机器人球杆测试
滚珠测试通常用于测试计算机数控(CNC)机床的性能。该测试也可以对机器人进行,以检查它们的性能和退化情况。测量系统需要两个直径为0.5 '的球体。该测试显示了圆路径的误差、可重复性和间隙。
雷尼绍QC20-W最常见的球杆装置。这个球棒通过电池CR2 (3V)无线工作,需要一台有蓝牙连接的电脑。

下图显示了使用中型机器人进行的球杆测试。

RoboDK软件指导您完成每一步,以成功完成球棒测试。RoboDK可以在3D模拟环境中准备机器人程序,记录球杆测量,并生成特定于您的机器人的性能报告。
要正确进行球杆试验,需要具备以下特点的计算机(生成机器人程序,完成数据采集,生成PDF报告):
1.带蓝牙的笔记本电脑。蓝牙连接必须由“Microsoft Bluetooth stack”(默认)管理。笔记本电脑中包含的蓝牙设备通常非常有限。强烈建议安装带有制造商驱动程序的外部蓝牙模块。
2.必须将电脑的USB端口解锁且不加密。这使得程序可以毫无问题地转移到机器人上。也可以建立FTP连接。
3.的英国QC20-Wballbar工具包。
4.需要安装RoboDK软件,并获取相应的license。对于网络license,需要使用internet连接来检查license。按照以下步骤安装或更新RoboDK以进行球棒测试:
一个。2022世界杯国家队名单从下载部分下载RoboDK
//www.sinclairbody.com/2022世界杯国家队名单download
b。安装ballbar驱动程序:解压并复制ballbar文件夹:
//www.sinclairbody.com/2022世界杯国家队名单downloads/other/ballbar.zip
到文件夹:C: / RoboDK / api / ballbar /
必须准备一个机器人程序来完成球杆测试。机器人程序是围绕一个中心点的圆形路径。本节介绍如何准备程序。在继续之前,建议观看以下介绍视频://www.sinclairbody.com/ballbar-test
机器人单元需要什么:
1.机器人的关节在设置支点支撑(圆心)时。
2.刀具TCP的[X, Y, Z]值(刀具相对于机器人法兰的位置)。如果我们想要与机器人验证一起制作验证工具,这些值是非常重要的。否则,这些信息就不重要了(一个估计就足够了),因为不需要TCP的准确性,也不用球棒测试来验证。
离线准备考试必须遵循以下步骤:
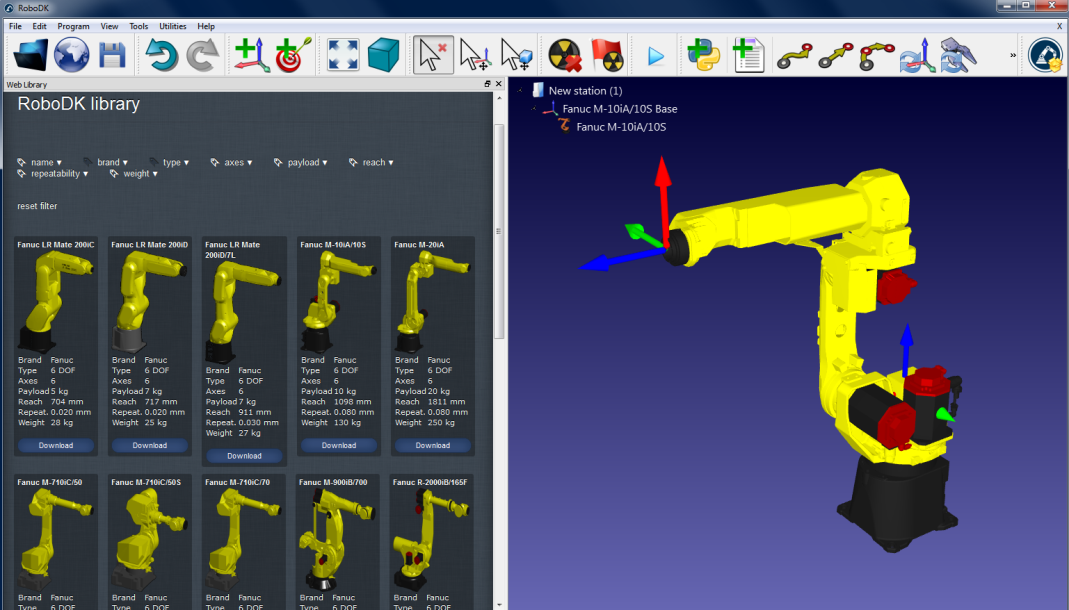
1.选择机器人:
一个。选择文件➔开放网上图书馆。将出现一个窗口,其中包含机器人列表。
b。(可选)使用过滤器来细化机器人的选择。
c。找到您的机器人并选择2022世界杯国家队名单。
另外,选择文件➔打开……然后在计算机中选择一个机器人文件。此档案可从以下网址下载:2022世界杯国家队名单//www.sinclairbody.com/library或获得一个机器人标定后的项目。

