发那科机器人
本节文档概述了使用发那科机器人在RoboDK中编写新程序并将其传输到机器人的典型操作。RoboDK支持所有发那科RJ2以来的机器人控制器,包括RJ3, R-30iA和R-30iB。本文档基于R-30iA发那科控制器。
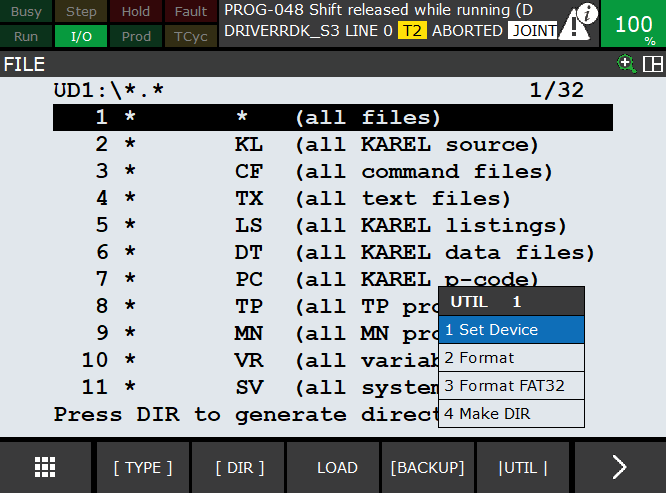
我们必须按照以下步骤从USB驱动器加载程序:
1.把u盘插到教学挂件上
2.选择菜单➔文件
3.选择公用事业公司➔设置设备➔USB
4.选择DIR
5.从u盘(BALLBARTEST)中选择TP或LS程序文件。例如TP)
这将自动将文件保存到FR控制器内存
6.选项中的程序FR记忆并选择LOAD(屏幕按钮)

