机器人校准(激光跟踪仪)
建议在开始测量之前,在RoboDK中创建机器人设置的虚拟环境(离线设置)。介绍离线准备RoboDK站的操作步骤。这可以在安装机器人和跟踪器之前完成,只需使用安装了RoboDK的计算机。
RoboDK校准设置示例可从以下文件夹下载:2022世界杯国家队名单
//www.sinclairbody.com/2022世界杯国家队名单downloads/calibration/
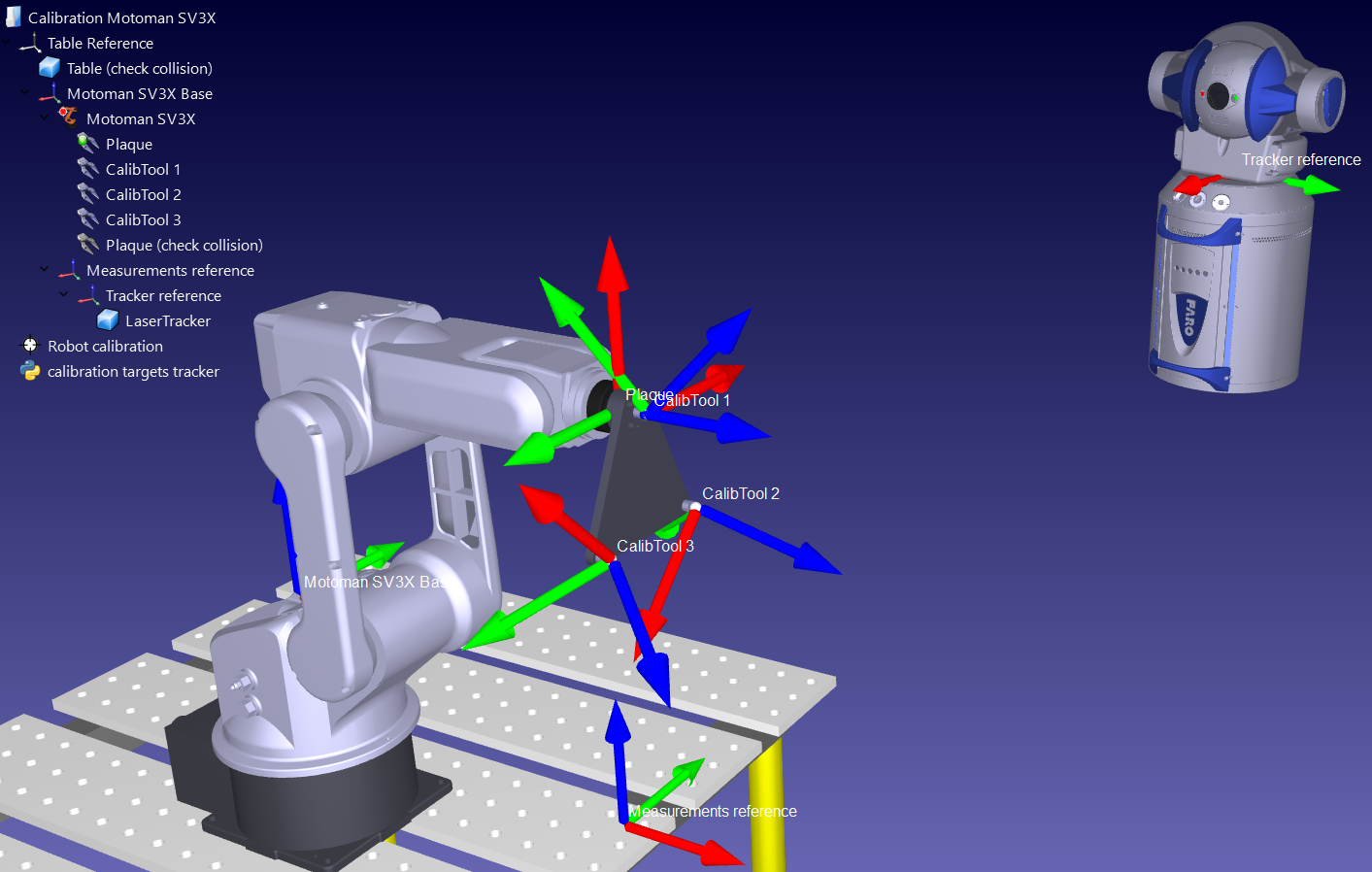
如果您已经有一个脱机计算单元,请跳过本节。参考框架和工具框架可以近似估计。样站如下图所示。
