机器人校准(激光跟踪仪)
成功完成机器人校准需要四组测量:
1.基础设置:需要移动轴1和轴2进行6次(或更多)测量以放置相对于机器人的校准基准。选择显示在校准设置窗口中,机器人将沿着序列移动。
2.工具设置:需要7次或更多的测量来校准刀具法兰和刀具目标(移动轴5和6)显示机器人会沿着序列移动。
3.校准测量:需要60次或更多的测量来校准机器人。这些测量可以随机放置在机器人工作空间中,并且不会与周围物体发生碰撞。
4.验证测量(可选):尽可能多的测量可以用来验证机器人的精度。这些测量仅用于验证机器人的准确性,而不是校准机器人。
前两组测量是由RoboDK自动生成的。选择显示机器人将按照这个顺序(如下图所示)。如果需要更改顺序,请选择测量,选择将校正测量结果导出为CSV文件出口数据。此文件可以使用Excel工作表编辑,并通过单击重新导入导入数据。
最后两组测量(校准和验证)可以使用名为的宏脚本生成![]() 创建测量。当我们启动机器人校准项目时,这个宏脚本会自动添加到工作站。双击宏以执行它。这个宏是一个Python程序,指导用户定义以下设置:
创建测量。当我们启动机器人校准项目时,这个宏脚本会自动添加到工作站。双击宏以执行它。这个宏是一个Python程序,指导用户定义以下设置:
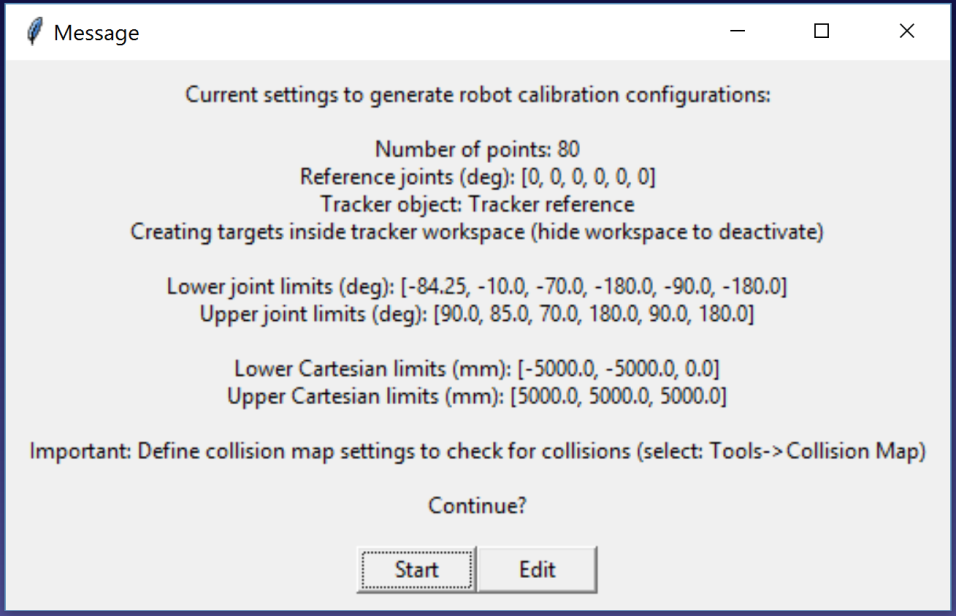
●度量的数量:要生成的度量的数量。默认情况下,使用80次测量,因为机器人校准至少需要60次测量。
●参考位置:参考位置必须是机器人的一个位置,在这个位置上,刀具面对跟踪器,有可见的目标。
o关节极限:必须提供关节下限和上限。
o笛卡尔极限:我们可以提供关于机器人参照系的笛卡尔极限(X,Y,Z值)。
该脚本自动生成工具面对跟踪器以及尊重关节和笛卡尔约束的测量值。在参考位置上,允许围绕跟踪器的方向旋转+/-180度。此外,关节运动序列没有碰撞,并且在测量工作空间内(如果工作空间设置为可见)。下面的图像显示了在自动序列开始之前呈现给用户的摘要。该序列可能需要5分钟才能完成。
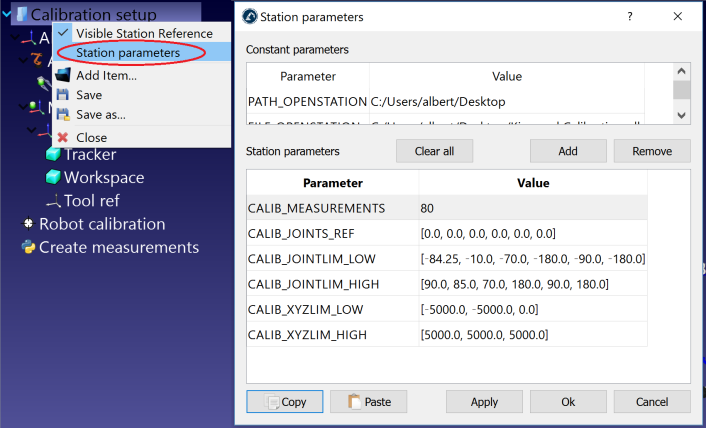
如果需要,我们可以通过右键单击创建测量脚本和选择编辑脚本,然后修改算法的附加参数。脚本自动将用户输入保存为站点参数。我们可以查看,编辑或删除这些设置,通过右键单击电台和选择站参数,如下图所示。
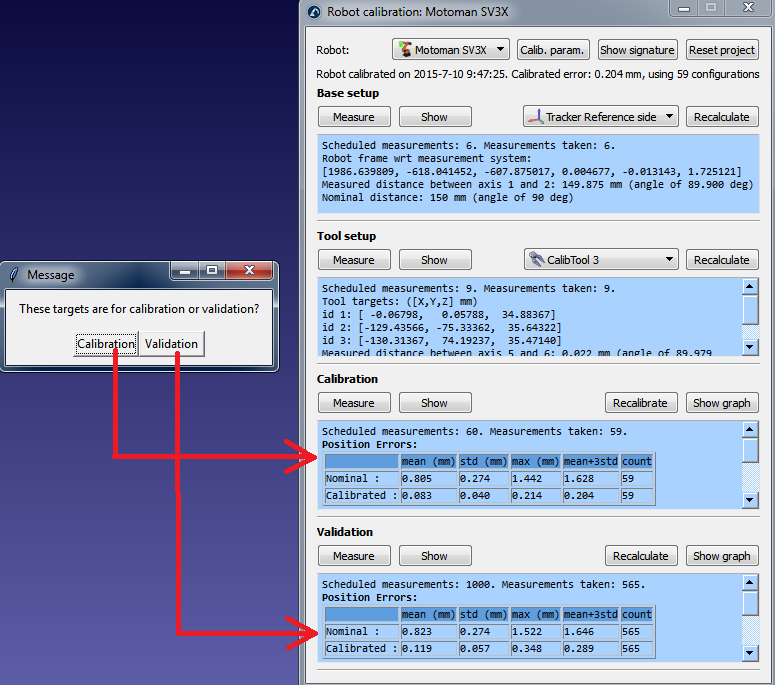
算法完成后将弹出一条新消息。我们可以选择“校准”,使用60个测量值对机器人进行校准。我们可以重新执行相同的脚本来生成另一组用于验证的度量。这一步是可选的,但为了验证目的,建议进行80次测量。
最后,还可以通过选择导入手动选择的配置导入数据(在测量菜单)。可以导入CSV文件或TXT文件作为Nx6矩阵,其中N为配置个数。
