机器人司机
机器人司机可以控制连接到计算机上的真正的机器人。机器人驾驶员使用特定的软件接口来控制和监视特定的机器人控制器,使计算机能够直接控制机器人手臂。
机器人司机提供了另一种选择2022世界杯8强赛时间(其中程序被模拟、生成,然后传输到机器人并执行)。有了机器人司机,你可以在模拟机器人时移动机器人(在线编程)。
下面的文章展示了一个使用机器人驱动程序的在线编程项目的例子://www.sinclairbody.com/blog/online-programming/
在RoboDK中编程的任何机器人模拟都可以使用机器人驱动程序在机器人上执行。然后,机器人在模拟器中的运动与真实机器人同步,从而可以实时调试机器人程序。
以下列表提供了RoboDK中支持的一些机器人驱动程序:
·ABB
·Comau
·日本电装
·斗山
·爱普生
·发那科
·川崎
·库卡的方式呈现
·库卡IIWA
·Mecademic
·三菱
·史陶比尔
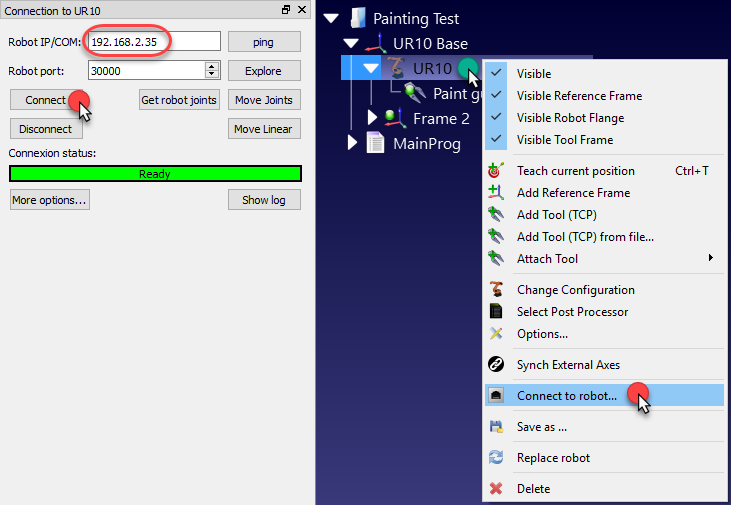
本节介绍如何使用机器人驱动程序从RoboDK连接到真正的机械臂,并进行一些简单的操作。
1.右键单击机器人
2.选择![]() 连接到机器人…
连接到机器人…
3.输入机器人的IP
4.选择连接
绿色信息显示准备好了如果连接成功,将显示如下图所示。
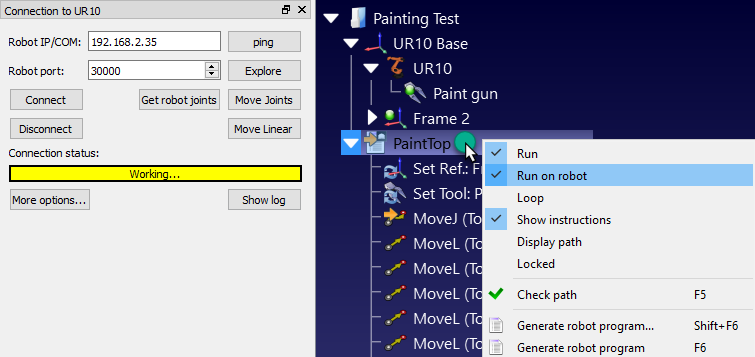
使用图形用户界面(GUI)创建的机器人程序可以按照以下步骤在机器人上执行。
1.右键单击a![]() 程序
程序
2.检查在机器人上运行选项
3.双击程序启动它
程序应该在真正的机器人上启动,模拟器将跟随机器人的运动。将显示连接状态工作……当机器人忙的时候用黄色。
控制机器人的运动是可能的RoboDK API例如,通过Python程序或c#应用程序对机器人进行编程。
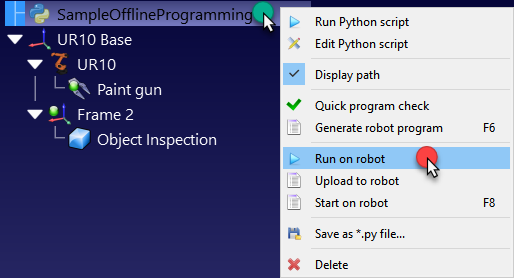
当从RoboDK运行Python程序时,Run on robot选项会自动管理。按照以下步骤在机器人上运行Python程序:
1.右键单击a![]() Python程序
Python程序
2.选择![]() 在机器人上运行
在机器人上运行
程序应该开始在机器人上运行,机器人的连接状态也会相应更新。
如果程序在RoboDK的GUI之外执行(为了调试目的,或者如果我们使用c#的RoboDK API),我们可以设置RunMode使用RDK.setRunModeRUNMODE_RUN_ROBOT。这将迫使程序在机器人上运行。也可以使用robot.Connect ().