按照以下步骤启动发那科机器人控制器上的机器人程序。
1.选择FCN(教学挂件按钮)➔中止所有
2.选择选择(教学挂件按钮)
3.选择程序(例如BALLBARTEST)
4.按住“死人”开关
5.选择重置。所有的警报都应该消失。
6.选择并按住转变教学按钮
7.选择前轮驱动(教学挂件上的按钮)
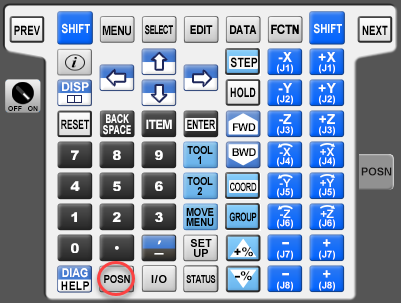
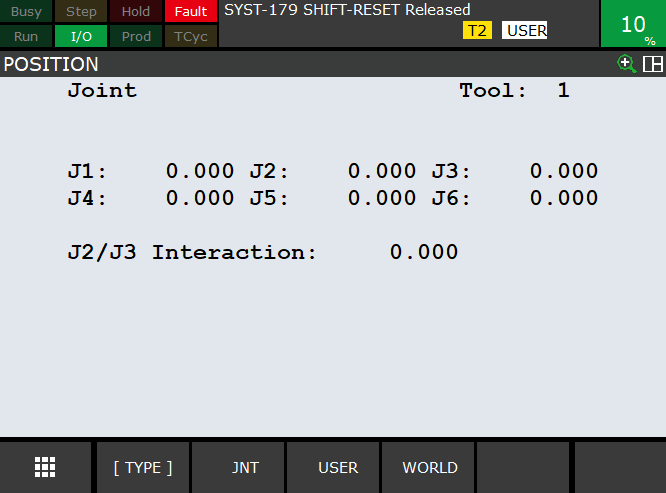
按照发那科教学挂件上的这些步骤来检索您的真实机器人的机器人关节。
1.选择POSN(教学挂件中的按钮)查看当前机器人位置
2.选择JNT在屏幕上或选择COORD(教学挂件中的按钮)来选择连接模式。
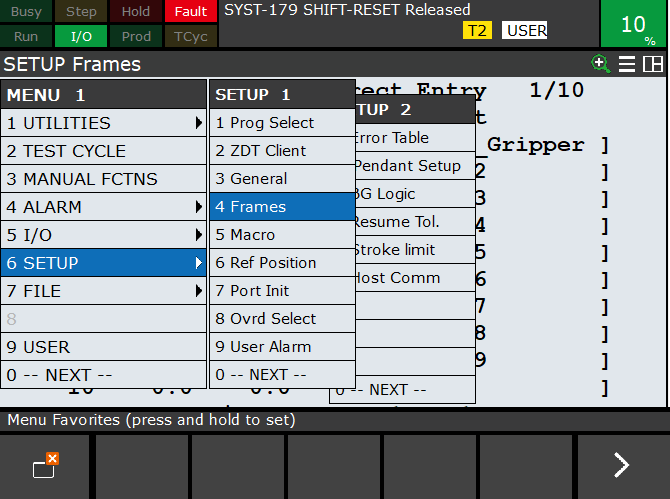
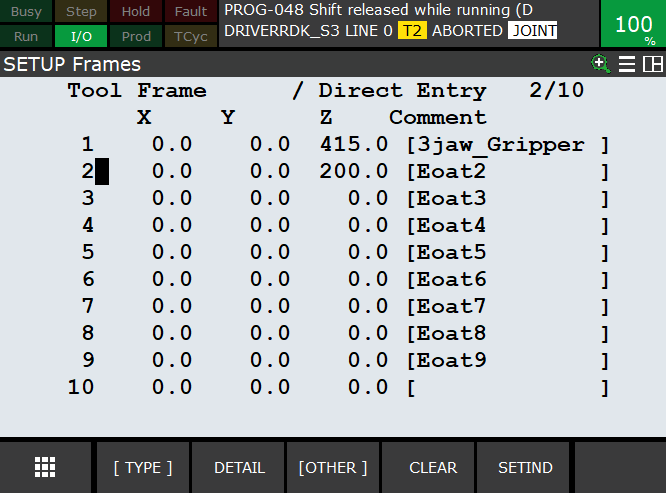
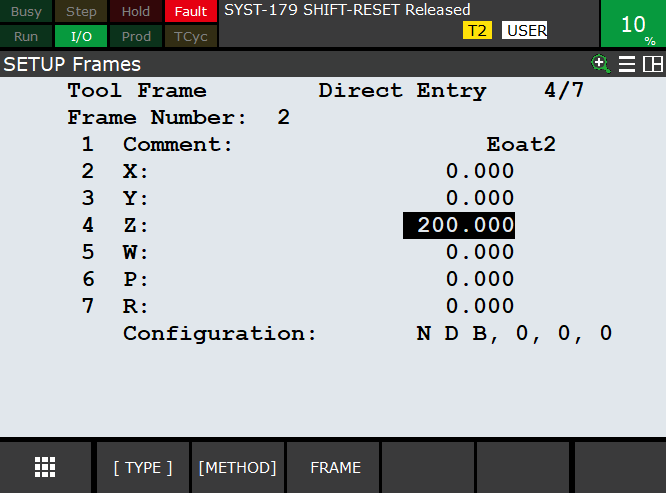
机器人工具作为寄存器存储在发那科控制器(UTOOL)上。这些步骤允许您创建或修改机器人工具(TCP,也称为UTOOL在发那科机器人编程)。
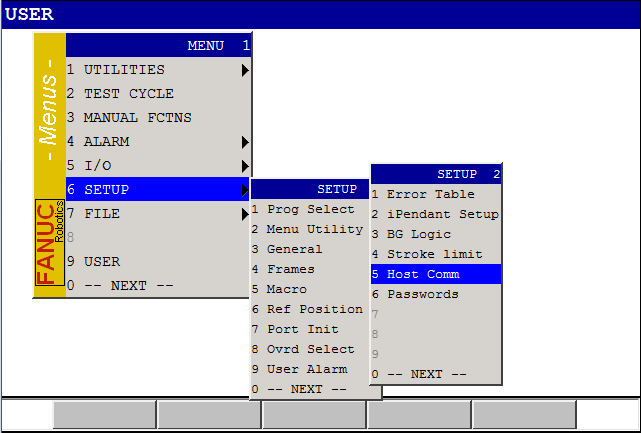
1.选择菜单➔设置➔帧
2.通过箭头或触摸屏选择一个工具,然后选择输入。
3.根据实际情况修改X、Y、Z、W、P、R的值。
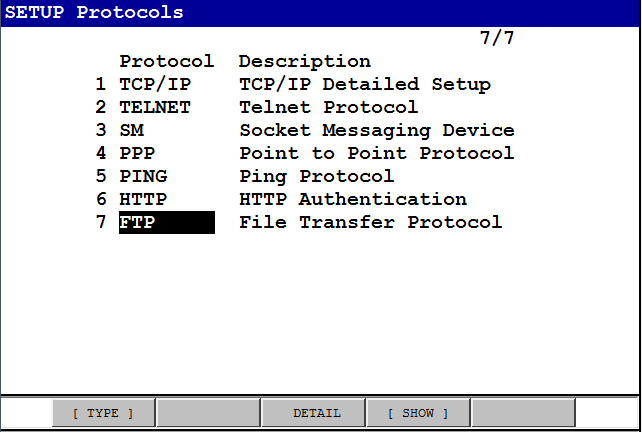
Fanuc的FTP服务器默认在最近的Fanuc控制器上启用。
您可以在菜单中验证FTP凭据:
1.设置➔主机通信
2.选择FTP
如果您看到匿名用户名,您可以通过FTP连接而无需凭据。