RoboDK站是存储虚拟环境站和校准信息的地方。站点被保存为RDK文件。按照下面的步骤,从头开始创建机器人校准的机器人站(视频预览:https://youtu.be/Nkb9uDamFb4):
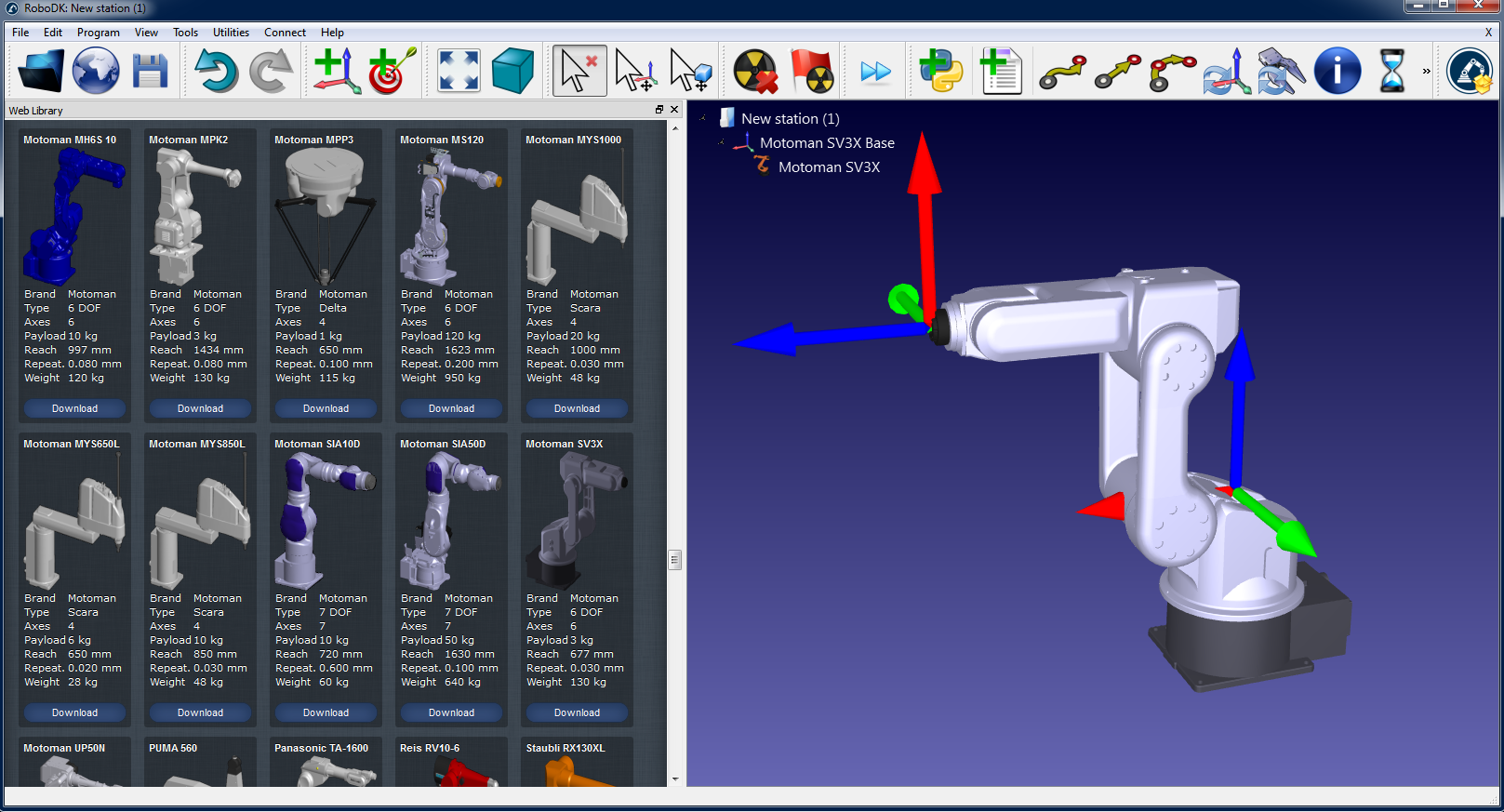
1.选择机器人:
一个。选择文件➔开放网上图书馆.在线图书馆将出现在RoboDK中。
b。使用过滤器根据品牌、有效载荷找到您的机器人……
c。选择2022世界杯国家队名单并且机器人应该自动出现在工作站。
d。或者,下载机器人文件(。2022世界杯国家队名单机器人文件扩展名)分开//www.sinclairbody.com/library用RoboDK打开它们。
2.为虚拟站建模
一个。通过选择添加参考系程序➔添加参考系.