下面的代码展示了一个简单的例子,直接从API与机器人建立连接:
#启动RoboDK API
RDK=Robolink()
机器人=RDK.项(”,ITEM_TYPE_ROBOT)
#使用默认连接参数连接机器人
成功=机器人.连接()
状态,status_msg=机器人.ConnectedState()
如果状态! =ROBOTCOM_READY:
#如果连接不成功则停止
提高异常("连接失败:"+status_msg)
#设置为在机器人上运行robot命令
RDK.setRunMode(RUNMODE_RUN_ROBOT)
#注意:如果我们使用
# robot.Connect()通过API
#移动机器人:
机器人.MoveJ([10,20.,30.,40,50,60])
掠夺=RDK.项(“MainProgram”,ITEM_TYPE_PROGRAM)
掠夺.setRunType(PROGRAM_RUN_ON_ROBOT)#设置机器人运行选项
#设置为PROGRAM_RUN_ON_SIMULATOR只在模拟器上运行
掠夺.调用()
而掠夺.忙()==1:
暂停(0.1)
打印(“项目完成”)
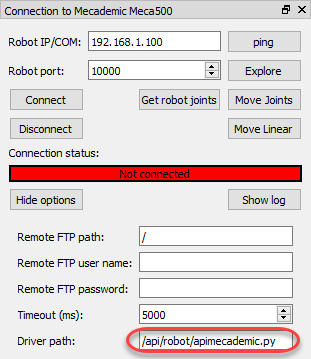
机器人驱动程序默认在/RoboDK/api/Robot/文件夹中。RoboDK链接到机器人连接设置中的特定驱动程序:
1.右键单击机器人
2.选择![]() 连接到机器人…
连接到机器人…
3.选择更多选项…
4.在文件中找到或输入驱动程序路径驱动程序路径部分
一个机器人驱动程序是一个独立的控制台应用程序。机器人驱动程序可以使用任何编程平台开发,例如,它们可以是Python模块(PY格式)或在任何开发环境下构建的任何可执行程序。
机器人驱动程序允许通过命令行与机器人通信。RoboDK也使用可以手动执行的相同命令来从PC驱动机器人。每个机器人驱动程序都可以在控制台模式下运行以进行测试。
在C:/RoboDK/bin/robot/中可以找到一个示例Python驱动程序(apimecademic.py)及其源代码,用于控制meca学术类机器人。
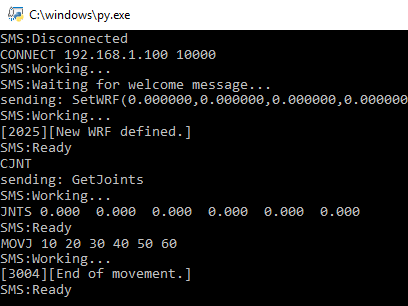
双击apimecademic.py文件以控制台模式运行模块(必须安装Python)。驱动程序将等待任何新的命令。例如,我们可以输入以下命令,在提供IP和通信端口的情况下连接机器人:
连接192.168.100.1 10000
如果连接成功,我们应该看到短信:准备好了消息。然后,我们可以输入以下命令来检索当前机器人关节:
CJNT
我们也可以输入其他命令,如MOVJ, MOVL或SETTOOL来移动机器人或更新TCP:
Movj 10 20 30 40 50 60
一些机器人支持实时监控关节位置。在这种情况下,可以通过发送JNTS_MOVING命令在机器人移动时提供关节位置反馈。当RoboDK运行驱动程序时,虚拟机器人将实时跟随真实机器人的运动。在发送Ready消息之前,不会处理新命令。
与控制台的交互以及与机器人的连接由一个用于学术驱动程序的Python模块管理。如本节所述,所有机器人与控制台的交互应该是相同的。但是,与每个机器人的交互取决于机器人制造商,在本例中我们指的是Meca 500编程手册发送适当的命令。这些命令允许移动和监控Meca 500机器人。
设置机器人司机可能不像下面这样简单脱机生成程序(2022世界杯8强赛时间离线编程)。如果连接不能正常工作,本节将提供一些提示,帮助您找到问题的根源。
1.确保机器人的IP正确且可达:从机器人连接菜单中选择ping按钮(或者通过命令行ping机器人),以确保机器人和计算机在同一网络中。
2.设置一个静态IP对于计算机,如果机器人和计算机不在同一网络中。
3.如果您使用的是Windows:请确保Windows防火墙已关闭,以防止阻塞任何连接。
4.确保通信端口在机器人端是合适的和可用的。
5.根据控制器模型,确保在机器人控制器上遵循适当的指令。
6.在“机器人连接”窗口中双击“断开连接”以迫使驱动程序停止,然后选择“再次连接”以尝试新连接。
ping测试将测试机器人在互联网协议(IP)网络上的可达性。
按照以下步骤在Windows上执行ping测试:
1.通过选择打开一个新的控制台窗口![]() (windows键+ R)
(windows键+ R)
2.类型cmd并选择OK
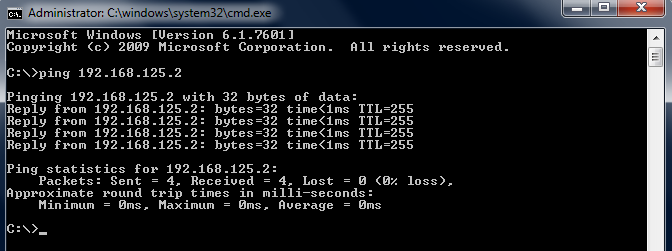
3.输入ping IP,其中IP应该是您的机器人的IP)。例子:
萍192.168.125.2
我们应该看到一个类似于图像的响应,信号损失为0%
如果没有通信,我们应该验证机器人的IP和PC在同一个局域网(LAN)中。可能需要关闭Windows防火墙或添加允许通信的规则。
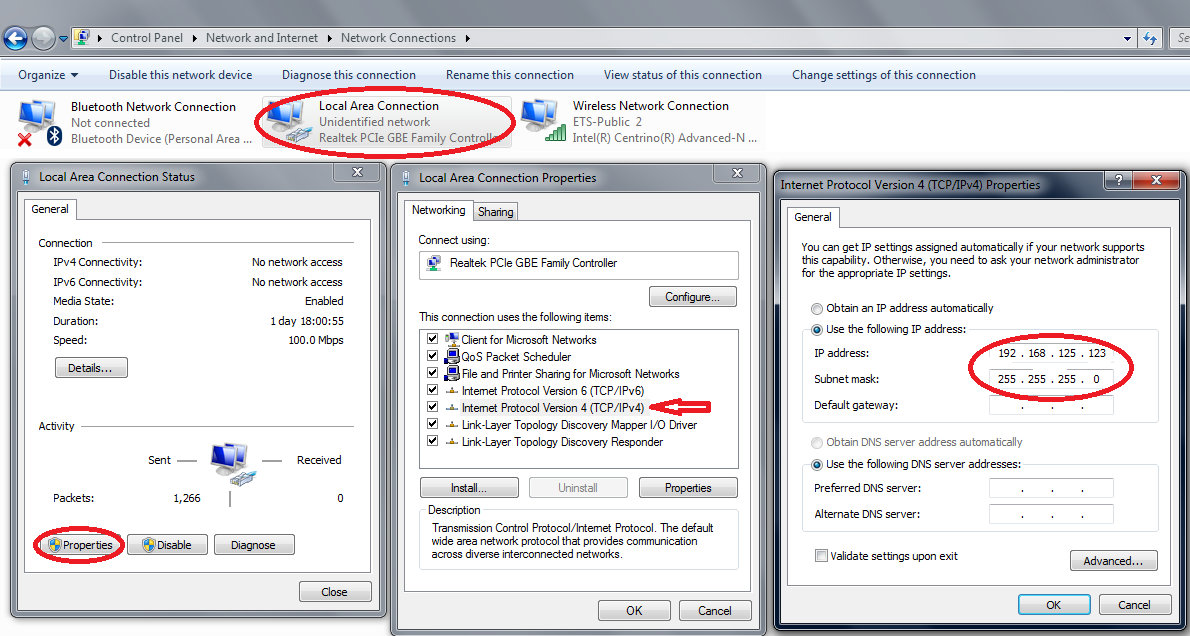
按照以下步骤更改计算机的IP:
1.选择Windows开始➔控制面板➔网络与互联网➔网络连接
2.双击本地连接卡
3.选择Properties。
4.选择Internet协议版本4 (TCP/IPv4)
5.选择属性
6.根据机器人IP和子网掩码输入计算机的IP。