机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间使用机器人驱动程序,可以直接在机器人上运行模拟(在线编程)。更多信息请参见机器人司机部分。
RoboDK可以与发那科机器人建立连接,通过RoboDK在连接的PC上自动移动机器人。这允许使用RoboDK在机器人上运行在线编程和调试选项。可以通过标准的以太网连接(TCP/IP)建立连接。
按照以下步骤设置Fanuc的RoboDK驱动程序:
1.2022世界杯国家队名单下载发那科驱动程序文件并将以下机器人程序传递给机器人控制器:
一个。RDK_S3。个人电脑➔这是通过S3(套接字通信端口号3 - S3)管理通信的主要程序。确保选择正确的版本(最新的Fanuc机器人控制器需要使用V9文件夹下的版本)。
b。GO_MJ。TP
c。GO_ML。TP
d。GO_MC。TP
e。GO_PROG。TP
按照以下步骤在机器人教学挂件上准备发那科机器人和RoboDK之间的通信:
1.选择菜单-(下)系统类型变量。
一个。选择HOSTS_CFG美元(按住shift键同时选择向下键可以帮助你更快地向下滚动)
b。选择3号
c。集SERVER_PORT美元到2000年
(美元HOSTS_CFG SERVER_PORT美元[3]= 2000)
2.选择Menu-Setup
3.选择【类型】主机通讯
4.选择[显示]服务器
5.选择“S3”进入。
一个。集协议名称来SM
b。在端口名称,如果有多个端口可用:将“端口”设置为P3(或相应的端口)。
c。设置不活动超时来9999
d。将“启动状态”设置为(选择)开始
e。将当前状态设置为开始:
为此,选择[行动]——把,然后[行动]实体法
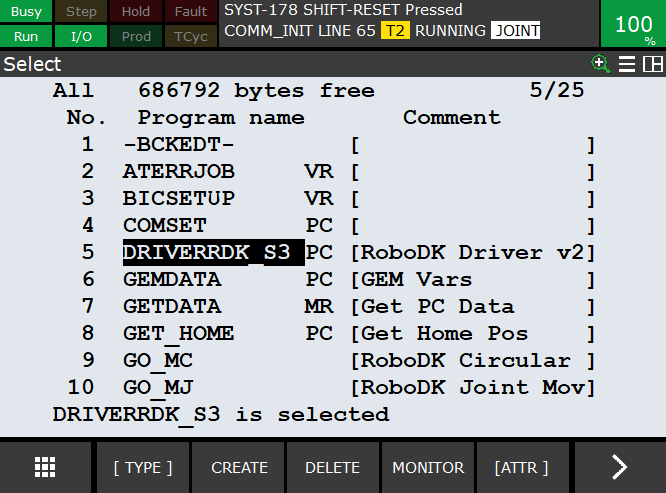
6.启动程序RDK_S3:
一个。选择选择按钮从教学挂件。
b。向下滚动到RDK_S3程序
c。选择Enter(教学挂件上的按钮)
d。选择Shift-Reset和Shift-Forward来启动程序
您应该在教学挂件上看到RUNNING消息。如果程序运行失败,很可能是你没有一个机器人选项(电脑接口或用户套接字消息)或者您没有使用正确版本的PC程序。

7.在RoboDK中输入机器人的IP地址,选择“连接”连接机器人。
介绍发那科LS和TP程序文件的区别,以及如何使用RoboDK为发那科机器人自动编译程序。
在发那科机器人(TP,也称为TPP)上运行机器人程序需要一个二进制文件。发那科机器人使用离线编程软件(如RoboDK)生成的程序为LS格式(ASCII2022世界杯8强赛时间,文本可读,不编译)。将LS机器人程序转换为TP程序有两种选择:
1.有ASCII上传机器人上的软件选项。这个选项可能已经在机器人上可用了。检查这个选项是否可用的最佳方法是向机器人提供一个LS文件,它应该会自动转换为TP文件。例如,将文件放在FR磁盘上,然后选择负载在教学吊坠上。
2.使用Roboguide中的WinOLPC工具编译程序。在这种情况下,安装RoboDK的同一台计算机可以使用发那科的“maketp.exe”编译工具自动编译LS程序。该命令需要一个«robot.ini»文件。此文件可以使用setrobot.exe如果安装了Roboguide并在计算机上保存了工作站,则从WinOLPC下载实用程序("工作单元”)。
如果在默认位置安装了Roboguide WinOLPC工具,则在生成LS程序后,RoboDK会自动执行TP程序。
确保使用setrobot可执行文件选择了一个机器人。如果TP文件没有生成,并且您安装了Roboguide WinOLPC,您可能需要遵循以下步骤:
1.打开windows资源管理器,导航到WinOLPC安装文件夹:
C:\Program Files (x86)\FANUC\WinOLPC\bin
2.右键单击setrobot.exe文件并选择以管理员身份运行
3.选择机器人工作单元(一个机器人指南)WorkCell是必需的)

