通用的机器人
使用RoboDK编程Universal Robots (UR)可以使用两种不同的方法:URP文件和Script文件。
1.图形用户界面(URP文件):URP程序是使用机器人的教学挂件的触摸屏创建的。一个URP程序可以有一个或多个SCRIPT文件作为子程序。URP程序在执行之前在机器人控制器的后台被转换成SCRIPT程序。
2.脚本文件:脚本程序使用UR Script编程语言。像任何其他编程语言一样,UR脚本有变量、类型、控制语句流、函数等。此外,UR Script有几个内置变量和函数来控制机器人的I/O和运动。
使用RoboDK,您可以生成可由UR机器人执行的脚本和URP文件。此外,有可能在机器人上执行程序如果机器人连接到计算机,则从RoboDK获取。
RoboDK也可以导入SCRIPT文件到模拟器。这允许您模拟脚本程序,修改它们并重新导出它们。
UR机器人的图形用户界面称为PolyScope(如下图所示)。

机器人的IP需要直接从RoboDK模拟器执行程序。也可以通过FTP传输程序文件。
机器人的IP可以从关于菜单中的教学挂件主屏幕。

机器人必须通过以太网连接(直接连接或通过网络)与计算机相连。Ping测试可以测试网络链路是否正确建立。
机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间您可以直接在机器人上运行RoboDK的模拟(在线编程)。更多信息请参见机器人司机部分。
按照以下步骤连接RoboDK的机器人:
1.右键单击RoboDK中的机器人
2.选择:![]() 连接到机器人…
连接到机器人…
3.输入机器人的IP
4.选择连接。
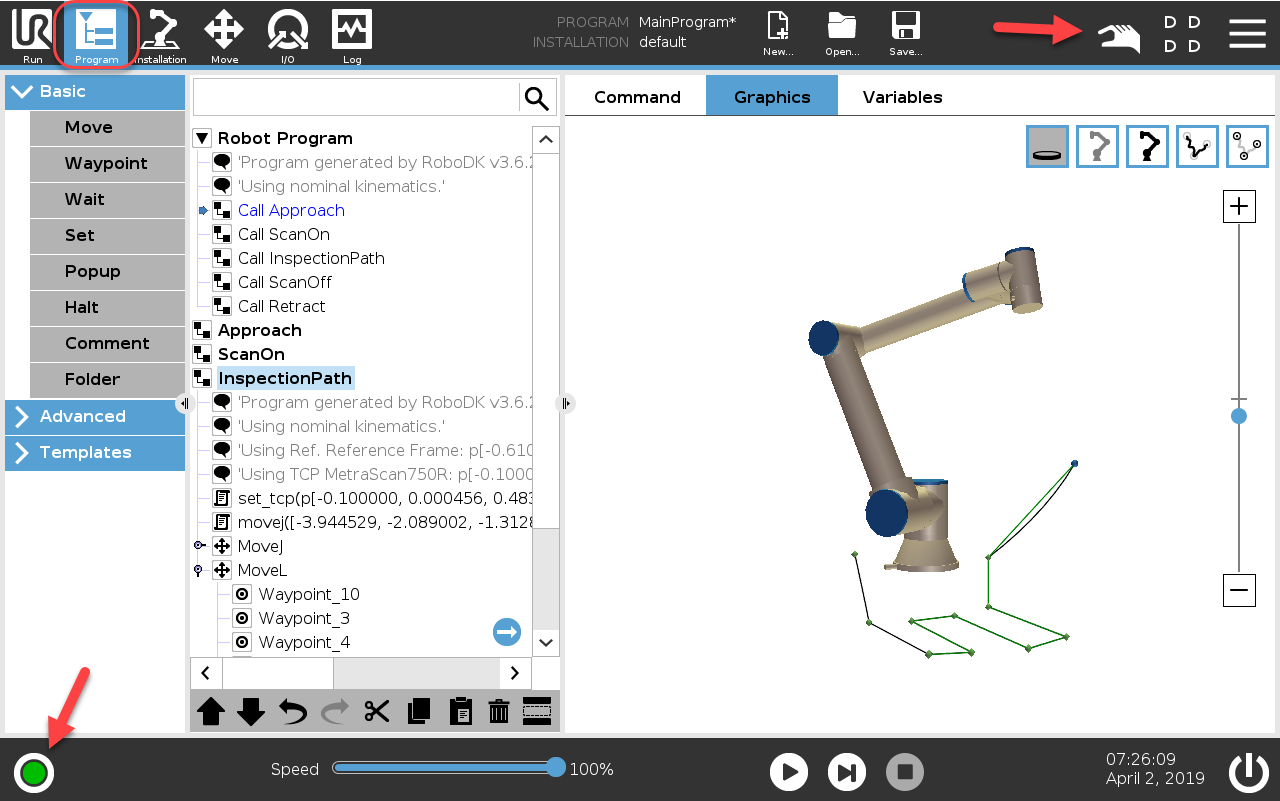
应该有绿色的信息显示准备好了如果连接成功。
机器人可以通过选择来移动获得机器人关节,移动关节和线性移动,从连接菜单中。

从PC到机器人运行程序有两种不同的方法:
1.在机器人上运行一步一步的反馈在RoboDK(在线编程):
该方法将机器人作为服务器,每条指令在模拟器中执行时一步一步地发送给机器人。这个方法对于调试很有用。
一个。右键单击程序(本例中为Print3D)
b。选择在机器人上运行
c。双击程序以启动它(或右键单击并选择运行)
一旦这个选项被选中,它将连接到真正的机器人每次我们双击一个程序(或右键单击,然后选择)运行)
控件中也可以获得这些操作RoboDK API它还允许将机器人编程与其他应用程序集成。该API支持Python、c#和其他编程语言。