我。一个“测量参考”框架必须相对于机器人的基础框架增加。
2对于我们刚刚添加的“Measurements引用”,必须添加一个“Tracker引用”。
3可以在“测量参考”框架上添加一个额外的“工具参考”,以可视化跟踪器看到的工具位置。
技巧1:拖放树中的项,以重建现实世界中存在的依赖项。例如,跟踪器参考必须与“测量参考”相对放置。
技巧2:分别按住ALT键和SHIFT+ALT键大致移动任何参考帧或工具帧。或者,双击参考系并输入正确的坐标。
技巧3:使用项目树上的F2键重命名任何对象。
b。添加工具对象(支持STL、IGES和STEP文件格式)并将其拖放到机器人中(在项目树中),这将把对象转换为工具。更多可用信息在这里.
 ➔
➔
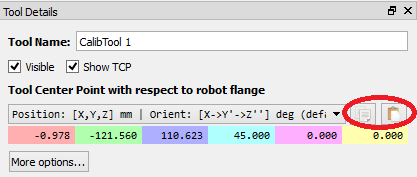
可选:选择程序➔添加空工具添加我们想要在站中可视化的任何TCP(以检查碰撞或其他)。设置TCP的近似值。
我。双击新工具。
2设置一个大致的TCP值。您可以使用右边的两个按钮一次复制/粘贴6个值。
3建议将用于校准的tcp重命名为“CalibTool id”,其中id为校准目标编号。
c。添加其他3D CAD文件(STL, IGES, STEP, SLD,…),使用菜单对虚拟站进行建模文件➔打开……或者,将文件拖放到RoboDK的主窗口中。
技巧1:导入测量工作区的3D文件,并将其命名为workspace,以便在跟踪器的工作区内生成机器人测量值。或者,如果我们不想约束跟踪器工作空间中的度量,可以设置工作空间不可见。下一节提供更多信息。
技巧2:可以选择CTRL+ALT+Shift+P来阻止导出在RoboDK中导入的机密3D文件。
3.在站内增加校准模块:
一个。选择菜单公用事业公司➔机器人标定.
b。选择激光跟踪器.
然后,将出现以下窗口。
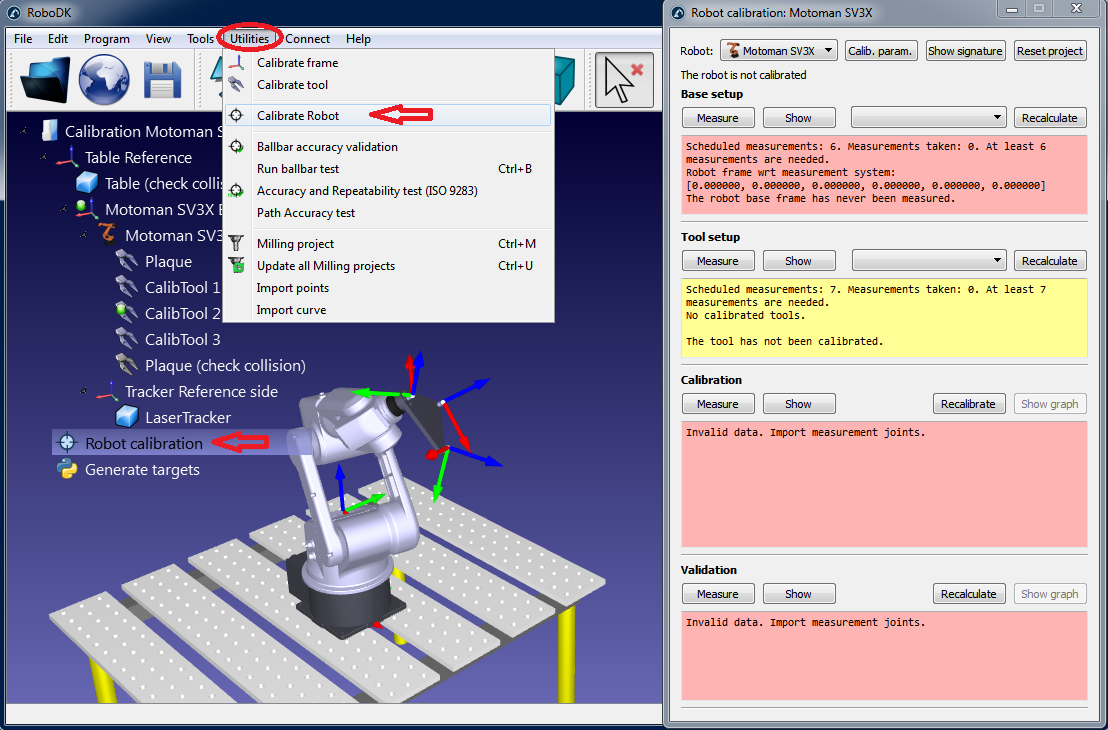
这个窗口现在可以关闭了。我们可以随时打开它,双击机器人标定站项目。

4.拯救车站。
一个。选择文件➔省站.