或者,可以从默认文件夹复制以下文件夹中的内容:
C:\Program Files (x86)\FANUC\WinOLPC\bin
到文件夹:
C: \ \ Fanuc RoboDK \ api
按照以下步骤选择与发那科RJ3控制器兼容的后置处理器:
1.右键单击机器人
2.选择选择后置处理器
3.选择发那科RJ3
4.生成程序(F6)

如果您没有在默认位置安装Roboguide WinOLPC,并且希望在从RoboDK生成程序时自动获取TP文件,请遵循以下步骤:
1.选择程序➔添加/编辑后处理器
2.选择发那科RJ3(或您想使用的后置处理器)。所有的后期处理器也可以通过文件夹:C:/RoboDK/Posts/访问。此外,请确保您没有使用编译后处理器。
3.找到变量PATH_MAKE_TP(在第103行左右),并输入maketp可执行文件所在的路径。
RoboDK后置处理器用于发那科机器人支持使用与外部轴同步的6轴机器人,如转盘或线性轴。
本节介绍如何在使用RoboDK的校准机器人后更新机器人控制器上的运动学参数(DH表)校准和性能包。
修改控制器DH参数会影响该控制器上手动创建的所有程序。保留原始DH参数的副本,以防您想恢复到控制器的出厂设置。
1.在校准窗口中,打开校准参数。
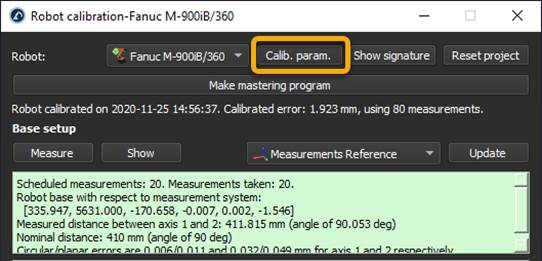
2.选择几何简化。

3.运行校准序列或更新一个已经存在的。

4.检索机器人校准的DH参数。在Robot面板中选择Parameters。然后选择Export Table。


5.一定要使用准确的运动学。的名义上的1可用于与控制器默认DH参数进行比较。
6.使用Danavit Hartenberg修改模型来修改控制器参数。
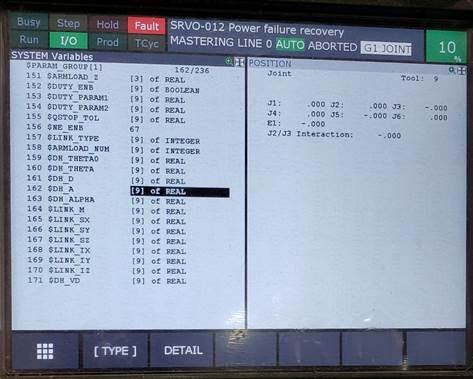
7.在机器人上示教器,打开系统变量->美元PARAM_GROUP [1]。
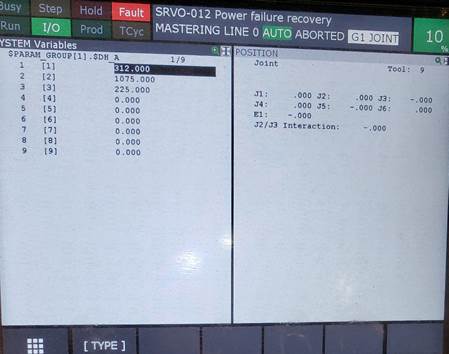
8.找到DH_A美元和DH_D美元参数。
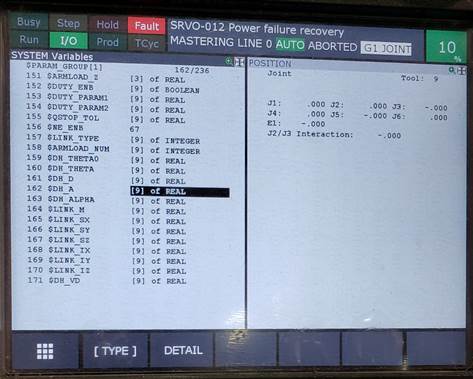
9.修改DH值一个和d的值输出机器人运动学窗口。