RoboDK插件融合360
Autodesk Fusion 360的RoboDK插件允许您将Autodesk Fusion 360 3D CAD/CAM建模功能与RoboDK结合起来,用于机器人仿真机器人加工和离线编程。2022世界杯8强赛时间
使用Fusion 360的RoboDK插件,您可以轻松地将在Fusion 360中创建的3D模型加载到RoboDK。这个插件允许您直接从Autodesk Fusion 360编程30多个不同的机器人制造商和400个机器人。
机器人可以很容易地编程为5轴机床,用于制造应用,如钻孔、焊接、修整、3D打印或机器人加工。有关详情,请参阅机器人加工部分。
的机器人后置处理器组显示了RoboDK支持的机器人品牌和机器人控制器的列表。也可以修改或创建新的后处理器来定制程序生成。
RoboDK插件融合是免费的,如果你有一个RoboDK许可证。

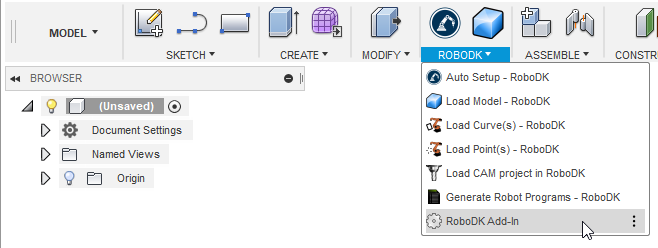
如果您已经安装了Autodesk Fusion 360和RoboDK,您可能已经安装并准备好了用于融合的RoboDK插件。融合360的RoboDK外接程序应该在工具栏中可见。
Autodesk Fusion 360的默认RoboDK工具栏包括用于CAD和CAM目的的7个命令的RoboDK专用工具栏。
·![]() 自动设置-此按钮允许您加载任何选定的几何图形(曲线或点)。你也可以选择曲面来提取曲线法线。几何图形将与3D模型一起加载在RoboDK中。
自动设置-此按钮允许您加载任何选定的几何图形(曲线或点)。你也可以选择曲面来提取曲线法线。几何图形将与3D模型一起加载在RoboDK中。
·![]() 负载部分-将3D模型从Fusion 360加载到RoboDK。曲线或点等特征不会被加载。
负载部分-将3D模型从Fusion 360加载到RoboDK。曲线或点等特征不会被加载。
·![]() 负载点-加载RoboDK中选择的所有点作为新对象。所有选定的曲面将用于计算点法线。这些法线很重要,因为它们定义了机器人的接近轴。
负载点-加载RoboDK中选择的所有点作为新对象。所有选定的曲面将用于计算点法线。这些法线很重要,因为它们定义了机器人的接近轴。
·![]() 负载曲线(s) -将RoboDK中选择的所有曲线加载为一个新项目。所有选定的曲面将用于计算曲线法线。这些法线很重要,因为它们将定义机器人的接近轴。
负载曲线(s) -将RoboDK中选择的所有曲线加载为一个新项目。所有选定的曲面将用于计算曲线法线。这些法线很重要,因为它们将定义机器人的接近轴。
·![]() 设置-打开默认设置窗口。
设置-打开默认设置窗口。
·![]() 负载凸轮项目-在RoboDK中加载加工项目。如果使用多个工具进行加工,RoboDK将自动分割程序,为每个工具设置一个项目。这种行为可以在Tools-Options-CAM。