b。提供一个文件夹和文件名。
c。选择保存。生成一个新的RDK文件(RoboDK站文件)。
我们可以随时通过打开RDK文件(在Windows上双击该文件)恢复站点修改。
仔细检查以下细节非常重要:
1.校准工具命名为“CalibTool id”,id是从1开始的数字(如果有3个校准工具,我们必须有“CalibTool 1”,“CalibTool 2”和“CalibTool 3”)。
2.的测量参考框架直接取决于机器人基座。
现在,我们可以使用这个参考系的估计值。
3.的跟踪参考直接取决于测量参考.跟踪器参考点必须是激光跟踪器相对于测量参考点的近似位置。
4.的机器人标定项目存在于站中,我们计划进行的所有测量都是无碰撞的,并且可以通过激光跟踪器看到(为每组测量选择显示)。
5.如果我们想要自动检查碰撞,我们必须使用name标签。碰撞在我们想要用来检查碰撞的每个对象中。建议使用比被校准工具大25%左右的工具进行碰撞检查,以安全避免碰撞。
成功完成机器人校准需要四组测量:
1.基础设置:需要移动轴1和轴2进行6次(或更多)测量以放置相对于机器人的校准基准。选择显示在校准设置窗口中,机器人将沿着序列移动。
2.工具设置:需要7次或更多的测量来校准刀具法兰和刀具目标(移动轴5和6)显示机器人会沿着序列移动。
3.校准测量:需要60次或更多的测量来校准机器人。这些测量可以随机放置在机器人工作空间中,并且不会与周围物体发生碰撞。
4.验证测量(可选):尽可能多的测量可以用来验证机器人的精度。这些测量仅用于验证机器人的准确性,而不是校准机器人。
前两组测量是由RoboDK自动生成的。选择显示机器人将按照这个顺序(如下图所示)。如果需要更改顺序,请选择测量,选择将校正测量结果导出为CSV文件出口数据.此文件可以使用Excel工作表编辑,并通过单击重新导入导入数据.
