RoboDK TwinTool
使用RoboDK TwinTool校准,您可以自动校准工具中心点(TCP)。世界杯2022美洲预选赛直播工业机器人具有高度可重复性,但不精确。因此,通过对机器人和刀具的标定,可以提高工业机器人的精度。世界杯2022美洲预选赛直播在没有标定的情况下,机器人的精度很大程度上取决于机器人的品牌和型号。


RoboDK TwinTool可用于TCP (tool center point)的校准和验证。TwinTool可以精确校准具有球形或锥形几何形状的工具的TCP。
1.球形的工具➔刀具的中心已校准
2.锥形工具➔这个工具的尖端是校准过的
您必须安装RoboDK TwinTool App并具有兼容的传感器才能执行自动工具校准。
确保有以下几点:
1.一个或多个机械臂。
2.兼容的刻度盘指示器(也称为LVDT或线性计)。
3.必须安装RoboDK软件,并提供相应的自动机器人校准许可证。
4.你需要兼容机器人司机对于你的机器人控制器。
5.安装RoboDK TwinTool App:
一个。2022世界杯国家队名单下载RoboDK TwinTool App(下载链接请联系RoboDK)
b。双击文件安装应用程序,并在RoboDK中打开它。
c。选择工具➔应用程序然后双击TwinTool查看TwinTool工具栏和菜单。
如果您无法看到TwinTool应用程序,您应该关闭RoboDK并以管理员权限再次启动RoboDK以正确安装应用程序。
