托盘包装
一旦创建了码垛项目,就可以生成需要在机器人控制器上执行的机器人程序。
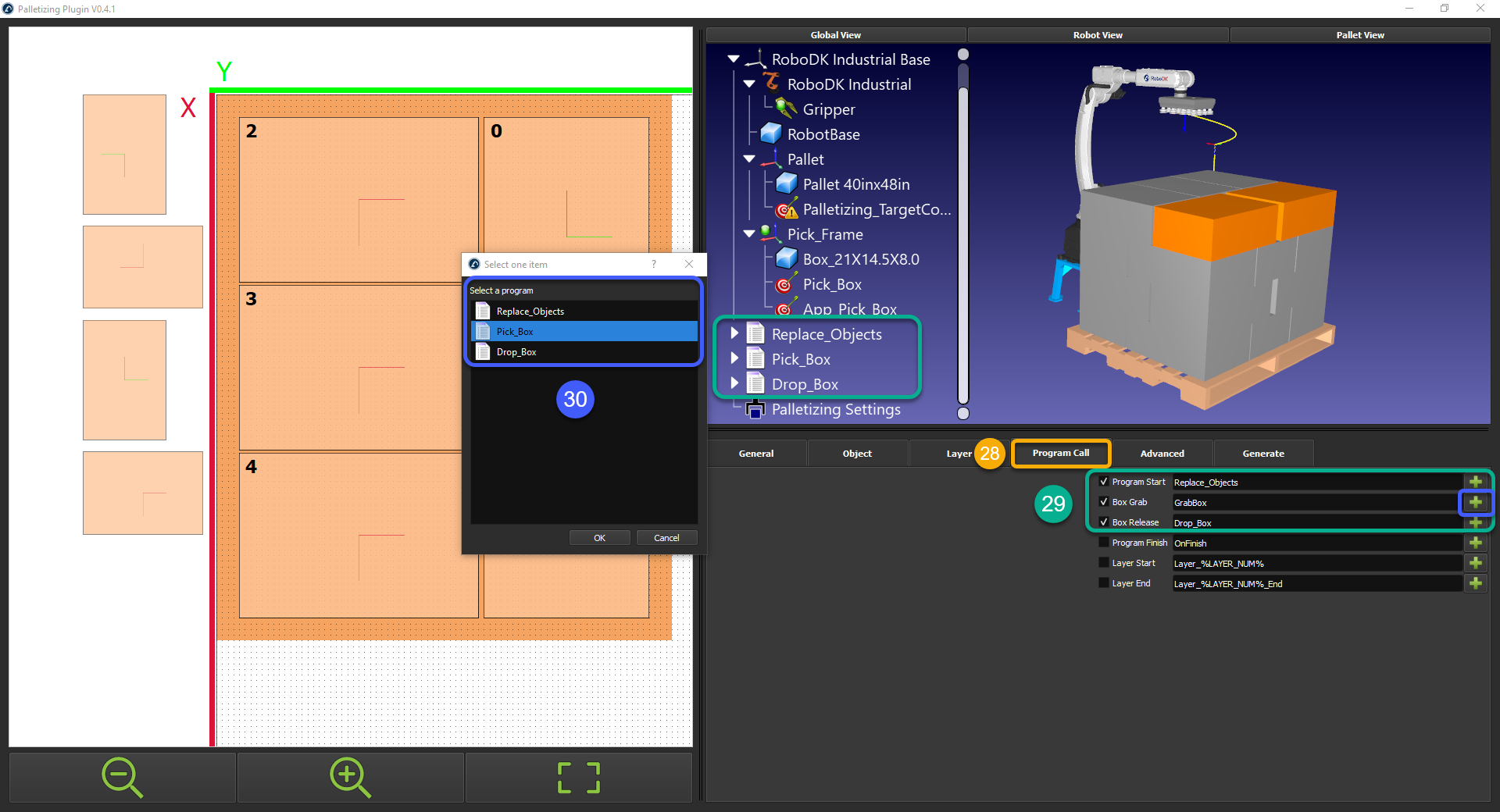
28.移动到“程序调用选项卡在程序开始时添加特定事件;当机器人需要拿起一个盒子或者当它需要放下一个盒子时。