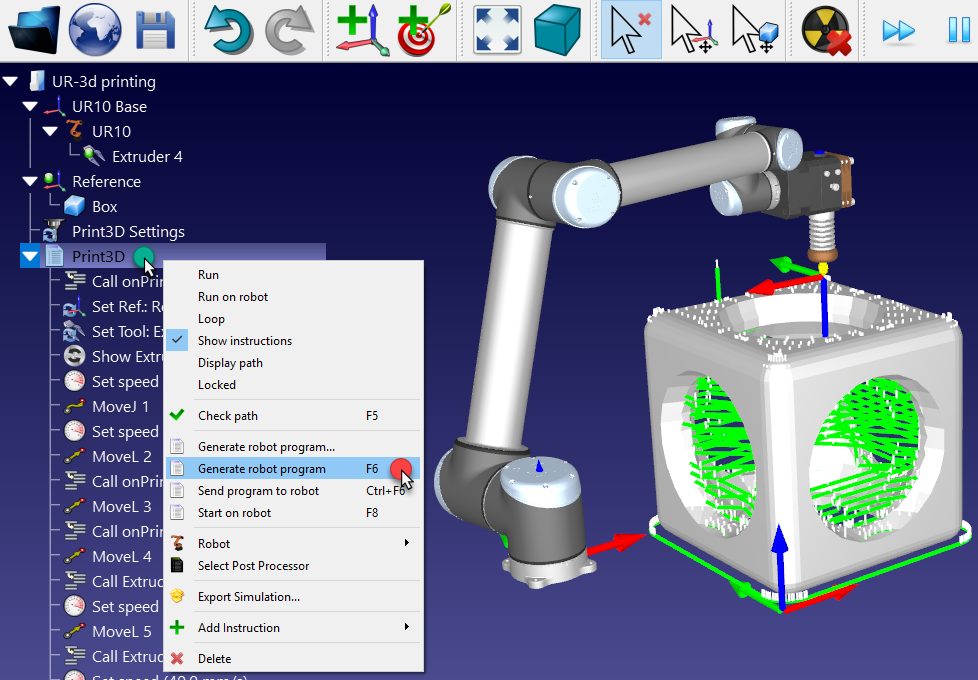
2.向机器人发送程序生成完整的程序,传递给机器人,并在真正的机器人上启动程序(机器人离线编程):2022世界杯8强赛时间
一个。右键单击程序(本例中为Print3D)
b。选择发送程序给机器人(Ctrl+F6)。
您应该启用远程控制如果您有一个UR机器人(UR3e, UR5e或UR10e),请在UR机器人控制器上选择。
按照以下步骤启用URe的远程控制:
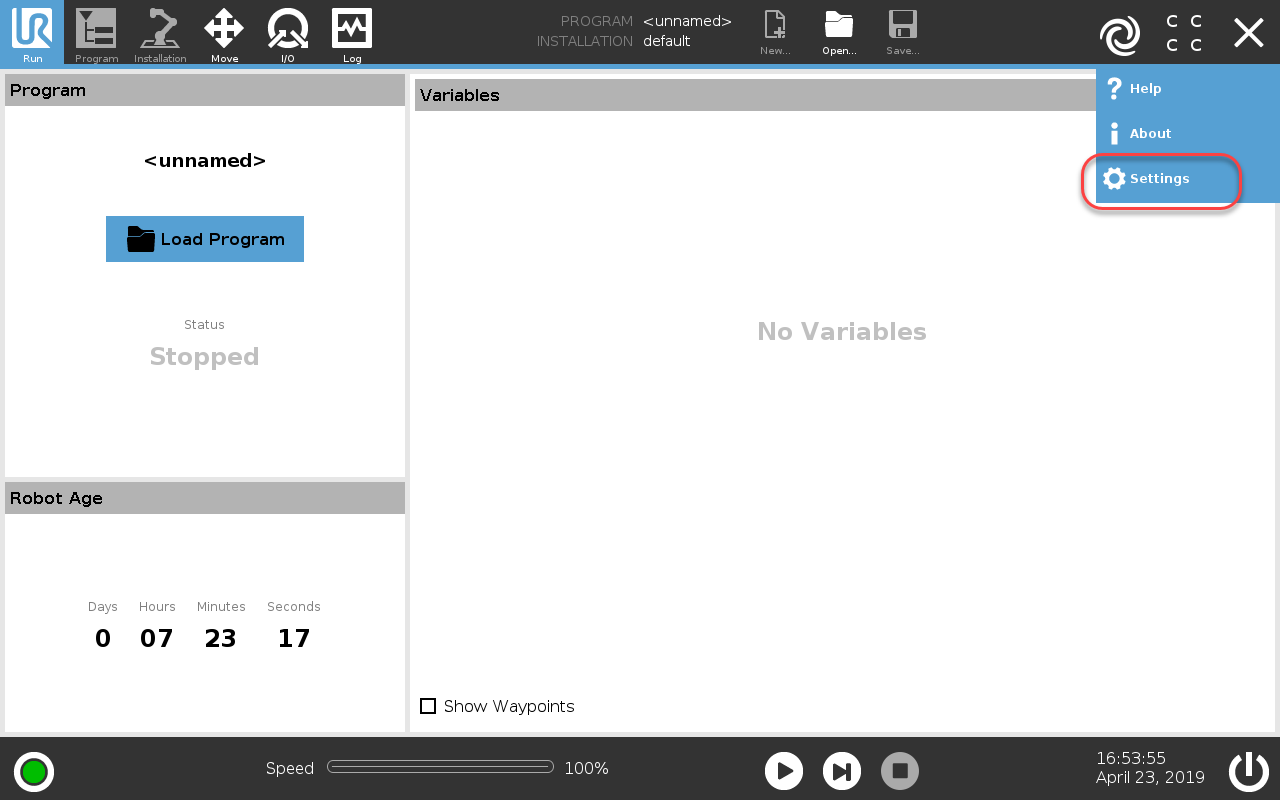
1.选择设置菜单从右上方按钮
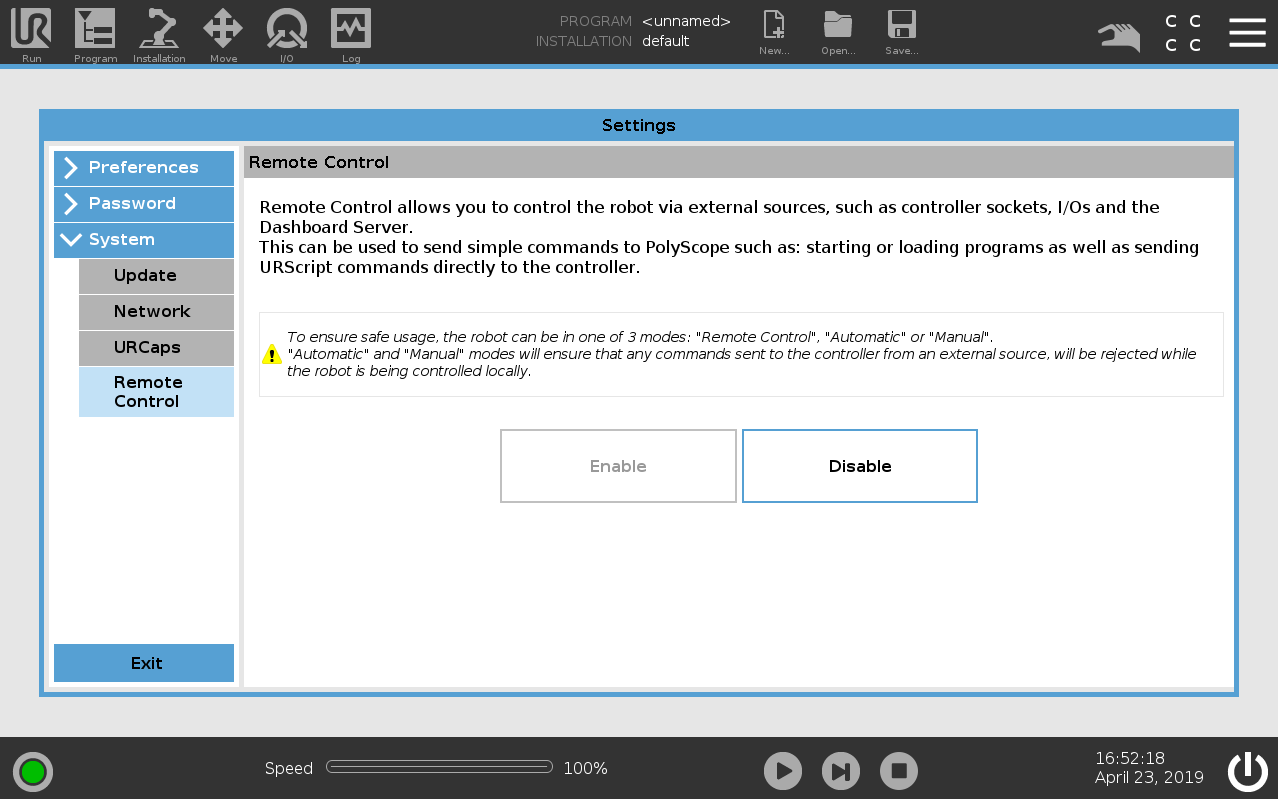
2.选择系统远程控制
3.选择启用
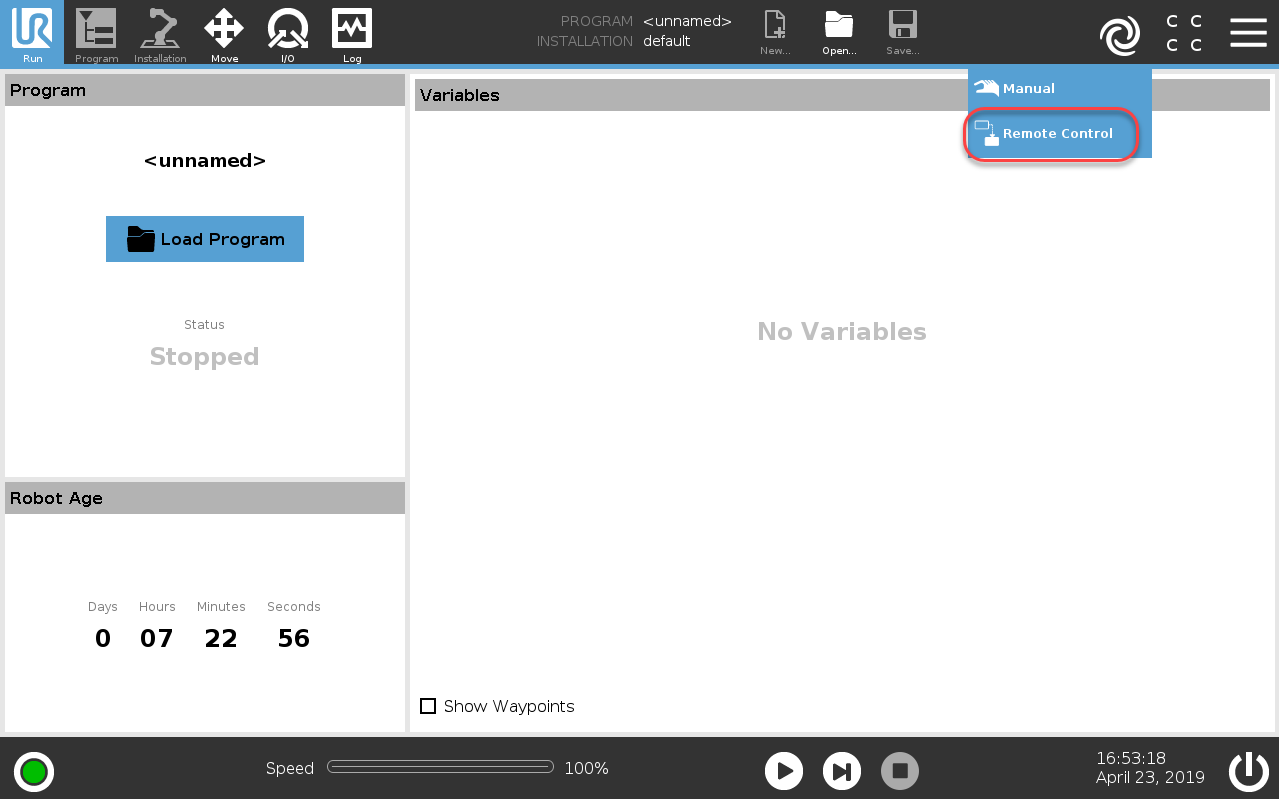
4.将操作模式更改为远程控制
库中有一个宏,允许您监视UR机器人的状态并更新RoboDK中真实机器人的位置。
1.选择文件➔开放
2.加载宏UR_ActivateMonitoring.py来自:C: / RoboDK /图书馆/宏/。我们将在站点中添加一个新的Python对象。
