ISO9283性能测试
ISO标准”ISO9283:操纵工业机器人-性能标准和相世界杯2022美洲预选赛直播关测试方法描述了评估工业机器人性能的测试。世界杯2022美洲预选赛直播除此之外,它还提供了适当测量机器人位置精度、可重复性和路径精度的程序。
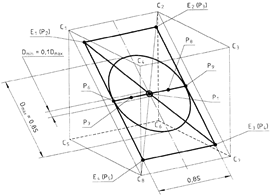
根据ISO9283标准,所有的测试都应该在所谓的ISO测试立方体内进行。ISO测试立方体应该是机器人工作空间中可以容纳的最大立方体。此外,在5种不同配置下测量30次定位精度和可重复性。众所周知,对于现代机器人来说,5种构型不足以提供适当的精度测量。
大多数机器人制造商只有在机器人经过校准后才提供机器人的位置精度,此外,他们使用至少100种不同的配置来提供适当的位置精度统计。世界杯2022美洲预选赛直播工业机器人具有高度可重复性,但精度不高;因此,通过标定可以提高工业机器人的精度。世界杯2022美洲预选赛直播

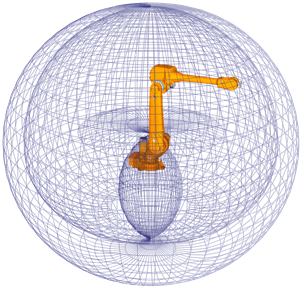
80年代的典型机器人工作空间现代机器人的典型机器人工作空间
然而,ISO9283标准经常用于可重复性和路径精度测试,即使机器人没有被校准。

建议观看以下视频,展示使用RoboDK进行路径精度测试:https://youtu.be/yMQjqAQY1iE.
