日本电装机器人
RoboDK支持电装机器人使用的PAC和PacScript编程语言进行离线编程。2022世界杯8强赛时间只需选择相应的后置处理器,生成机器人程序。
·PAC(RC7及更早版本的控制器)
·PacScript(RC8及更新版本的控制器)
此外,RoboDK还支持RC7和RC8电装控制器的在线编程。这可以使用Denso的默认RoboDK驱动程序。旧版本或新版本也可能得到部分支持。
本文档主要提供有关如何使用电装机器人控制器的在线编程功能的信息。
机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间使用机器人驱动程序,可以直接在机器人上运行模拟(在线编程)。更多信息请参见机器人司机部分。
b-Cap服务器必须启用电装机器人驱动程序(在线编程)。
按照以下步骤在机器人端启用b-Cap服务器:
1.将机器人控制器切换到手动模式。
2.选择选项并输入密码1214,激活ORiN选项
3.允许以太网通信权限:通讯设置菜单-允许集读/写
4.将控制器的可执行令牌设置为以太网在通讯设置菜单。这允许从计算机启动程序。
如果建立了网络连接,机器人程序可以直接从RoboDK执行到真正的机器人。
1.右键单击RoboDK中的机器人
2.选择:![]() 连接到机器人…
连接到机器人…
3.输入机器人的IP
4.选择连接。
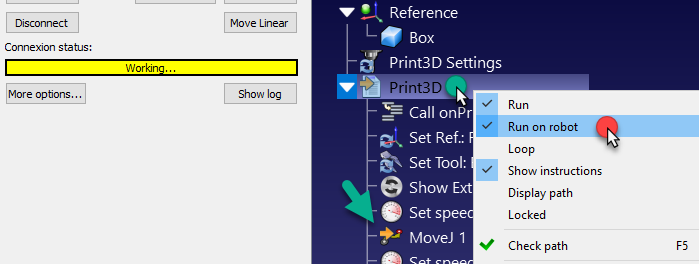
应该有绿色的信息显示准备好了如果连接成功。
机器人可以通过选择来移动获得机器人关节,移动关节和线性移动,从连接菜单中。

使用在机器人上运行选择移动机器人,同时保持反馈在RoboDK(在线编程)。该方法将机器人作为服务器,每条指令在模拟器中执行时一步一步地发送给机器人。这个方法对于调试很有用。
1.右键单击程序(如下图所示的Print3D)
2.选择在机器人上运行
3.双击程序以启动它(或右键单击并选择运行)
一旦这个选项被选中,它将连接到真正的机器人每次我们双击一个程序(或右键单击,然后选择)运行)
控件中也可以获得这些操作RoboDK API它还允许将机器人编程与其他应用程序集成。该API支持Python、c#和其他编程语言。