3.确保在机器人连接参数中正确提供了机器人的IP。
4.双击宏以开始监视。
模拟器将更新机器人的位置,并在真正的机器人移动时创建目标。除此之外,它还可以监控机器人的速度、加速度和电机电流。
一旦你的RoboDK模拟准备好了,你就可以生成一个SCRIPT和/或一个URP程序。机器人控制器可以执行这两个文件。按照下面的步骤从你的机器人模拟中生成一个脚本和一个URP程序:
1.右键单击程序(本例中为Print3D)
2.选择生成机器人程序F6
该程序将显示在文本编辑器中(此行为可以在菜单中更改:工具➔选项➔程序)。
传输脚本和URP文件可以通过SFTP传输或USB驱动器完成。
以下步骤总结了在Universal Robots机器人上加载url文件的过程。
1.右键单击程序并选择选择后置处理器
2.选择优傲机器人URP
前两个步骤是可选的,因为默认post也会生成一个URP文件,但是,它将允许您生成一个用户可读的URP程序,而不是一个执行脚本文件的URP程序。
3.右键单击程序并选择生成机器人程序(F6)
4.将生成的URP文件保存到u盘。
5.连接u盘到机器人教学挂件(UR的Polyscope)
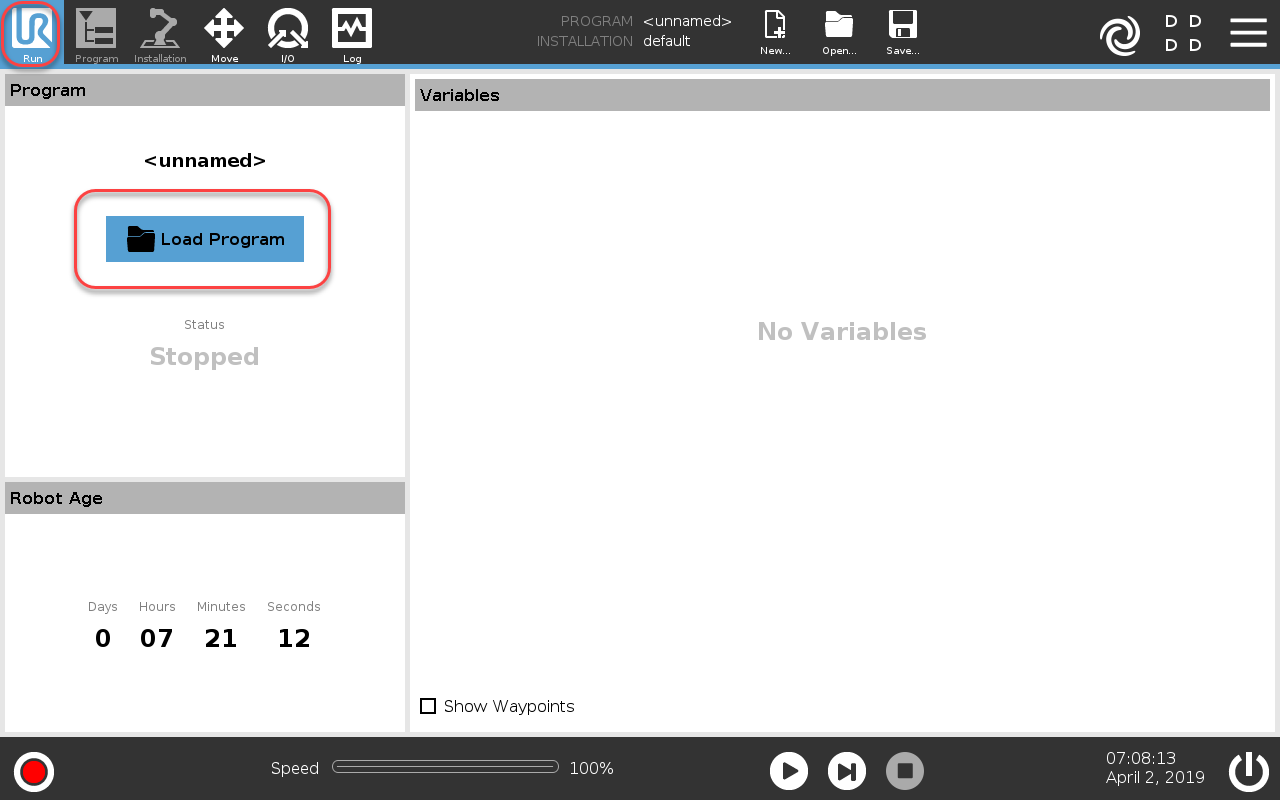