2.在工位增加球棒测试模块:
一个。选择公用事业公司➔球棒精度试验
b。将出现以下窗口和目标Ballbar中心将自动创建。如果机器人没有TCP, TCP工具1也会自动创建。
3.插入机器人关节中心的球杆测试(靶)Ballbar中心):
一个。选择集在目标旁边Ballbar中心。
b。输入机器人关节(关节轴1到6)。
c。选择好吧。

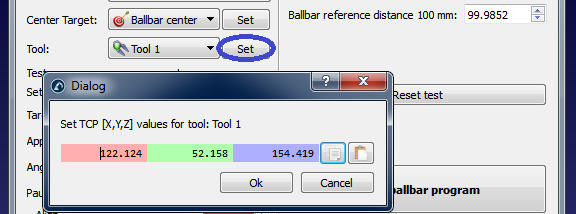
4.输入TCP坐标:
一个。选择集在选中的工具(工具1在这个例子中)
b。输入TCP的X、Y、Z坐标(相对于机器人末端执行器)
c。选择好吧

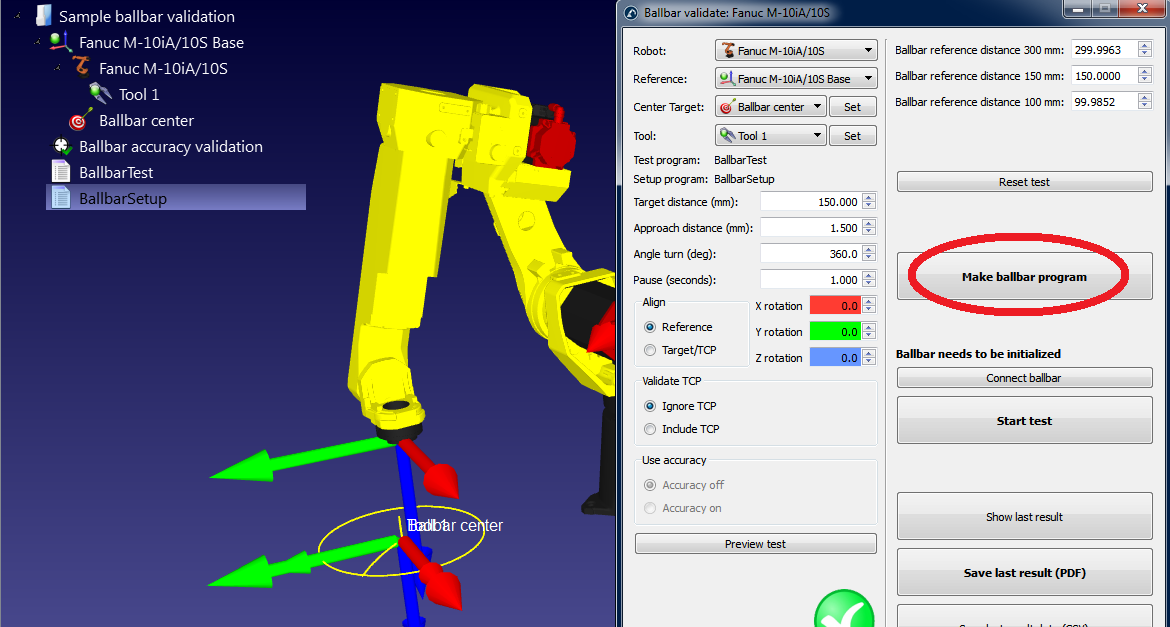
5.生成程序:
一个。选择制作球杆程序程序就会创建出来。实际上,将出现两个程序:
我。BallbarSetup:此程序用于将工具杯中心枢轴点(圆的中心)放置在先前定位的相同位置
2BallbarTest:该程序用于用球杆围绕枢轴点(圆心)做圆,以便进行数据采集
b。双击新生成的程序。RoboDK将模拟机器人运行程序。
如果使用默认设置无法进行球杆测试,则可以更改测试参数。关于如何更改这些设置,请参阅下一节。
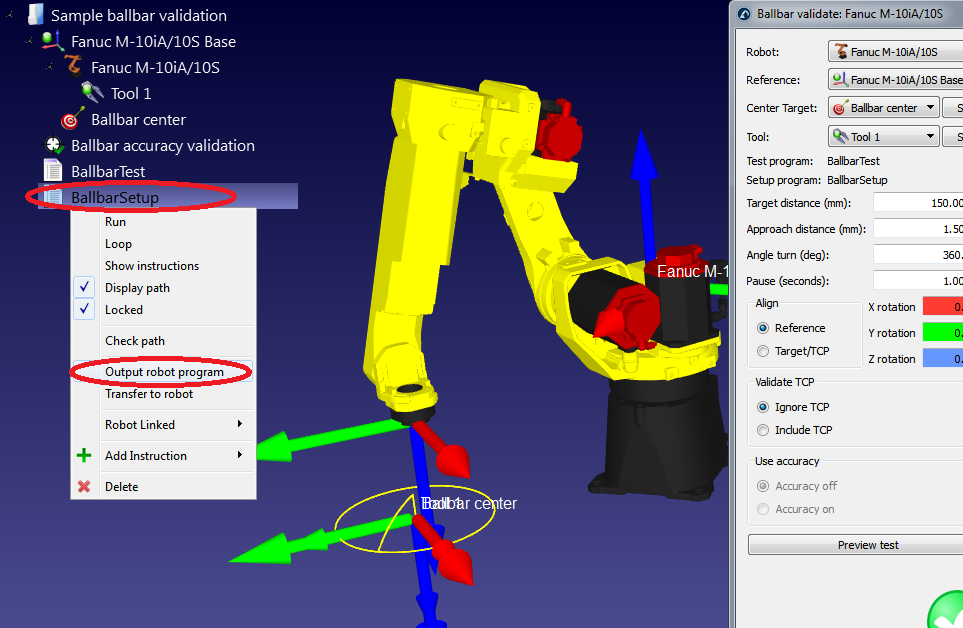
6.一旦机器人程序符合您的喜好,机器人的程序文件就可以生成了:
一个。右键单击BallbarTest程序。
b。选择生成机器人程序
c。重复以上步骤BallbarSetup程序(按F6可在桌面上自动生成所有程序)。
d。然后,程序可以保存在一个u盘中,并传输给机器人。FTP连接也可以用于大多数机器人。
7.最后,选择文件➔省站将RoboDK站点保存在一个文件中。在RoboDK中双击该文件(rdk格式)即可恢复项目。
下面的画面可以在球棒测试参数菜单中看到。可以通过双击该项来访问它球杆精度验证在车站(见上一步)。
可能默认情况下,球棒测试是不可行的。测试的可行性取决于所有这些参数以及中心工具杯的机器人关节和TCP的位置。