RoboDK也可以用来校准机器人,以及测试他们的性能前后校准。最后,RoboDK还可以通过球棒测试来测试机器人校准前后的精度。
安装RoboDK并正常进行机器人路径精度测试,需要准备以下项目:
1.一个或多个工业机械臂世界杯2022美洲预选赛直播
2.测量系统:任何激光跟踪仪,如徕卡,API或Faro和光学三坐标测量机,如Creaform的C-Track立体相机都可以工作
3.需要安装RoboDK软件,并且需要相应的license才能进行ISO9283测试。对于网络license,需要使用internet连接来检查license。安装或更新RoboDK以进行ISO9283性能测试:
一个。2022世界杯国家队名单从下载部分下载RoboDK
//www.sinclairbody.com/2022世界杯国家队名单download
b。设置测量系统的驱动程序(Creaform Optical CMM不需要)。
解压缩并复制相应的文件夹:
API激光跟踪仪://www.sinclairbody.com/2022世界杯国家队名单downloads/private/API.zip(OTII和弧度跟踪器)
Faro激光跟踪仪://www.sinclairbody.com/2022世界杯国家队名单downloads/private/Faro.zip(所有Faro追踪器)
徕卡激光跟踪仪://www.sinclairbody.com/2022世界杯国家队名单downloads/private/Leica.zip(所有徕卡跟踪器)
到文件夹:C: / RoboDK / api /
建议在RoboDK中搭建真实安装的虚拟环境(离线安装),为测试准备路径和位置。这可以在安装机器人和跟踪器之前完成,只需使用安装了RoboDK的计算机。RoboDK校准和路径验证设置示例可以从以下文件夹下载:2022世界杯国家队名单
//www.sinclairbody.com/2022世界杯国家队名单downloads/calibration/
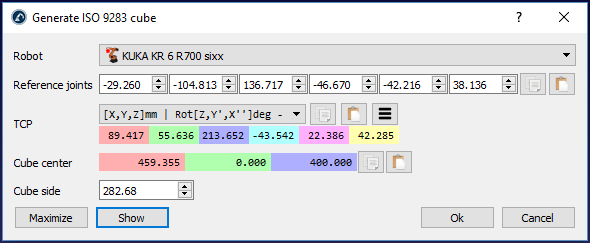
RoboDK有一个实用程序来生成配置和推荐路径,如ISO9283标准所述。要使用此实用程序:
1.公用事业公司➔创建ISO 9283多维数据集(目标和路径)
2.输入参考关节(刀具面对跟踪器的机器人位置)
3.调整立方体的位置和大小
4.选择OK
这将创建ISO规范所描述的5个目标,以及路径精度测试推荐的路径。这些目标和路径保持在机器人前方的立方体内。我们可以设置所需的立方体边,以及移动中心(目标“ISO p1”)和定义路径方向的参考关节。还可以最大化立方体的大小,以找到适合机器人工作空间的最大立方体。
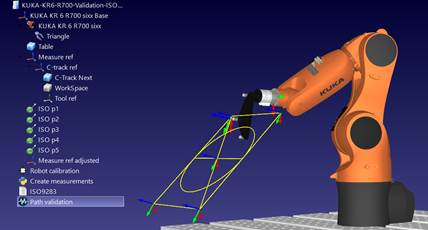