29.在这个例子中,激活“程序开始”、“盒子里抓,和盒子释放”。
30.您可以输入要使用的子程序的名称,也可以按“+按钮从列表中选择。
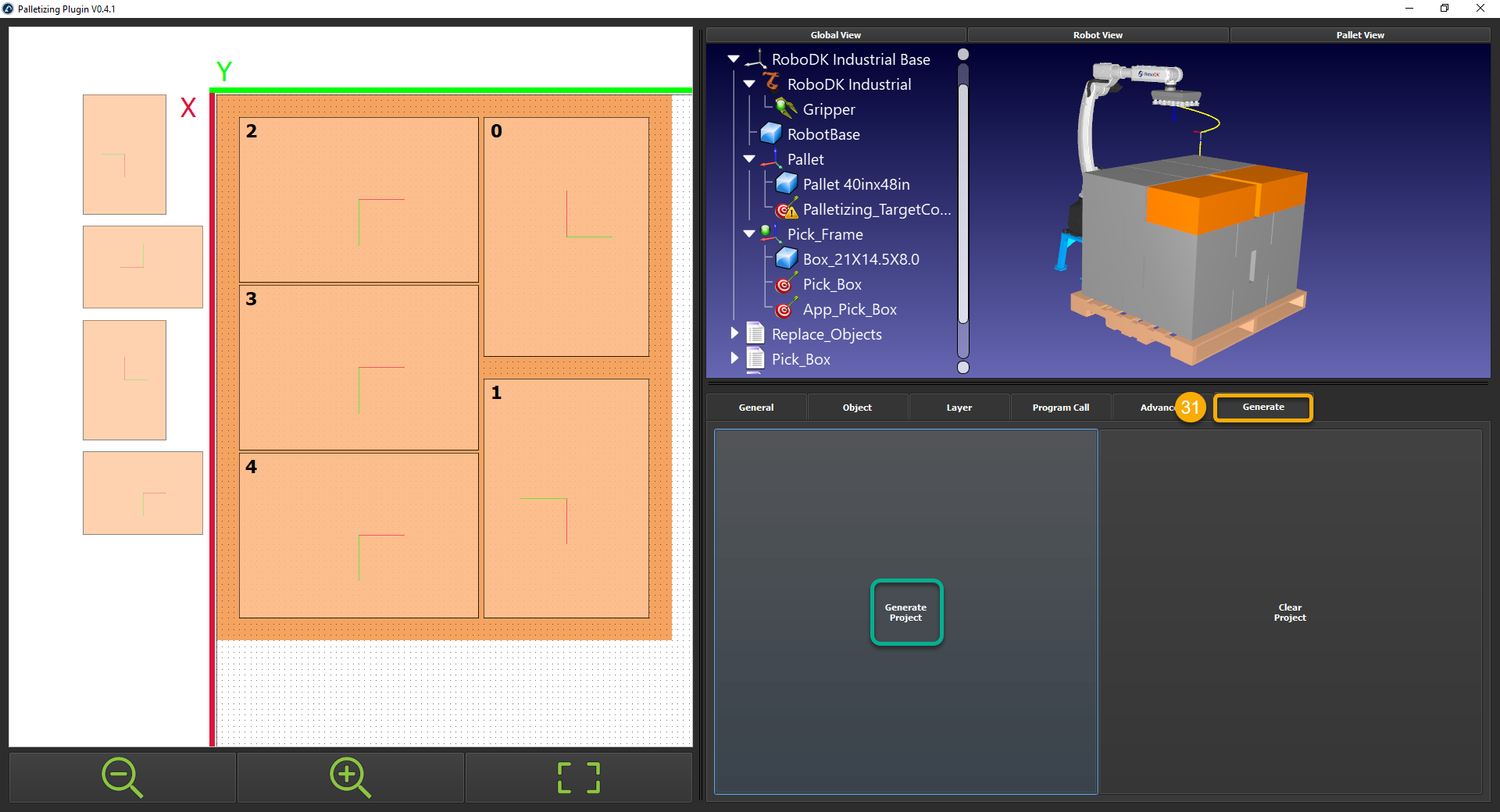
31.移动到“生成,并生成程序。关闭码垛窗口返回RoboDK的界面。
