机器人校准(激光跟踪仪)
英语
多伊奇
法语
意大利语
西班牙语
中文
嘻嘻哈哈
日本語
泰国
基本指导
3 d导航
开始
工具栏菜单
快捷键
参考帧
设置默认设置
解决问题
开始
新项目
选择一个机器人
添加参考系
导入3D对象
创建工具
设置相对TCP
移动工具的几何形状
创建目标
添加一个方法程序
在表面上创建目标
添加撤回程序
主程序
生成机器人程序
使用脚本
接口
机器人小组
机器人工具(TCP)
参考系
机器人目标
机器人的配置
对象设置
主菜单
文件菜单
编辑菜单
程序菜单
视图菜单
工具”菜单
工具菜单
连接菜单
帮助菜单
选项菜单
General选项卡
站选项卡
显示选项卡
运动选项卡
CAD选项卡
凸轮选项卡
程序选项卡
Python选项卡
驱动程序选项卡
准确性选项卡
其他选项卡
机器人的程序
2022世界杯8强赛时间
创建一个程序
程序指令
联合行动
线性移动
设置参考系
套装工具框架
循环移动
设定的速度
显示消息
暂停
程序调用
设置/ IO等待
设置舍入值
模拟事件
模拟程序
生成程序
转移项目
选择后置处理器
程序生成设置
将圆周运动转换为直线运动
拆分大型机器人程序
内嵌子
机器人制造
机器人加工实例
开始与机器人加工
机器人加工入门(5次)
外轴机器人加工
激光切割
机器人模具加工
机器人去毛刺
抛光
加工设置
机器人加工项目
路输入
项目活动
方法/收回
刀具偏移路径
优化参数
优先配置
更新程序
机器人切割
机器人握住物体
曲线跟踪项目
进口曲线
点跟踪项目
进口分
机器人3D打印项目
用于机器人3D打印的后置处理器
提示和技巧
较小/较大的参考文献(-/+)
重命名对象(F2)
显示/隐藏机器人工作区(*)
打开最后一个项目或文件(Ctrl+1)
将Station Tree显示为侧窗
显示或隐藏对象(F7)
在屏幕上显示或隐藏文本(/)
移动参考帧或对象(Alt)
移动机器人工具(Alt+Shift)
重新排序树中的项目
在不移动的情况下重新排序树中的物品
更改站点树的大小
教一个机器人目标(Ctrl+T)
修改机器人目标(F3)
教机器人在一个表面上的目标
在表面上移动机器人目标(Alt+Shift)
更改机器人配置
检查机器人程序的状态(F5)
快速模拟(按住空格键)
生成机器人程序(F6)
导出模拟(Ctrl+E)
发送程序给机器人(Ctrl+F6)
在机器人上运行程序
显示机器人轨迹(Alt+T)
一般建议
定义工具(TCP)
定义一个参考系
将对象与引用对齐
对齐机器人参考
校准转盘
校准1轴转盘
校准一个2轴转盘
导入STEP和IGES文件
显示性能
出口仿真
搅拌机
仿真速度
周期时间
更改颜色工具
测量工具
创建一个机构或机器人
如何建模一个1轴转盘
如何建立1轴线性轨道的模型
如何建立一个2轴线性轨道模型
如何建立一个三轴直角机器人模型
如何模拟一个两指平行夹持器
如何建模一个六轴机器人手臂
同步其他轴
优化外轴
插件
插件
插件管理器
插件接口
应用程序
托盘包装
托盘包装
加载码垛插件
设置站
创建取放
创建码垛项目
设置码垛项目
创建图层设计
生成机器人程序
计算机视觉
模拟摄像机
添加摄像机视图
摄像机预览窗口
相机的设置
通过API访问模拟相机图像
手眼标定
摄像机模拟示例
条形码阅读
对象检测
OPC-UA
启用OPC-UA外接程序
OPC UA服务器示例
配置OPC UA服务器
创建自己的电台
使用UaExpert实现
添加服务器
连接到服务器
节点
RoboDK
SimulationSpeed
站
站点参数/站点值
时间
方法
getItem
getJoints
getJointsStr
setJointsStr
实现Beckhoff TwinCAT3
添加服务器
配置服务器
添加RoboDK服务器方法
自动生成RoboDK方法
PLC程序示例