具有机器人校准和机器人验证选项的样站如下图所示。
在机器人校准期间用于位置精度验证的相同程序也可用于位置精度测试。如果通过同一组点依次进行测量,也可以获得重复性统计信息。仅执行验证或校准与验证之间的唯一区别是,第一个选项不需要机器人校准许可。
要执行这样的验证,您应该选择以下菜单:
●公用事业公司➔测试位置精度和可重复性(ISO 9283)
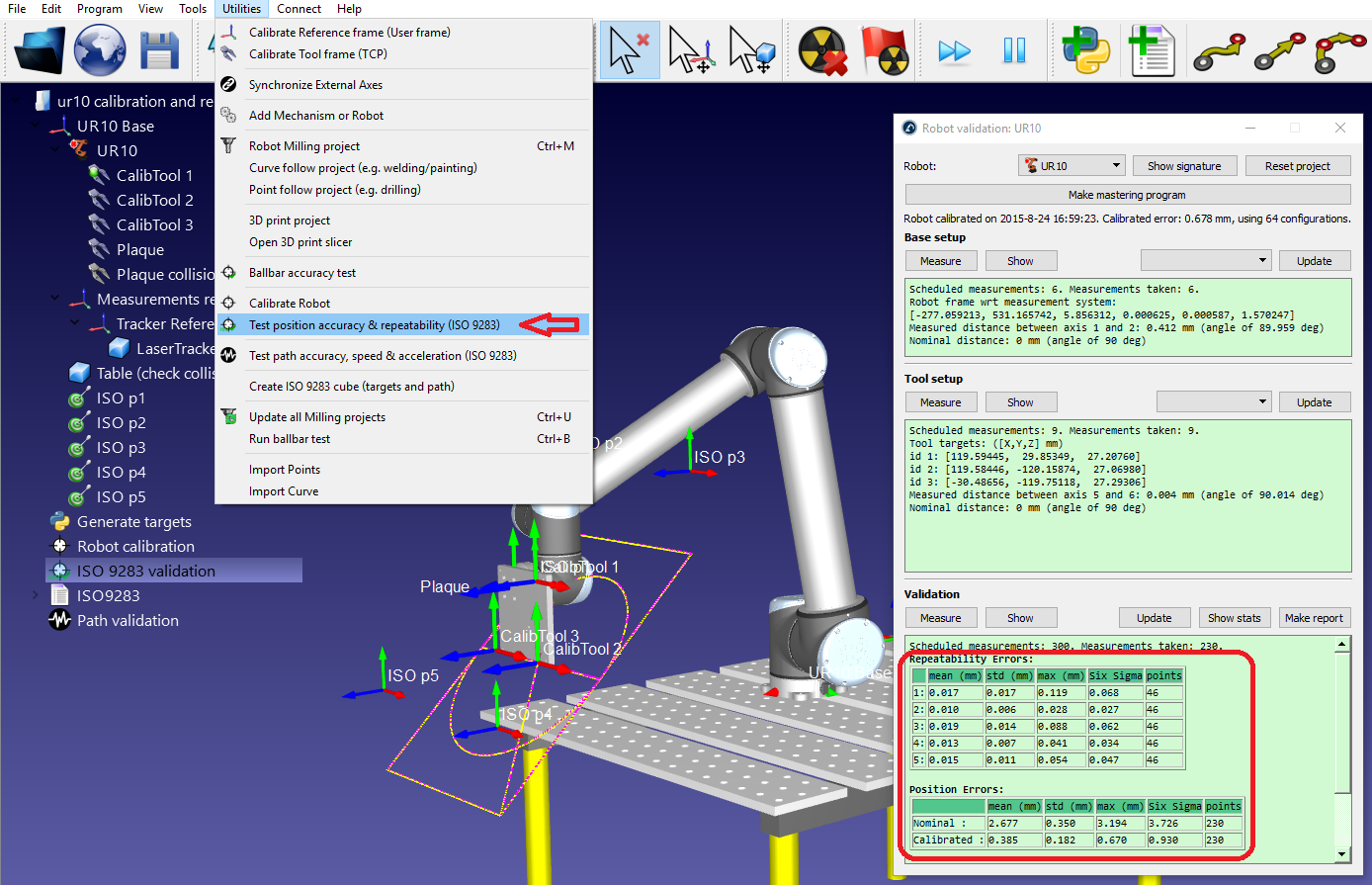
这些测试需要根据测量参考系(基座设置)确定机器人基座框架,也需要根据机器人法兰(工具设置)确定工具框架。
当位置精度和可重复性测试完成后,可以获得PDF报告。
要执行路径准确性测试,需要使用RoboDK创建机器人程序,例如ISO9283由创建ISO多维数据集实用程序.我们可以通过选择程序并按F6(或选择程序➔生成程序)。另外,也可以使用RoboDK中创建的任何其他程序(如直线,圆或正方形)。
它还需要有一个测量系统,可以跟踪末端执行器的位置,并提供相对于参照系的位置测量。需要使用RoboDK中的基础设置和工具设置程序(需要执行校准或位置精度测试)来识别机器人基础框架和工具框架。
测量数据必须在机器人沿着程序移动时获得。测量应使用测量系统制造商提供的默认软件连续记录。需要将测量结果导出为CSV或TXT文件。这些文件必须包含XYZ位置数据以及每个测量的时间戳。可选地,这些测量可以包含刀具相对于机器人基座的方向。