RoboDK TwinTool支持多种线性测量传感器,包括Keyence, Mitutoyo, Sylvac等。一些通信协议包括USB, ethernet /IP和RS232。一个工业级线性量规传感器的大概价格是1500.00欧元。
线性量规传感器的精度应为0.005毫米或更好,行程为10毫米或更多。建议测量频率为每秒50个或以上。这个传感器不是由RoboDK提供或出售的。我们建议与您当地的经销商联系,以提供使用RoboDK TwinTool所需的传感器。
下面的列表显示了Keyence线性量规的样品订单:
●Keyence GT2-P12 -铅笔式量规
●GT2-UB1 - USB连接单元
●OP-87716 -电缆扩展
●OP-76875 -建议安装支架的压力表
●25mm平接触点,需要M2.5x0.25螺纹(Keyence不提供)
下面的列表显示了三丰线性计的样品订单:
●三丰542-191 - LG 100表
●Mitutoyo 542-081A - EJ计数器+ AC
●Mitutoyo 21HZA149 - USB接口(也支持RS232)
●25mm平接触点,需要M2.5x0.25螺纹(三丰不提供)
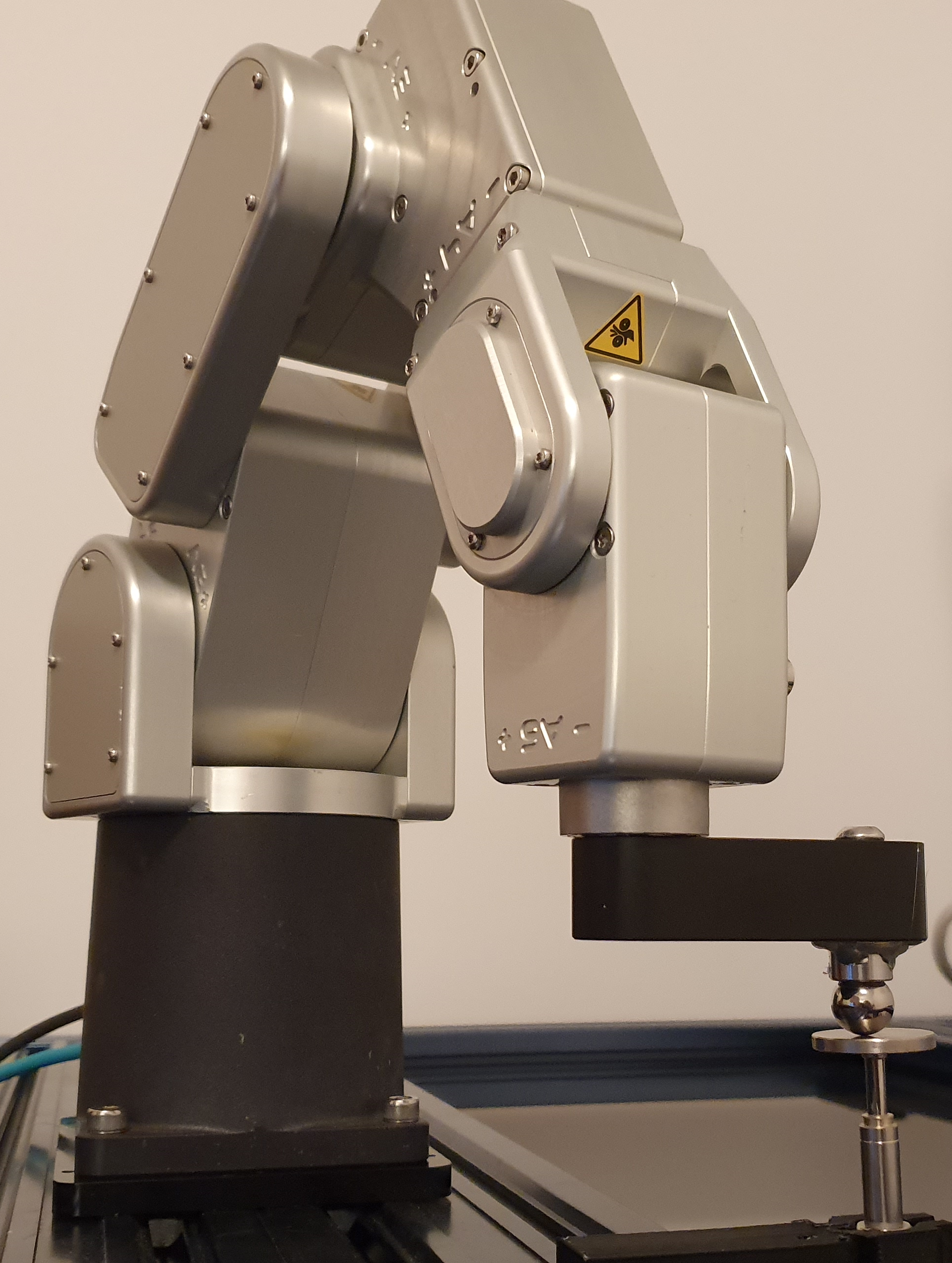
要使用TwinTool校准工具(TCP),您需要在RoboDK中加载机器人,并确保传感器和机器人已连接。您可以选择通过添加对象和工具的3D模型来建模单元格。这将允许自动避免碰撞。
1.装载机器人:
一个。选择文件➔开放网上图书馆。在线图书馆将出现在RoboDK中。
b。使用过滤器找到你的机器人。
c。选择开放自动将机器人装入你的RoboDK工作站。