OPC UA客户端示例
接口实现
添加客户端
节点
使用RoboDK API实现
安装
脚本
逼真机器人仿真(RRS)
需求
RoboDK RRS接口
RoboDK RRS for Comau(插件)
RoboDK形状插件
安装
形状
盒子
球
锥
输送机
基座
表格
栅栏
插件
SolidWorks的RoboDK插件
安装
SolidWorks工具栏
设置
例子
机器人焊接
液体分配
螺旋桨的例子
手动安装
RoboDK插件西门子固体边缘
安装
实边工具栏
设置
例子
机器人抛光
手动安装
Mastercam的RoboDK插件
介绍
外接程序设置
工具栏
机器人安装
更新所选操作
从Mastercam生成机器人程序
插件设置
例子
三轴机器人加工
五轴机器人切割
手动安装
Rhino的RoboDK插件
安装
犀牛工具栏
蚱蜢工具栏
设置
例子
雕刻圆顶
圆顶的条纹
蚱蜢的例子
手动安装
RoboDK插件的MecSoft
介绍
RhinoCAM设置
工作流
模拟机器人加工
生成机器人程序
RhinoCAM例子
用RhinoCAM加工三轴机器人
用RhinoCAM加工五轴机器人
RoboDK插件的发明者
安装
发明家工具栏
设置
例子
机器人抛光
机器人切割/磨
手动安装
RoboDK插件的功能
介绍
外接程序设置
命令
自动设置
生成机器人程序
插件设置
例子
三轴机器人加工
五轴机器人加工
RoboDK插件的融合360
安装
Fusion 360工具栏
设置
例子
激光切割
胶水配剂
机器人去毛刺
手动安装
hyperMILL的RoboDK插件
hyperMILL介绍
hyperMILL设置
hyperMILL工作流
BobCAD-CAM的RoboDK插件
BobCAD-CAM介绍
BobCAD-CAM安装
工具栏
机器人安装
更新所选操作
生成程序
插件设置
碰撞检测
碰撞检测
碰撞的地图
更快的碰撞检测
机器人加工中的避碰
无碰撞运动规划器
使用PRM运动规划器
运动规划设置
约束关节极限
选择PRM参数
生成的路线图
链接的目标
链接程序
添加新目标到映射
技巧和最佳做法
例子
机器人加工
介绍
机器人加工实例(三轴)
加工程序在RhinoCAM
机器人加工项目(3x)
创建机器人加工路径
模拟机器人的加工操作
自定义工具方向
生成机器人程序
更改后置处理器
机器人加工(5倍)
介绍
机器人加工实例(五轴)
加工程序在RhinoCAM
机器人加工项目(5个)
选择你的机器人
创建机器人加工坐标系
自定义工具方向
机器人加工工作之间的安全转换
抛光
介绍
抛光的例子
设置
来自Inventor的3D草图
RoboDK站
去毛刺
介绍
塑料去毛刺示例
设置
来自Fusion 360的2D草图
RoboDK站
调剂
介绍
液体配药实例
设置
来自SolidWorks的2D草图
RoboDK站
模具加工
介绍
三轴模具机器人加工
RoboDK设置
Mastercam中的加工刀具轨迹
机器人加工在RoboDK
机器人切割
介绍
五轴机器人切割
RoboDK设置
Mastercam中的切削刀具路径
RoboDK中的机器人切割
机器人焊接
介绍
机器人焊接实例
设置
来自SolidWorks的2D草图
激光切割
介绍
激光切割实例
设置
方法一:特征提取
方法二:融合360度激光切割特点
机器人技巧
ABB机器人
转移机器人程序
启动一个机器人程序
检索TCP
通过FTP传输程序
ABB RoboDK驱动程序
Comau机器人
转移机器人程序
后处理器行为
日本电装机器人
如何启动b-Cap服务器
在PC上运行程序
Denso的RoboDK驱动程序
发那科机器人
转移机器人程序
启动一个机器人程序
取回机器人关节
检索机器人工具(TCP)
设置发那科的FTP服务器
Fanuc的RoboDK驱动程序
程序编译(LS vs. TP)