最后两组测量(校准和验证)可以使用名为的宏脚本生成![]() 创建测量.当我们启动机器人校准项目时,这个宏脚本会自动添加到工作站。双击宏以执行它。这个宏是一个Python程序,指导用户定义以下设置:
创建测量.当我们启动机器人校准项目时,这个宏脚本会自动添加到工作站。双击宏以执行它。这个宏是一个Python程序,指导用户定义以下设置:
●度量的数量:要生成的度量的数量。默认情况下,使用80次测量,因为机器人校准至少需要60次测量。
●参考位置:参考位置必须是机器人的一个位置,在这个位置上,刀具面对跟踪器,有可见的目标。
●关节极限:必须提供关节下限和上限。
●笛卡尔极限:我们可以提供关于机器人参照系的笛卡尔极限(X,Y,Z值)。
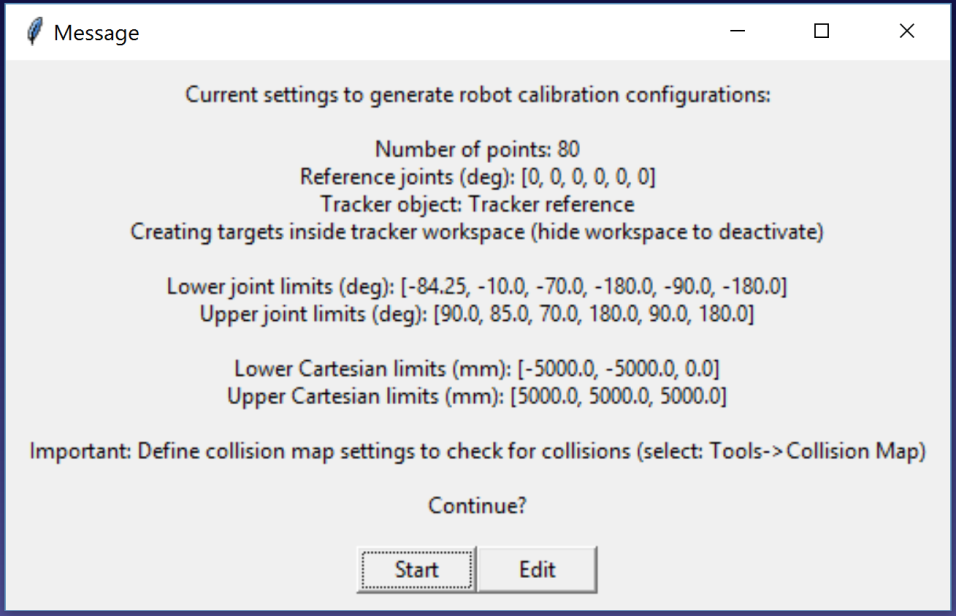
该脚本自动生成工具面对跟踪器以及尊重关节和笛卡尔约束的测量值。在参考位置上,允许围绕跟踪器的方向旋转+/-180度。此外,关节运动序列没有碰撞,并且在测量工作空间内(如果工作空间设置为可见)。下面的图像显示了在自动序列开始之前呈现给用户的摘要。该序列可能需要5分钟才能完成。
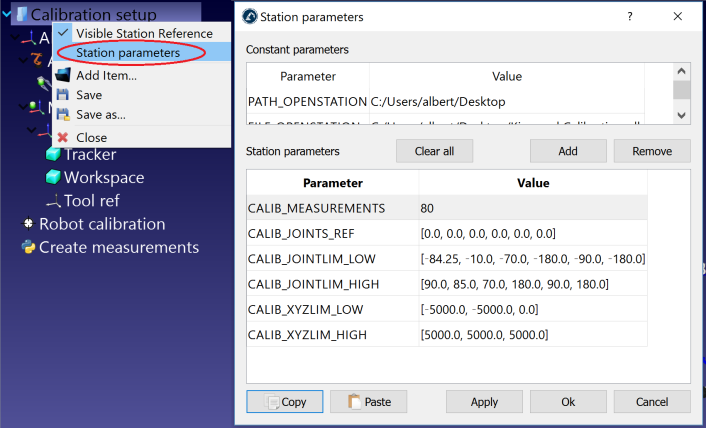
如果需要,我们可以通过右键单击创建测量脚本和选择编辑脚本,然后修改算法的附加参数。脚本自动将用户输入保存为站点参数。我们可以查看,编辑或删除这些设置,通过右键单击电台和选择站参数,如下图所示。
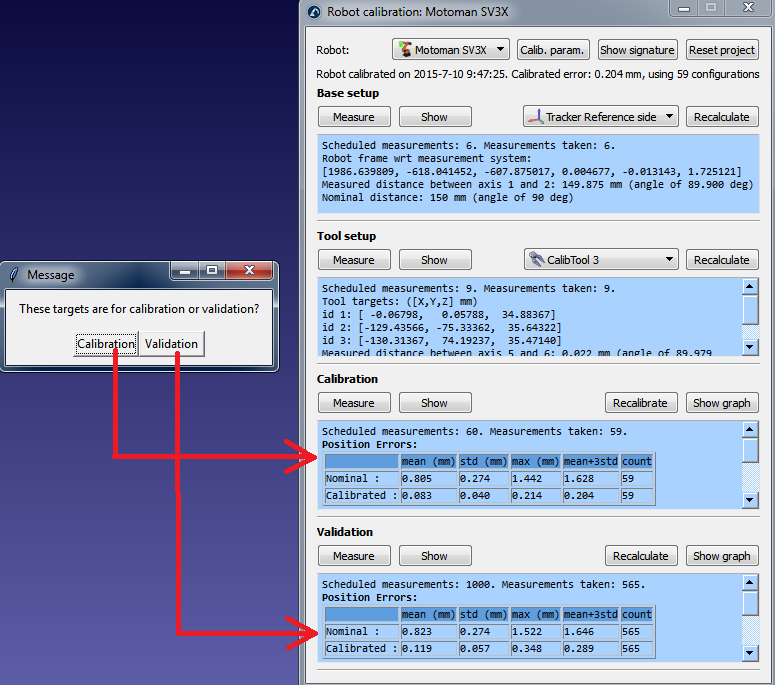
算法完成后将弹出一条新消息。我们可以选择“校准”,使用60个测量值对机器人进行校准。我们可以重新执行相同的脚本来生成另一组用于验证的度量。这一步是可选的,但为了验证目的,建议进行80次测量。
最后,还可以通过选择导入手动选择的配置导入数据(在测量菜单)。可以导入CSV文件或TXT文件作为Nx6矩阵,其中N为配置个数。