6.在机器人教学挂件上:选择运行选项卡
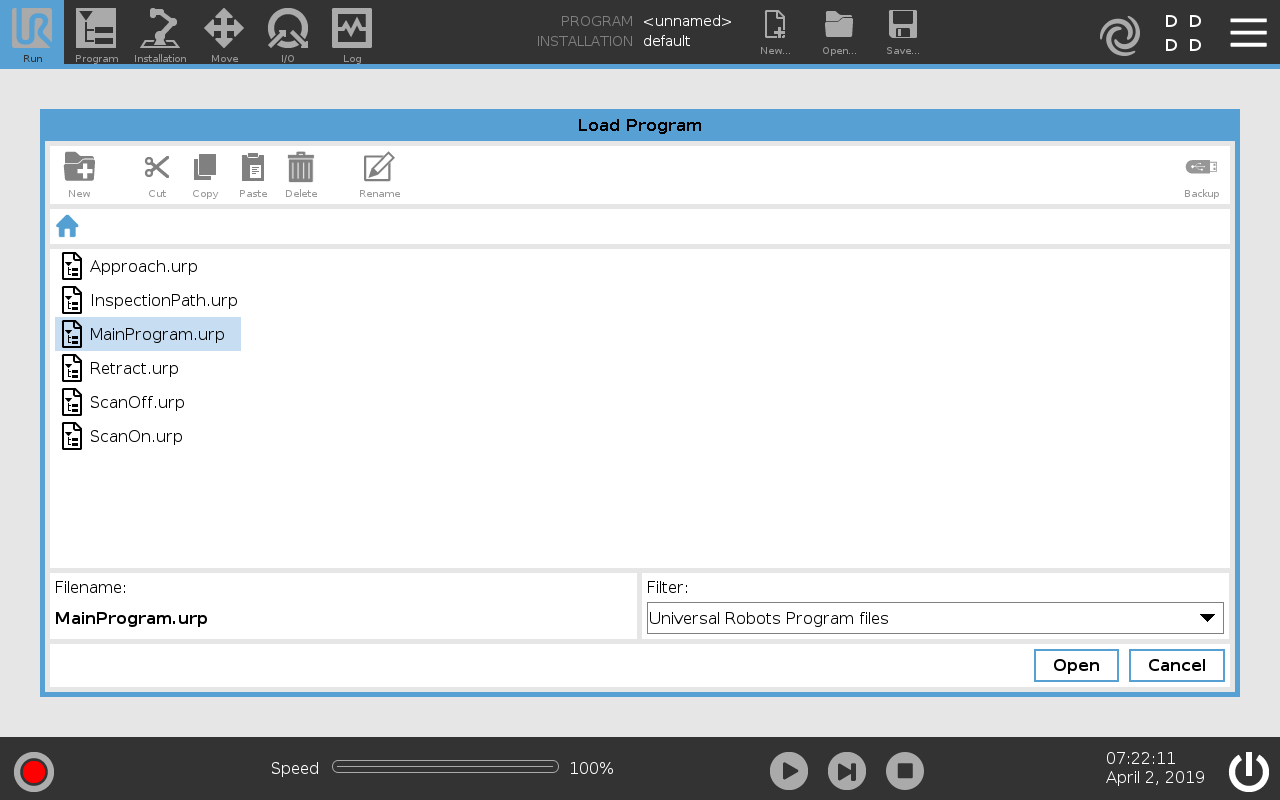
7.选择加载程序加载从RoboDK生成的程序
8.选择Program选项卡,然后选择玩按钮启动它
9.选择播放按钮启动程序。

下面的步骤和图像总结了在机器人上执行脚本程序的过程。运行URP程序文件不需要以下步骤:
1.选择程序的机器人在教学挂件的主屏幕上
2.选择空项目
3.选择结构选项卡
4.选择先进的选项卡
5.选择脚本代码
6.选择文件(如图所示)
7.选择RoboDK生成的脚本文件
8.选择播放图标来运行程序
9.选择文件➔Save保存更改
10.最后,程序可以执行了




RoboDK生成的SCRIPT程序(如按F6)可以通过u盘传输到机器人上,如果机器人和计算机连接,也可以通过FTP传输。
建议安装FileZilla客户在默认路径下或直接在RoboDK安装文件夹中,以便RoboDK自动检测到它:
C:\RoboDK\FileZilla FTP Client\
使用FTP传输文件。
1.右键单击机器人
2.选择连接到机器人…
3.选择探索。打开FileZilla Client (FTP传输软件)。
