机器人校准(激光跟踪仪)
机器人校准要求使用测量系统对机器人进行测量。为了进行这些测量,需要一个与计算机通信的法罗激光跟踪器。通信是通过可以在控制台模式下运行的驱动程序exe文件完成的。
例如,Faro提供了一个名为“跟踪工具”的免费应用程序。此应用程序可以初始化激光跟踪器并执行一些健康检查等。
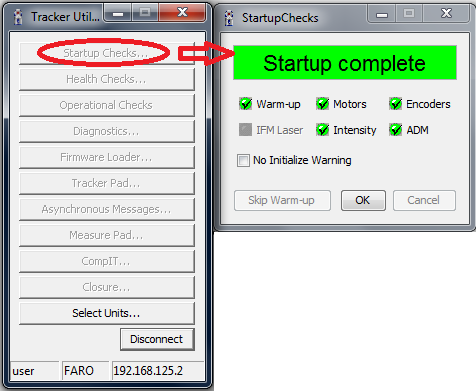
要初始化跟踪器,我们应该启动“跟踪工具”应用程序,使用跟踪器IP连接,然后选择“启动检查”。当跟踪器初始化时,我们应该在初始化之前将1.5“SMR”目标放置在“home”位置。否则初始化后绿灯闪烁,测量无效。
初始化完成后,我们应该读取“Startup complete”消息,如下图所示。

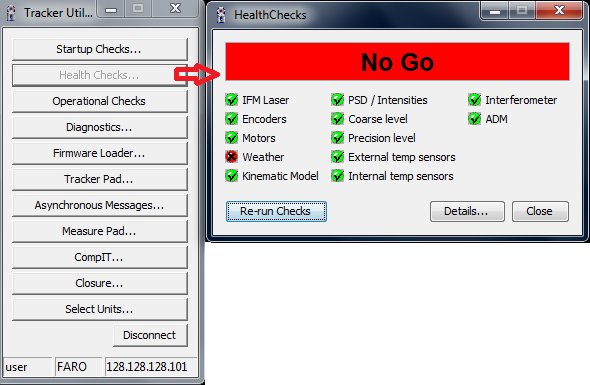
如果我们遇到跟踪器的问题,我们可以通过按“运行状况检查…”运行一些运行状况检查。接下来的两个图像分别显示了一个成功检查和一个失败检查。有时,在重新连接电缆并重新启动激光跟踪器后,问题就解决了。

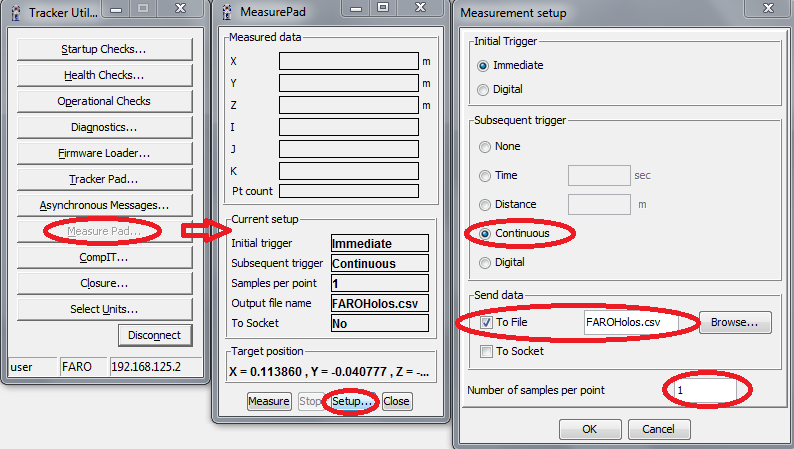
最后,我们可以使用“测量垫”进行一些测量。激光跟踪器可以跟踪目标并以1000 Hz的速率测量XYZ位置。如果我们设置1个样本每点和连续触发跟踪器将记录1000测量每秒在一个CSV文件。
我们可以使用这个功能来测量机器人的路径,并使用RoboDK的路径精度检查来检查沿着路径的精度,速度和加速度。