d。或者,直接从库下载机器人文件(2022世界杯国家队名单//www.sinclairbody.com/library),并使用RoboDK (.robot文件)打开该文件。
2.连接传感器:
一个。将传感器连接到计算机上。
b。选择TwinTool➔![]() 衡量。
衡量。
c。确保传感器正在测量并且测量结果稳定。
3.连接机器人:
一个。选择连接➔连接机器人。
b。输入机器人IP和端口。
c。选择连接。
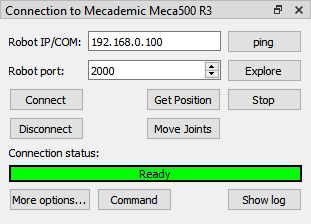
4.选择得到的位置从机器人连接面板。这一步将更新机器人在RoboDK中的位置。
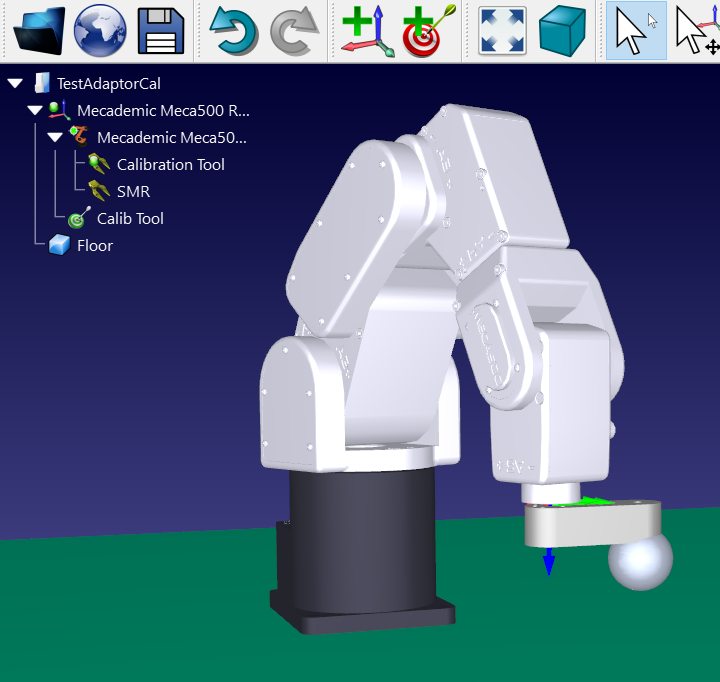
您可以选择遵循这些步骤来正确地为单元格的3D环境建模。
1.加载工具的3D模型并在RoboDK中创建工具。更多资料请参阅创建工具部分。
2.加载任何3D文件来建模单元格。您可以加载3D STEP, IGES, STL文件。更多信息请参见入门部分。
要开始校准程序,只需选择TwinTool➔![]() TwinTool向导。
TwinTool向导。
启动向导后,将引导您完成![]() 校准,
校准,![]() 验证,或
验证,或![]() 模拟设置。这包括建立与传感器的连接,确保机器人的有效状态和检查关键参数。按照屏幕上的步骤操作,如果需要其他详细信息,请参考工具提示。
模拟设置。这包括建立与传感器的连接,确保机器人的有效状态和检查关键参数。按照屏幕上的步骤操作,如果需要其他详细信息,请参考工具提示。