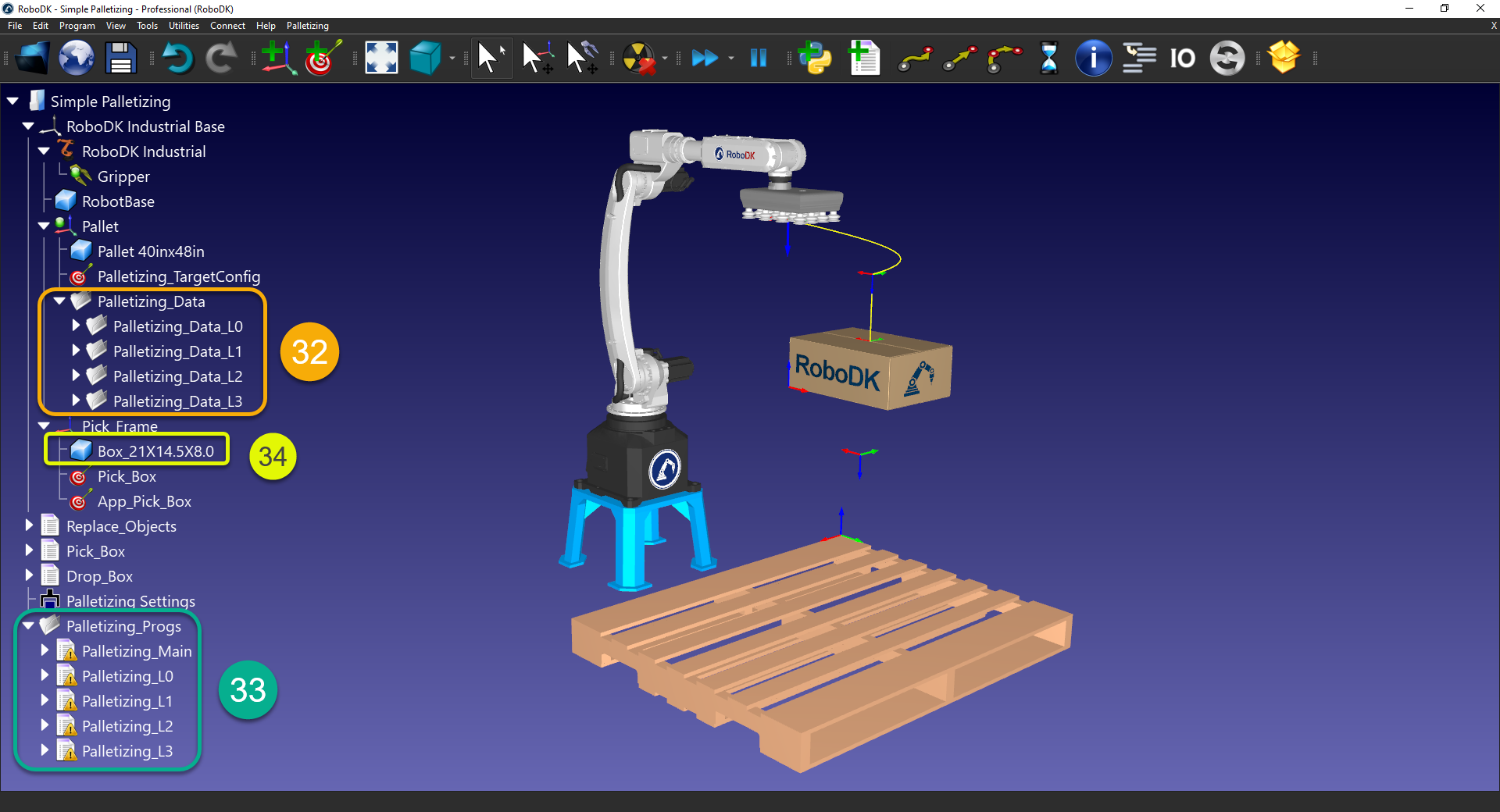
码垛插件在您的站点文件夹中创建了许多项目,包括所有要达到的目标。
32.文件夹下的"托盘框架包含目标。默认情况下,它们是不可见的,但可以像其他目标一样设置为可见。
33.一个文件夹将包含主码垛程序和每层一个子程序。