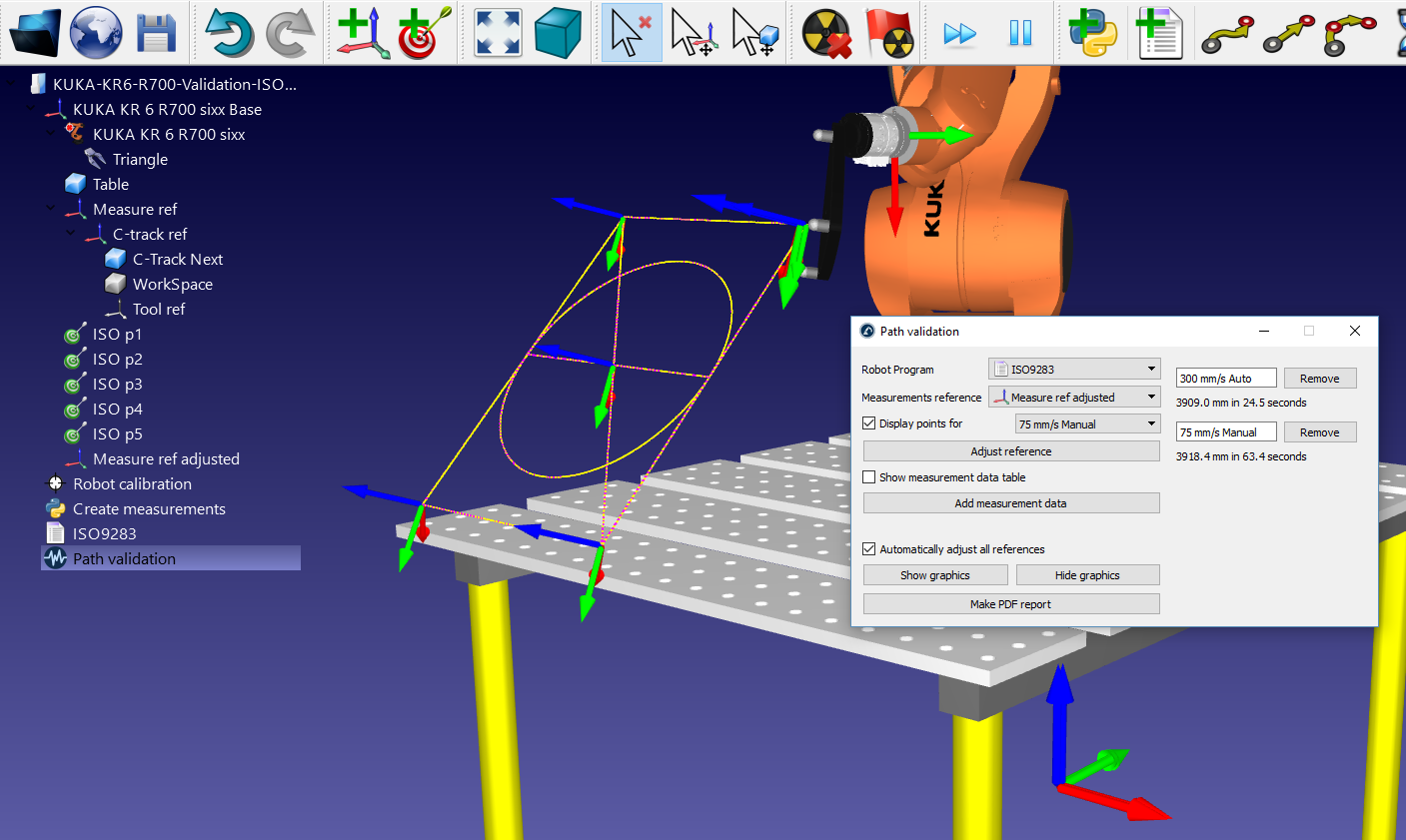
在RoboDK中启动路径验证项目:
1.选择工具➔测试路径精度、速度和加速度(ISO 9283)
2.从下拉菜单中选择用于验证的程序
3.提供用于测量的参考系
4.通过选择导入测量数据添加测量数据.另外,也可以将包含度量的CSV或TXT文件拖放到Path验证窗口。
最后,选择制作PDF报告生成一个PDF,其中包含一些关于路径精度、速度和加速度的统计数据和图形。可以在不同的条件下(不同的速度、不同的舍入/转弯值、不同的有效载荷等)多次运行相同的测试,以便在同一报告中比较这些参数。
测量点可以用紫色显示。这些测量值应该与描述机器人必须遵循的理想路径的黄色路径相匹配。RoboDK提供的统计数据就是这两条路径的差异。
如果参考系没有正确定义,测量点就不匹配黄色路径。发生这种情况的原因有很多,比如参考框架定义不好或者工具定义不同。在本例中,选择调整参考将尝试最好地拟合两条路径,以便所提供的统计数据隔离这些不一致。
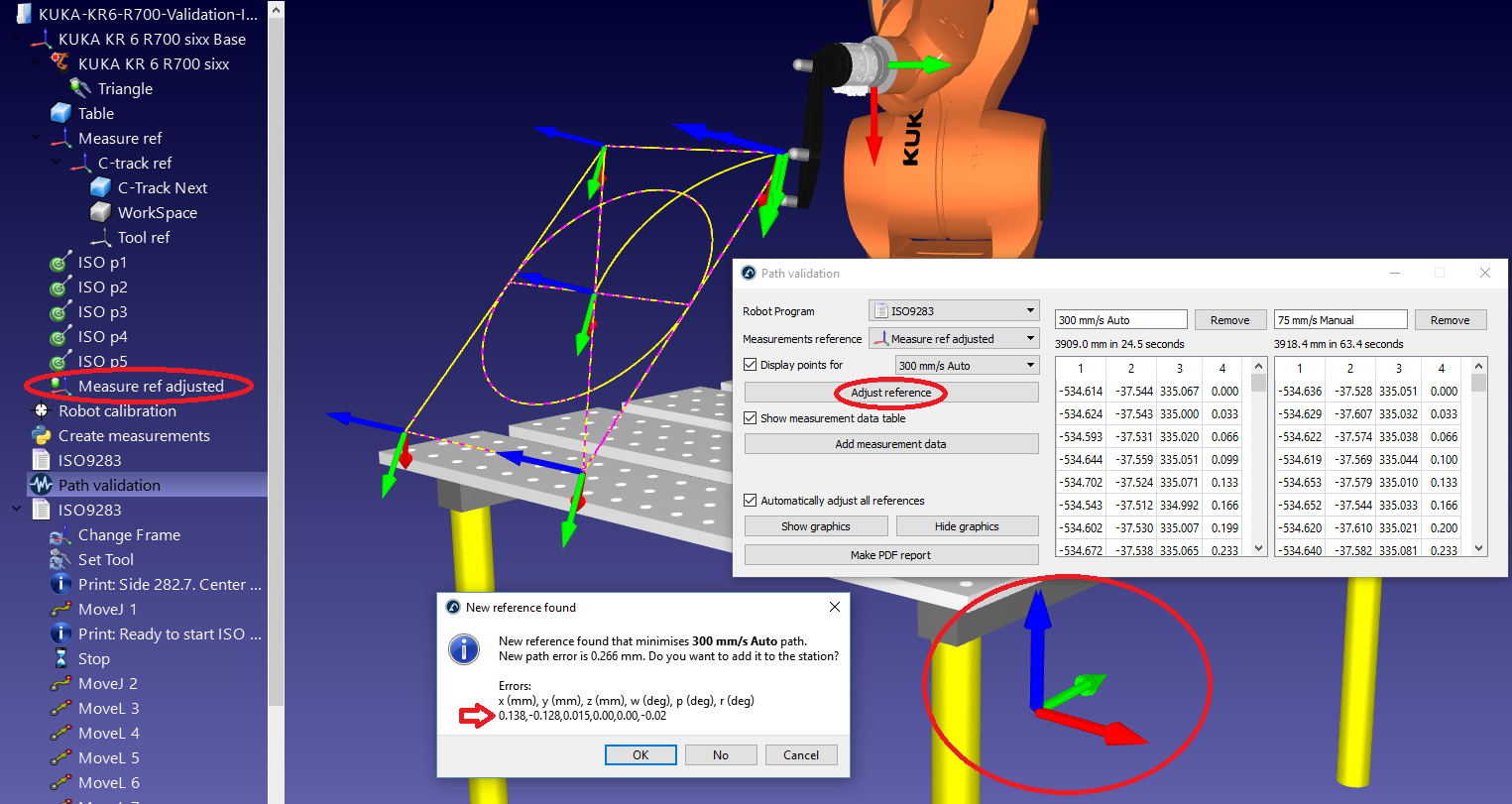
路径准确性测试完成后,可以通过选择获得PDF报告制作PDF报告,从路径验证窗口。这将生成一个PDF,其中包含一些关于路径精度、速度和加速度的统计数据和图形。