负载凸轮项目-在RoboDK中加载加工项目。如果使用多个工具进行加工,RoboDK将自动分割程序,为每个工具设置一个项目。这种行为可以在Tools-Options-CAM。
·![]() 生成机器人程序—生成RoboDK项目中所有可用的程序。
生成机器人程序—生成RoboDK项目中所有可用的程序。
两者的主要区别自动设置和负载曲线(s)或加载点(年代)自动设置加载部分并创建一个新的曲线/点跟踪项目。使用负载曲线(s)或负载点(s)更快,只会更新RoboDK中现有的几何特征,保持以前定义的设置。
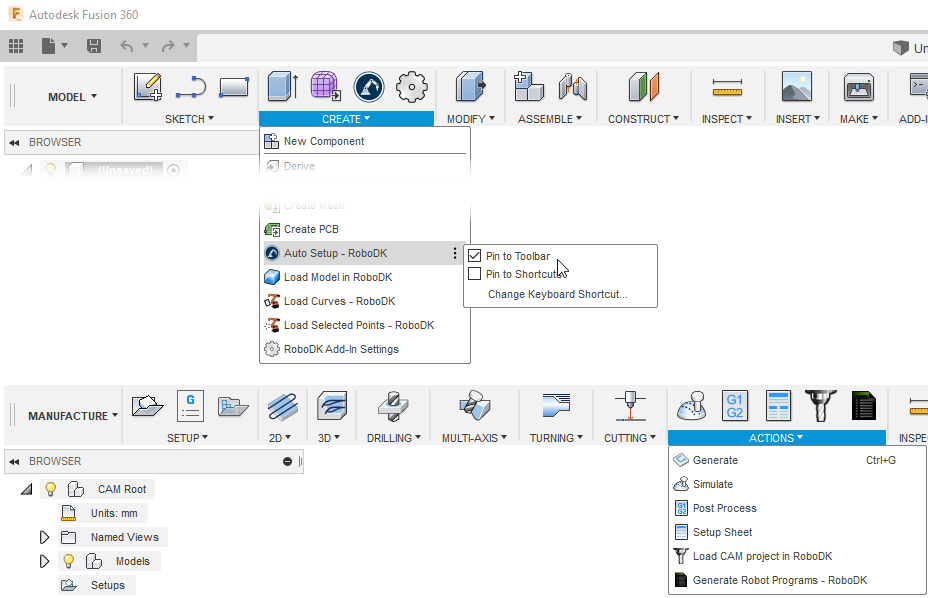
的下面还可以找到5个命令创建从模型工作空间(CAD功能)和2个命令下行动从制造工作空间(CAM功能)。
您可以通过选择设置按钮。
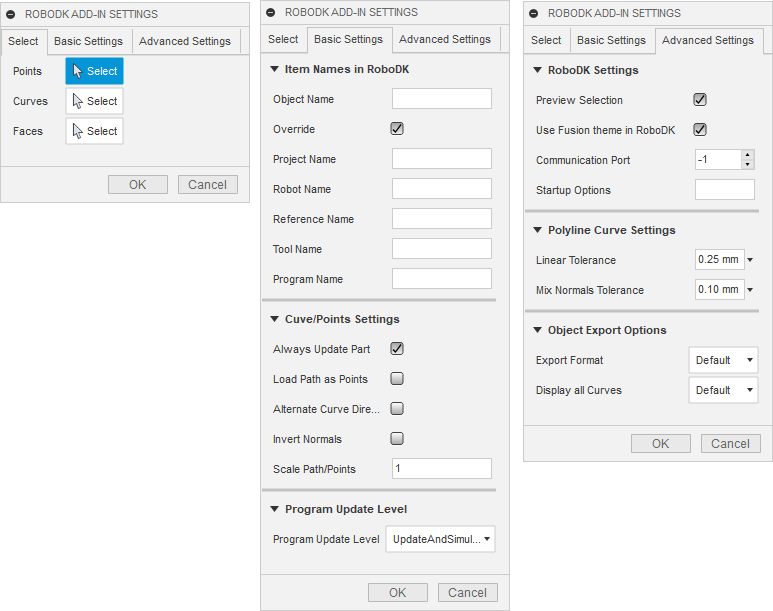
基本设置:
·对象名称-设置将载入RoboDK的曲线/点对象的名称。如果此情况为空,则将使用部件或程序集文件的名称。
·覆盖,如果有名称匹配,覆盖之前在RoboDK中加载的对象。
·项目名称-设置RoboDK项目/站的名称/路径(。RDK文件)来使用。如果文件已经加载,它将使用现有的项目。如果RoboDK中打开的项目与文件名不匹配,如果指定了完整路径,则会打开项目。
·〇机器人名称设置将在RoboDK中使用的机器人的名称(如果您的项目中有多个机器人)。机器人名称必须与RoboDK站树中可见的名称匹配。保留此值为空(默认值)以使用第一个或唯一可用的机器人。
·参考名称-设置参考框架的名称,以放置相对于机器人的路径。名称应该与RoboDK站树中的可见名称匹配。如果没有提供名称,则活动参考系![]() 将被使用。
将被使用。
·工具名称-设置机器人沿着路径使用的工具(TCP)的名称。名称应该与RoboDK站树中的可见名称匹配。如果没有提供名称,则活动工具架![]() 将被使用。
将被使用。
·项目名称-设置将要生成的程序文件的名称。
·〇随时更新部件选中此选项将始终将3D模型从Fusion更新到RoboDK。这将在您选择曲线或点时更新部分。
·加载路径为点-选中此选项以将曲线转换为点,因此a点跟踪项目将在RoboDK中创建。这对于钻井等制造操作非常有用。取消选中此选项以将路径加载为曲线跟踪项目。
·交替曲线方向-检查此选项,以在每次通过时交替移动方向(锯齿模式)。
·法线反转-选中此选项可反转计算的曲面法线。这将翻转机器人的工具方向。
高级设置:
·在RoboDK中使用融合360主题用Autodesk Fusion 360主题启动RoboDK。这包括改变3D导航的鼠标行为和背景颜色。这些设置可以在RoboDK菜单中更改:Tools-Options。
