机器人校准(激光跟踪仪)
一旦机器人被校准,我们通常需要RoboDK来过滤程序,因此,需要一个RoboDK许可证(一个基本的OLP许可证足以在机器人被校准后生成准确的机器人程序)。筛选程序是指在考虑所有校准参数(约30个参数)的情况下,对程序中的目标进行改变/优化,以提高机器人的精度。
或者,我们可以只校准关节偏移量加上基座和工具参考框架(4个关节偏移量参数加上基座框架的6个参数加上工具框架的6个参数)。校准不会像我们使用默认的完整校准那样准确,但它可能允许在机器人控制器中输入某些参数,而不依赖于RoboDK来生成机器人程序。
为了获得仅针对关节偏移量的校准,我们必须选择Calib。参数。按钮,然后掌握按钮(在机器人校准菜单内)。
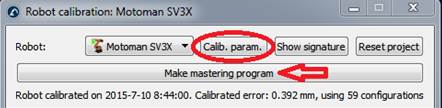

选择制作母版程序后,将出现一个新窗口。在这个窗口中,我们可以选择我们想要考虑创建新home位置的坐标轴。

这个按钮制作母版程序会出现在机器人校准窗口中。选择此按钮生成程序,将机器人带到新的起始位置。将其传递给机器人并执行,然后必须记录新的家园位置。
如果机器人和PC连接,我们可以右键点击程序并选择向机器人发送程序自动将程序发送给机器人。否则,我们可以选择生成机器人程序来查看主位置的新关节值。

作为一个例子,我们必须遵循下面的步骤来更新Motoman机器人的home position。
我们必须先运行“掌握”程序,把机器人带到新的位置。
一旦程序进入控制器,我们必须以“管理模式”登录(Motoman机器人的密码通常是99999999),我们需要进入教学模式。下面的图像显示了必须遵循的步骤。


确保更新了所有机器人关节的主位置。
一旦设置了主位置,我们必须删除将机器人带到新主位置的机器人程序。