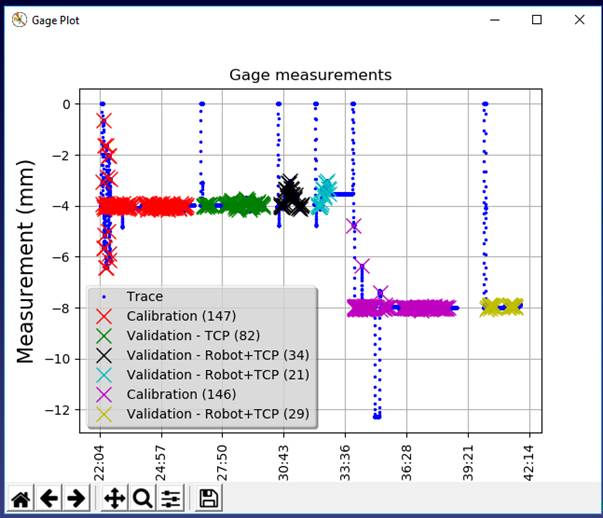
校准序列完成后,您将被引导到![]() 分析选项卡。从那里,您可以可视化当前和以前的校准和验证,删除或重新应用校准,等等。
分析选项卡。从那里,您可以可视化当前和以前的校准和验证,删除或重新应用校准,等等。
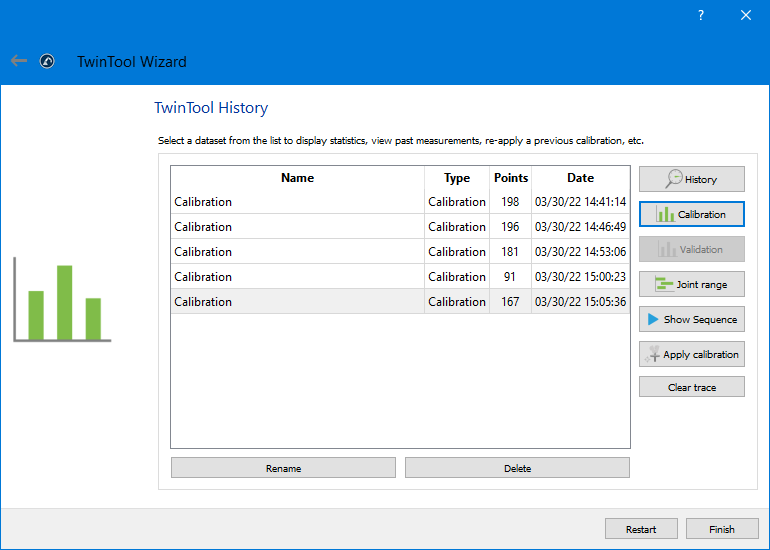
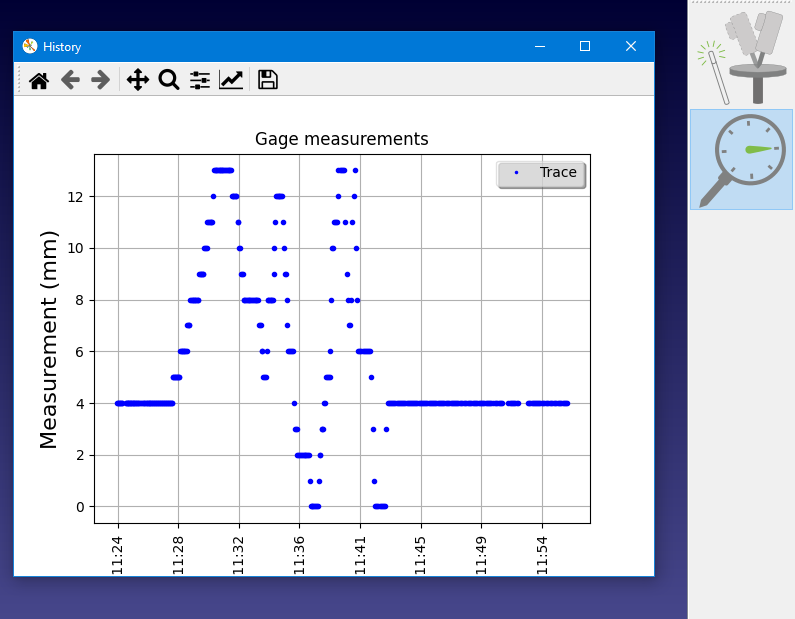
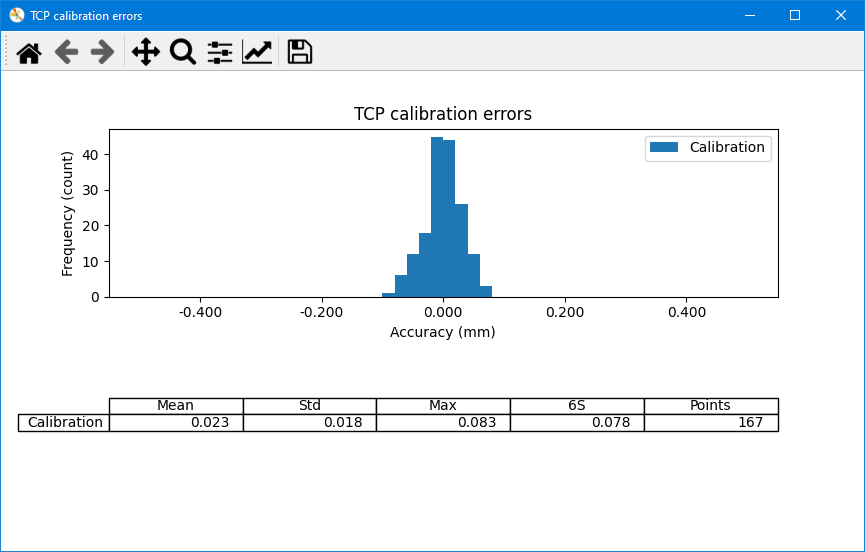
通过点击校准按钮,您将看到显示校准结果的图表。刀具中心点(TCP)是利用机器人的标称运动学来计算的。
运行校准序列后,可以运行一些验证测试。这些验证测试可以在传感器的相同位置或不同位置进行。
选择![]() 验证从巫师那里。标定数据将用于计算TCP(不包括机器人标定)。然后你会被引导到
验证从巫师那里。标定数据将用于计算TCP(不包括机器人标定)。然后你会被引导到![]() 分析选项卡。将显示计算出的TCP,并且一些统计信息将提供计算出的TCP的估计错误。
分析选项卡。将显示计算出的TCP,并且一些统计信息将提供计算出的TCP的估计错误。
选择验证显示有关结果的摘要和一些统计信息。这些统计值与传感器检测到的平面误差相对应。

本节描述了您可以修改的其他设置和选项,以更好地自定义校准和测试机器人精度。
选择TwinTool➔高级设置打开高级设置的完整列表。控件提示和设置了大多数这些设置向导。