下面的图像显示了前面章节中准备的示例测试的结果。在这个例子中,ISO9283程序在两种不同的模式下运行:
●手动模式在75毫米/秒的速度
●自动模式300毫米/秒的速度
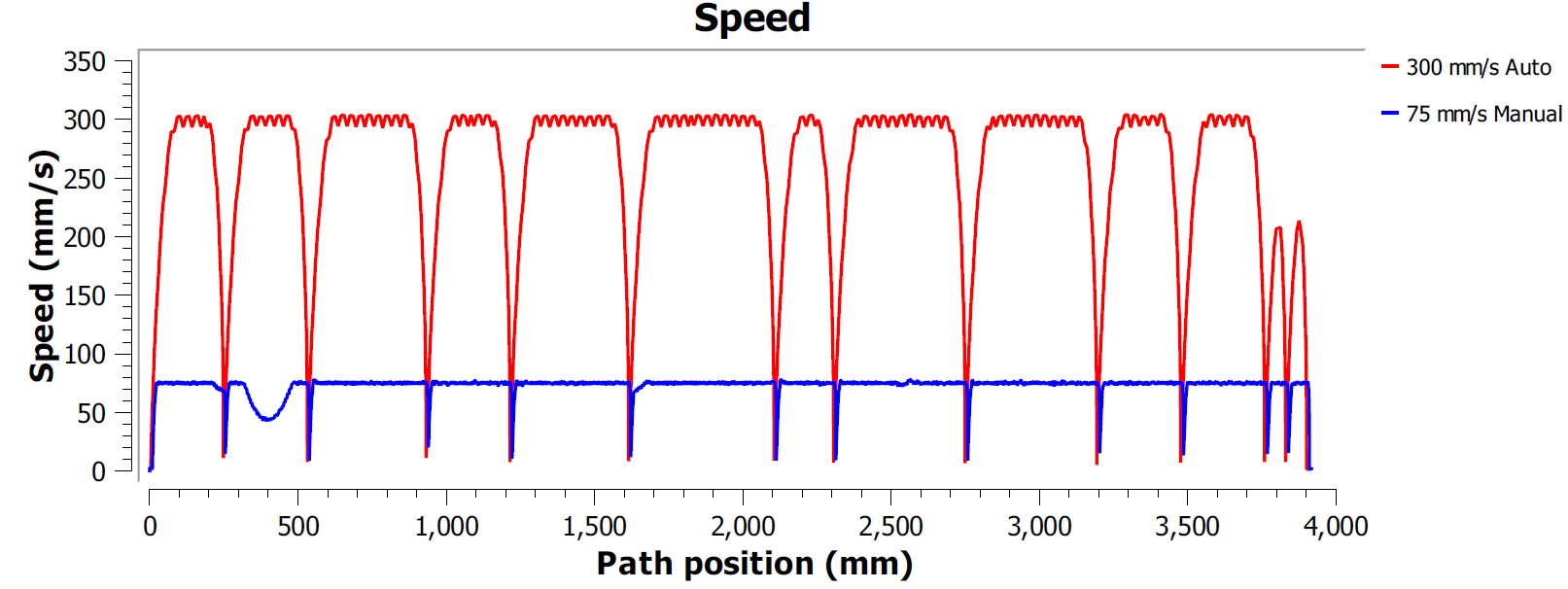
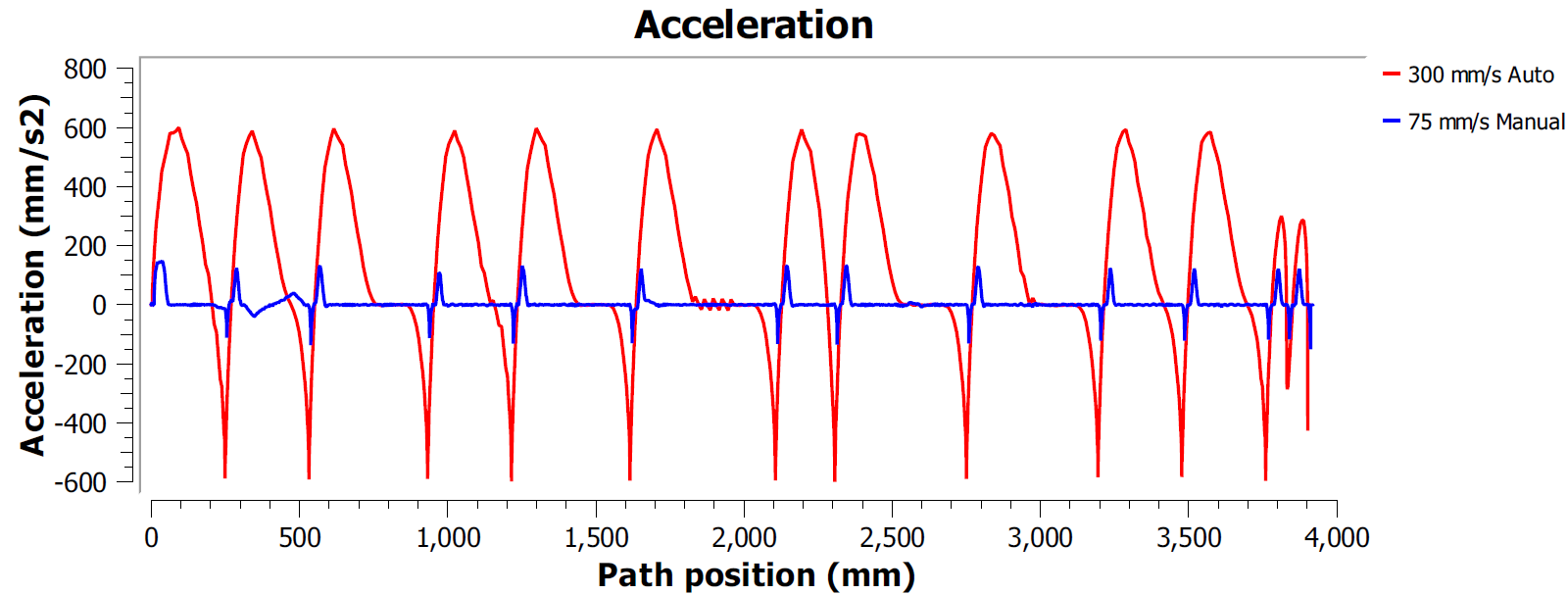
在本例中,两个程序都是使用好精度选择。这意味着机器人将在每个点停下来,以使路径尽可能准确。在这种情况下,通常会观察到沿路径的高加速和高减速,因为在每条线或圆运动(角)的末端速度必须为零。
大多数机器人品牌都提供舍入选项,通过平滑边缘来避免这种影响。例如,ABB将其称为ZoneData,允许指定控制器允许平滑边缘的精确区域;发那克将其称为CNT,允许指定与速度成比例的平滑百分比;库卡选项提供带有C_DIS标志的$ADVANCE指令;Universal Robots允许指定混合半径来平滑边缘)。
因此,路径精度测试允许在保持平滑速度的同时保持接近路径边缘的可接受精度水平之间找到一个很好的折衷。
在RoboDK中可以指定舍入参数以及程序速度。为这样的测试编辑程序:
1.右键单击程序
2.选择显示说明
3.选择第一条或第二条指令
4.选择程序➔设置舍入指令指定舍入精度
5.选择程序➔设定速度指令指定速度
