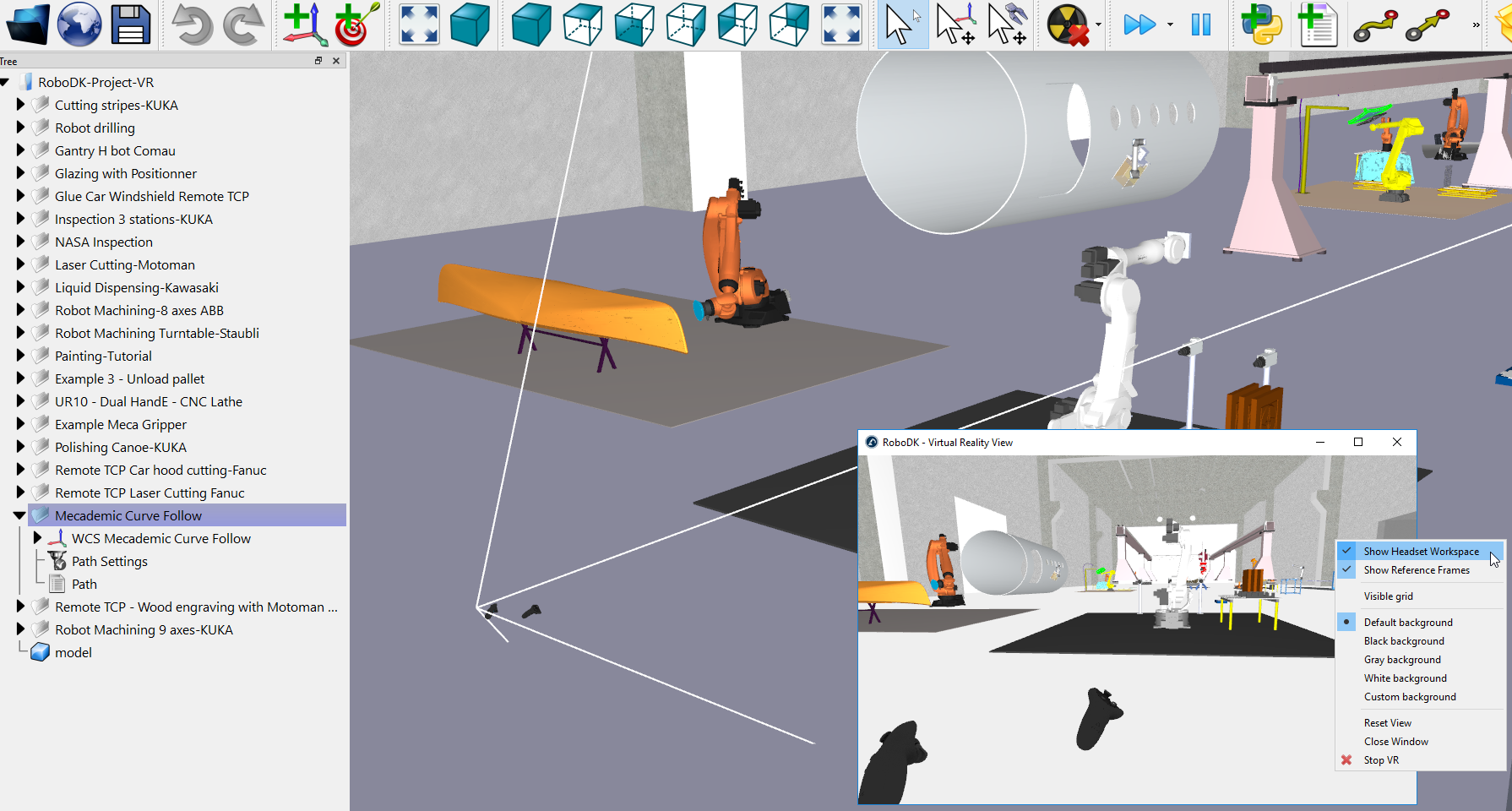
·隐藏耳机工作区:右键单击虚拟现实视图并取消选中显示耳机工作区。这将阻止渲染主窗口。
·最小化虚拟现实视图窗口:这将阻止渲染VR视图和显卡的性能将更好地用于VR头显。
以下提示将帮助您提高虚拟现实体验的质量:
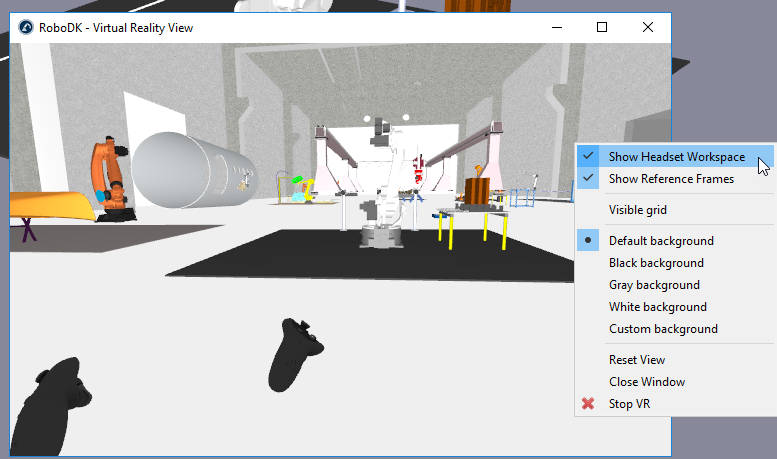
你可以通过提高每只眼睛的分辨率来提高图像的质量:
1.选择设置在SteamVR
2.选择视频
3.选择增加每只眼睛的分辨率达到200%
RoboDK包括一个记录和管理视图位置的应用程序。您还可以将VR中的视图移动到当前设置在主窗口中的视图。