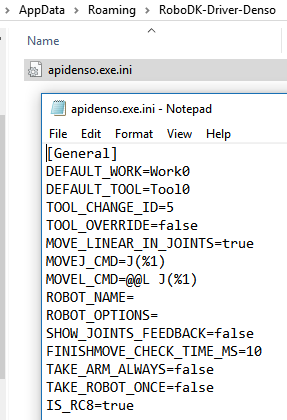
电装的RoboDK驱动程序可以高度定制,以实现特定的行为。此自定义可以通过编辑ini文件位于:
% APPDATA % / RoboDK-Driver-Denso / apidenso.exe.ini
这些定制允许指定运动类型或能够同时驱动多个机器人。任何文本编辑器都可以用来修改这个文件。
可配置的变量如下:
·DEFAULT_WORK -默认使用的工作对象(可变字符串)。
·DEFAULT_TOOL—默认使用的工具变量。
·TOOL_CHANGE_ID -当我们设置一个新工具(例如5=Tool5)时使用的备用工具变量。
·move_linear_in_joint -设置为false以提供线性运动作为笛卡尔目标。
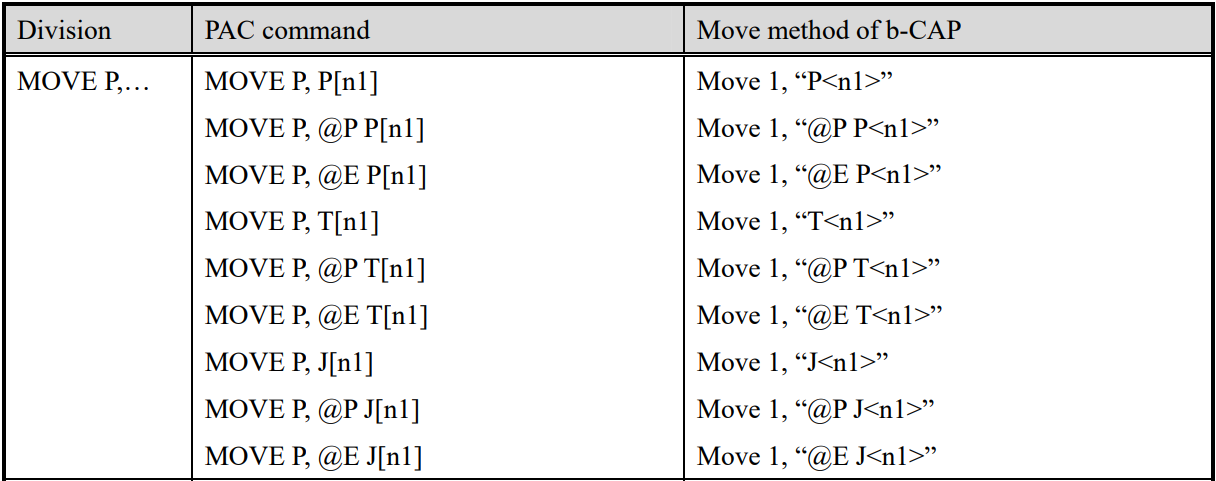
·MOVEJ_CMD -发送一个联合运动(MoveJ)的命令。下表提供了允许的选项。
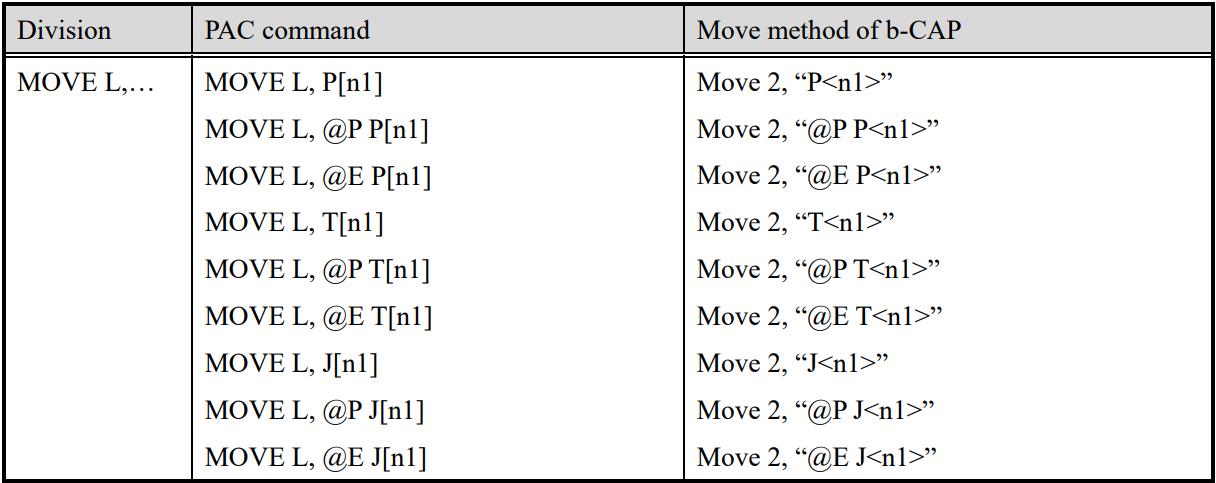
·MOVEL_CMD -发送线性移动(MoveL)的命令。下表提供了允许的选项。
·ROBOT_NAME—机器人的名称。指定此名称可选择控制器的特定机器人
·ROBOT_OPTIONS-机器人选项,以获得机器人资源。例如,如果我们使用的是控制器的从机器人,我们必须指定ROBOT_OPTIONS= " ID=1 "。如果我们想使用主机器人(主机器人),ID必须为0(默认)。
·SHOW_JOINTS_FEEDBACK-设置为true,在屏幕上实时看到机器人反馈(性能可能会变慢)。
·FINISH_MOVE_CHECK_MS-设置在显示关节反馈时,机器人位置在屏幕上刷新的速度。
·TAKE_ARMS_ALWAYS-设置为true,每次运动后保持控制器资源,直到机器人断开连接(更快,但可能导致意外结果)。
·TAKE_ROBOT_ONCE-设置为true,当机器人连接时,每次移动后都保留机器人资源(更快,但可能导致意想不到的结果)。
·IS_RC8-设置为false以正确连接RC7和旧的Denso控制器。