托盘包装
您可以使用码垛插件实现自动码垛。码垛插件将帮助您使用可视化和直观的界面快速创建码垛程序。
本示例将指导您完成从基本码垛站到仿真,最后到可以在机器人控制器中加载和执行的真实机器人程序所需的步骤。
您应该在RoboDK中加载码垛插件以启用码垛特性。
按照以下步骤启用码垛插件:
1.选择工具➔插件.
2.双击PluginPalletizing如果未启用。
你应该看到托盘包装菜单项和工具栏中的新码垛图标。
要创建码垛项目,首先需要在RoboDK中正确设置站点。
按照以下步骤正确设置您的工作站:
1.您应该加载一个机器人、一个工具(TCP)、一个用来拾取箱子的参考框架(Pick_Frame)和一个用来构建托盘的参考框架(托盘)。
2.我们还建议您进口您希望堆叠的箱子和您想要堆叠的托盘。或者,您可以在RoboDK库中找到标准大小的盒子。
3.栈板必须与堆叠架(栈板)的X+和Y+轴对齐。

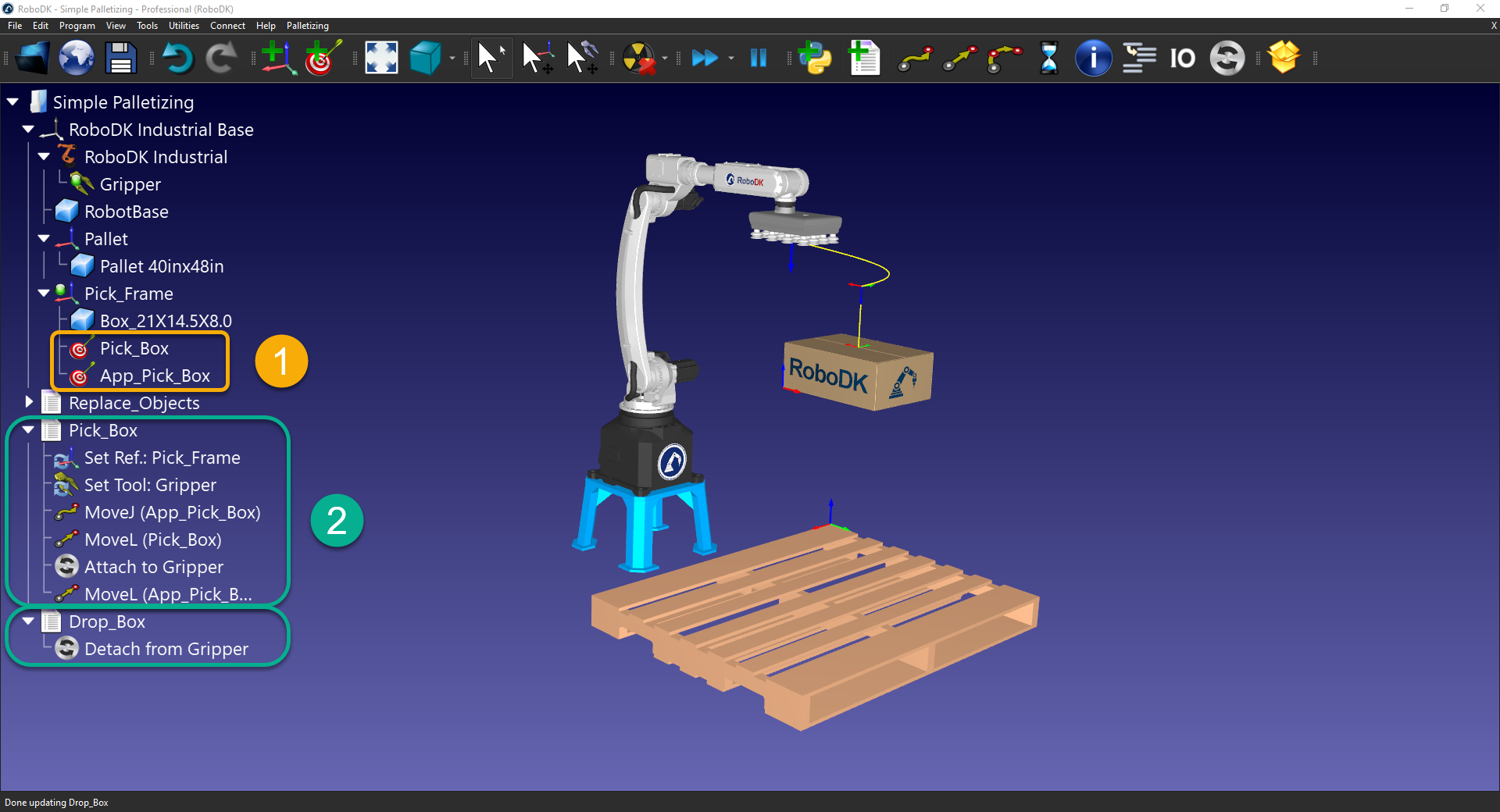
码垛向导要求您提供一个子程序来选择一个新箱子,并提供一个程序来放下这个箱子。我们建议您先创建这些。
按照以下步骤创建一个拾取程序(Pick_Box)和删除程序(Drop_Box):
1.创建一个选择目标您将选择新的传入框。我们还建议您添加一个接近点。
2.创建一个Pick_Box和Drop_Box程序。