·通讯端口-设置与RoboDK通信的通信端口。如果使用不同的端口,RoboDK的多个实例可以同时运行,并使用不同的设置。当该值设置为-1(默认)时,使用默认端口(20500)。
·启动选项-设置参数,在RoboDK第一次启动时传递给它。例如,要安静地启动RoboDK,可以设置“/NOSPLASH /NOSHOW /HIDDEN”。即使不显示RoboDK,仍然可以生成程序。更多资料,请浏览命令行部分的RoboDK API。
·线性公差(mm) -将分割曲线的线性精度设置为一组点。
·混合法线公差(mm) -设置用于在多个表面之间混合正常计算的距离公差。
·导出格式-选择导出格式,在RoboDK中加载部件。
·显示所有物体曲线- - - - - -显示在RoboDK中加载的曲线,即使它们没有被选中。您可以在RoboDK(工具-选项-显示-显示曲线)中更改此设置。
本节展示了将Autodesk Fusion 360项目与RoboDK结合起来用于机器人仿真和离线编程的基本示例。2022世界杯8强赛时间
下面的例子展示了如何为激光切割应用程序编程一个工业机器人。世界杯2022美洲预选赛直播
下面的示例展示如何为点胶应用程序创建机器人模拟和编程。在这个例子中,机器人拿着零件,工具是静止的。这种类型的设置也被称为远程TCP。
下面的例子展示了如何为去毛刺应用程序编程机器人。本例需要使用Fusion的制造工作台(CAM/加工工具),并将帮助您使用Fusion和RoboDK进行机器人加工应用。
这些是为Autodesk Fusion 360设置RoboDK插件的手动步骤。如果在默认情况下没有使用RoboDK安装程序自动安装用于Fusion的RoboDK插件,您应该遵循以下步骤:
1.安装欧特克融合(如果你还没做过)。
2.2022世界杯国家队名单下载和安装RoboDK。
3.2022世界杯国家队名单下载Autodesk Fusion 360 RoboDK插件。
4.解压其中的内容C: \ RoboDK \ \ Plugin-Fusion360 \ RoboDK \
在Fusion 360中安装RoboDK插件:
5.打开Autodesk Fusion 360。
6.选择Add-Ins - scripts和Add-Ins (Shift+S),从模型工作区。

7.选择Add-Ins选项卡
8.选择绿色的+按钮

9.输入如下路径:
C: \ RoboDK \ \ Plugin-Fusion360 \ RoboDK \
10.检查选项开机运行用RoboDK插件启动Fusion 360
11.选择运行
的工具栏中,您应该看到一个名为RoboDK的工具栏模型工作区。
类下所有与cad相关的命令创建工具栏(从模型工作空间下的所有CAM相关命令行动工具栏(从制造工作空间)。