更新控制器运动学参数
库卡机器人
转移机器人程序
后处理器行为
启动一个机器人程序
检索TCP
取回机器人关节
管理员模式
KUKA的RoboDK驱动程序
使用脚本自动配置
自动配置
手动配置
KUKA的遗留驱动程序(Kukavarproxy)
外部轴
机器人标定
Mecademic
检索学术机器人IP
在学术控制器上运行一个程序
如何加载脚本文件
如何运行PY文件
从RoboDK运行程序
其他技巧
离线程序
速度单位
安川摩托机器人
安川摩托的RoboDK驱动程序
更新脉冲每度信息
Omron-TM机器人
通过USB传输文件
设置监听节点
通用的机器人
检索UR机器人IP
从RoboDK运行程序
如何在URe上启用远程控制
你的监控
在UR控制器上运行一个程序
如何加载URP程序
如何加载脚本文件
传输程序(FTP)
URSim安装指南
2022世界杯国家队名单下载URSim要求
VirtualBox
Windows与URSim共享文件夹
使用UR Sim卡自带的RoboDK Driver
更新机器人运动学
后处理器
选择后置处理器
后置处理器编辑器
修改后置处理器
修改的例子
在一个文件中生成所有程序
强制限速
使用关节角度施加运动
可用的后置处理器
参考
虚拟现实
虚拟现实动作
显示性能
虚拟现实质量
视图管理器
RoboDK API
Python API
Python模拟
Python OLP
Python在线编程
在RoboDK中排除Python设置问题
c# API
c#模拟
c# OLP
c#在线编程
Matlab API
仿真软件的例子
命令行选项
机器人司机
如何使用机器人司机
使用GUI
使用API
定制机器人司机
进行故障排除
Ping测试
设置静态IP
精度
RoboDK TwinTool
介绍
需求
线性量规传感器
校准的设置
自定义设置
校准向导
校准结果
验证
验证工具校准
设置
校准设置
RoboDK TwinTrack
介绍
需求
设置SteamVR和HTC Vive追踪器
设置
系统标定
机器人标定
探针校准
离线编程
教学目标
教曲线
教授坐标系统
运动中的曲线教学
设置
程序过滤
精准离线编程2022世界杯8强赛时间
校准机器人参数
参考系和工具架
校准工具
参考系校准
机器人校准(激光跟踪仪)
介绍
需求
离线设置
RoboDK站
生成校准目标
机器人校准设置
连接到跟踪器
连接机器人
测量参考目标
机器人标定
测量底座
测量工具
机器人标定
机器人的验证
结果
程序过滤
使用API筛选程序
使用API筛选目标
机器人控制
参考系和工具架
校准工具
参考系校准
附件一-轴1和轴6的母带
轴6参考
轴1参考
附件二-测试法罗激光跟踪器
机器人标定(光学三坐标测量机)
介绍
需求
离线设置
RoboDK站
生成校准目标
机器人校准设置
探测参考系
连接到跟踪器
连接机器人
机器人标定
测量底座
测量工具
机器人标定
机器人的验证
结果
程序过滤
使用API筛选程序
使用API筛选目标
机器人控制
参考系和工具架
校准工具
参考系校准
附件一-轴1和轴6的母带
轴6参考
轴1参考
机器人球杆测试
介绍
测试需求
离线准备
创建一个RoboDK工作站
编辑球棒测试参数
测试ballbar
球棒检测报告
ISO9283性能测试
介绍
需求
离线设置
定位精度和重复性
路径精度
结果
参考系校准
选择
公用事业公司
➔
校准参考
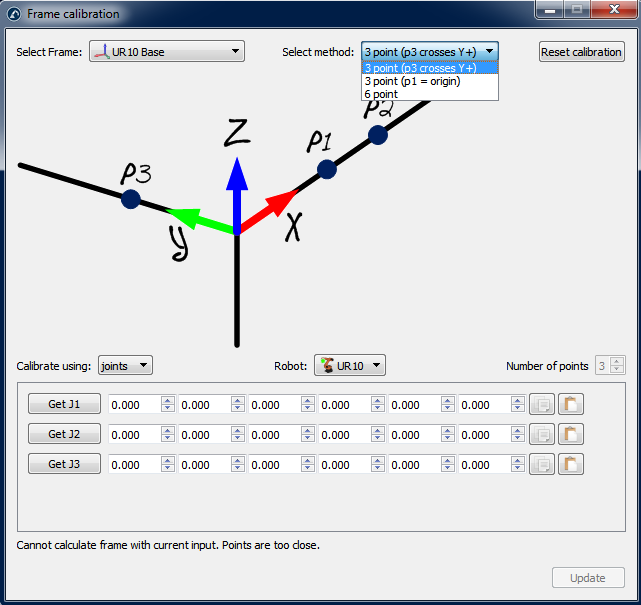
校准参考系校准参考系可以用不同的方法来设置参考系。在图的示例中,一个参考系由三个点定义:点1和点2定义X轴方向,点3定义正Y轴。
重要的是:
建议在标定参照系之前使用关节目标和激活机器人精度,因为机械臂的精度有助于更好地定义参照系。
注意:
有关参考系校准的更多信息,请参阅
提示部分
.
×
关闭