如果测试首先是不可行的,我们可以选择“预览测试”,我们可能会看到一个不完整的序列。在这种情况下,我们可以减小“转角(度)”,使程序可行。如果不是这样,我们可以减小圆的半径(“目标距离”)。使用雷尼绍的球棒,我们可以测试100毫米,150毫米和300毫米的距离,误差为+/-1毫米。“接近距离(毫米)”和暂停(“暂停(秒)”)可以保留为默认值。这些参数允许检测测试的开始和结束。
测试平面相对于机器人基准参照系(“对齐”部分中的“参考”)定向,这意味着机器人参照系的XY平面用于创建圆。我们可以选择在工具参考框架下进行测试。在这种情况下,使用工具的XY平面(当中心被教导时)。在这两种情况下,我们都可以在参照系的X, Y和/或Z轴上添加额外的旋转。
如果我们更改某些参数(例如在验证中添加工具),将出现“重要:TCP必须是准确的”消息。这意味着运动是相对于刀具中心计算的。否则,我们可能会出现TCP错误,而测试无论如何都是可行的。
如果我们选择“Include TCP”选项,工具的方向会随着圆的移动而改变。该选项允许评估机器人和工具作为一个系统的误差。否则,我们只检查机器人的错误(“Ignore TCP”)。
介绍测量滚珠条的操作步骤。
你应该有两个机器人程序:
●BallbarSetup:该程序允许将球杆测试的中心(中心工具杯)设置在我们记录机器人关节的同一位置。
●BallbarTest:本程序是围绕中心工具杯的圆形路径,用球棒进行测量采集。
为了确保中心工具杯在正确的位置,我们必须运行程序BallbarSetup。机器人将以线性方式移动到中心点。然后我们必须放置并锁定磁性支架。
我们必须确保我们已经正确输入了球棒套件的母材参数(见下图)。这些值必须在“球杆参考距离……”的情况下插入。,从测试参数菜单中。球棒将能够测量这些距离±1毫米与一微米的精度。这种精度对于工业机器人来说是足够的,但在某些情况下测量世界杯2022美洲预选赛直播范围会受到限制。