4.选择文件➔网站管理员……
5.选择通用机器人样本,在预定义的网站。
6.选择重复的。将创建Universal Robot设置的副本。
7.输入机器人的IP地址(本例中为192.168.1.66)。
8.选择连接。
9.将之前生成的脚本文件传输到机器人。
脚本程序通常存储在机器人控制器的/ programs /文件夹中。

本节中的步骤是可选的,仅在离线编程中需要准确性的某些情况下才需要执行。2022世界杯8强赛时间本节解释如何在RoboDK中输入UR机器人的唯一运动学值以准确地模拟机器人。
UR控制器的运动学对每个机器人都是唯一的。运动学是以DH表(Denavit Hartenberg)的形式定义机器人的尺寸。RoboDK模拟器默认使用标称UR运动学,因此,您可能会看到模拟器运动学和控制器运动学之间的2毫米到10毫米差异。
为了使模拟与真实机器人完全匹配,您可以通过简单地打开用teach pendant创建的URP文件来导入您的UR机器人特定的运动学。
您也可以按照以下步骤手动加载url文件:
1.检索使用真实机器人生成的url文件(不使用RoboDK或UR模拟器)
2.在RoboDK中打开你的机器人。您可以在RoboDK库中找到您的UR机器人。您还可以使用您现有的RoboDK工作站中的一个UR机器人。
3.选择工具涉及脚本
4.选择UR_LoadControllerKinematics
5.选择从机器人控制器中提取的url文件。
您应该看到如下图所示的消息。如果没有加载有效的URP文件或没有选择正确的urrobot,则可能会看到警告消息。

当这个过程完成后,您可以右键单击机器人并选择另存为.robot。这些参数与robot文件一起保存,您可以使用robot文件,而不是为每个新项目重复此过程。
RoboDK从URP文件中提取特定于机器人的信息,并将其考虑到机器人文件中的仿真和离线编程。2022世界杯8强赛时间您可以更改此设置并在机器人参数菜单中恢复到默认运动学,如下图所示。

你会注意到,在教学挂件中显示的姿态信息与在RoboDK中显示的运动学相匹配(确保您删除了RoboDK和UR机器人上的工具框架和参考框架以进行比较)。
每个机器人的UR运动学都是不同的,因为每个机器人在工厂都是通过UR进行校准的。其他机器人供应商,如库卡,ABB,摩托曼或发那科不校准他们的机器人,除非你购买所谓的绝对精度选择。绝对精度选项可以考虑多达40个或更多的校准参数。
这个过程和RoboDK的机器人校准。机器人标定有助于提高真实机器人的精度。