我们可以通过选择“start test”开始测试(之前不需要选择“Connect ballbar”)。将出现一个显示ballbar连接状态的新窗口。如果未检测到ballbar或存在某些问题,则必须关闭ballbar连接窗口,关闭ballbar设备,然后将其重新打开,然后重试开始测试。如果问题仍然存在,请确保您有适当的蓝牙连接。
一旦与球棒建立蓝牙连接,RoboDK将指导用户遵循以下步骤:
1.用为测试选择的距离初始化球杆。
2.将机器人移动到开始位置(程序将暂停,然后继续)
3.然后使用者必须将球杆放入机器人中。
4.在计算机屏幕上选择OK启动测试。除非我们选择继续使用机器人教学吊坠,否则机器人不会移动。
5.如果一切正确,将出现一个新窗口,显示球杆当前测量值。
6.我们可以继续让机器人程序沿着路径移动。
7.当机器人完成运动后,我们可以停止测量(顺时针和逆时针)。
当测试完成后,RoboDK将显示测试结果,并要求用户将报告保存为PDF格式。
第4步对于检测测试的开始和结束很重要。这些限制是检测到的,因为机器人做了大约1.5毫米的径向运动来触发测量的开始和结束(在路径的起点和终点)。
测试完成后,得到一份PDF报告(如下图所示):

报告显示了顺时针和逆时针运动(分别为蓝色和红色线)相对于以秒为单位的时间(底部X轴)的球棒读数,单位为毫米(左侧Y轴)。机器人的关节也会显示出来。机器人关节以度(右Y轴)显示,相对于圆角度(360度表示一个完整的转弯)。当相应的关节运动改变方向时,故障电机会显示出相当大的测量变化,注意到相当大的反弹。
如果反弹大于给定的阈值,报告将阻止用户。阈值可以在菜单中定义工具➔选项➔准确性选项卡。

附件-蓝牙连接#BallbarBluetooth
本节介绍如何在计算机和球杆之间建立蓝牙连接。为了使通信工作,我们必须首先使用Windows在计算机和球棒设备之间建立通信。
必须激活“Windows蓝牙堆栈”(Windows上的默认蓝牙管理器)。然后,您必须按照以下步骤建立第一个连接:
1.选择Windows开始按钮
2.选择控制面板
3.查找关键字蓝牙

4.选择蓝牙设备
5.选择添加设备如果你没有看到球杆装置。
6.一旦设备出现,你必须选择它并选择下一个。你看到的数字是打印在设备上的球棒序列号。
7.最后,您应该选择结对不使用代码。
蓝牙设备现在已经准备好通过RoboDK进行测量。


如果我们使用一些笔记本电脑(即使是最新的电脑)中集成的蓝牙加密狗,蓝牙连接可能会非常有限。然后建议购买一个外部蓝牙加密狗,这样连接就不会有任何问题。
电脑不应离球棒装置太远。如果连接出现问题,建议使用USB延长线连接蓝牙加密狗。