34.您需要创建足够的箱子来满足码垛项目。复制和粘贴您的盒子,尽可能多的盒子,你需要的。
35.双击Palletizing_Main来运行主程序。

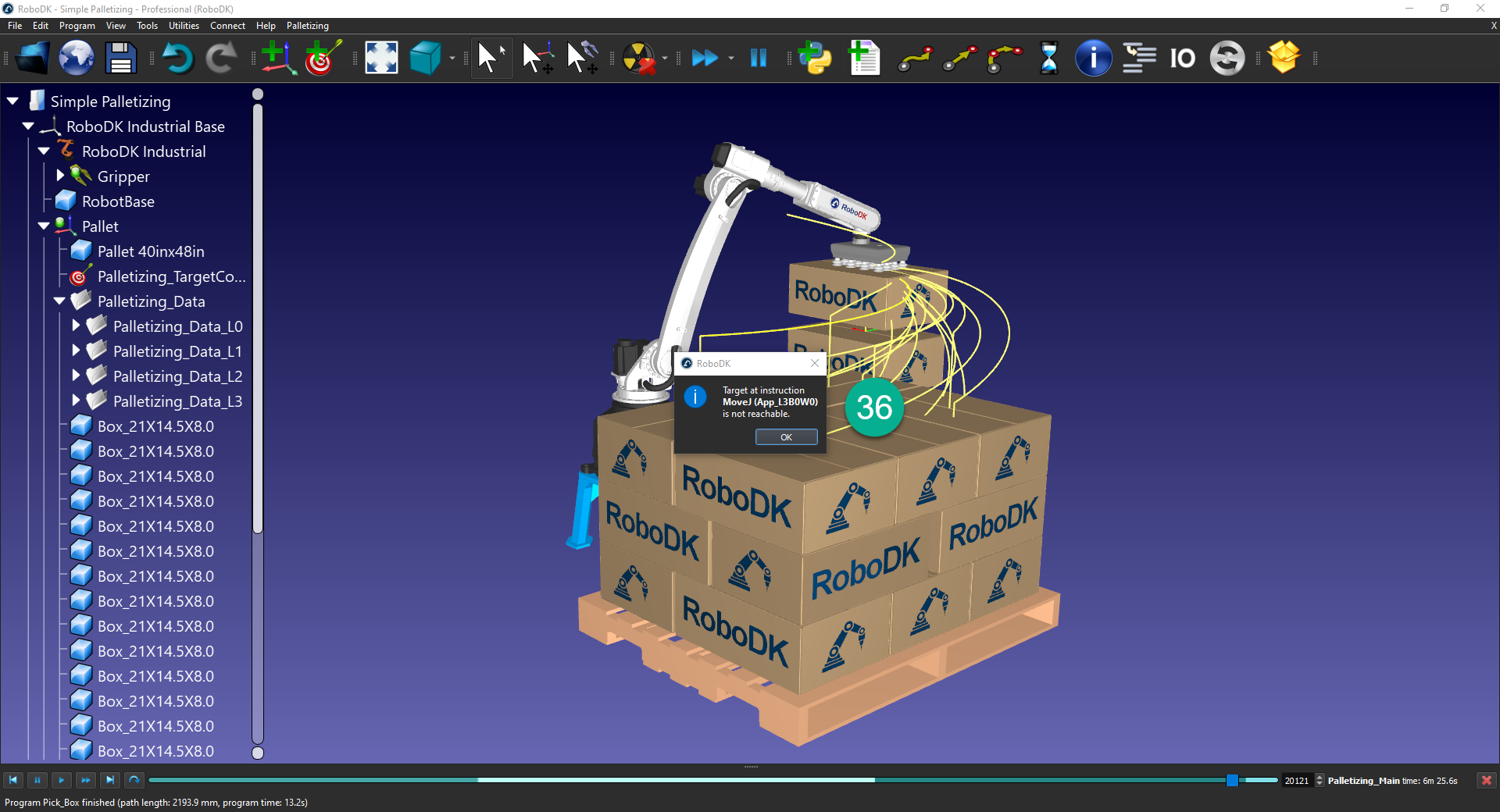
36.如果目标无法到达,RoboDK会通知您(如下图所示)。
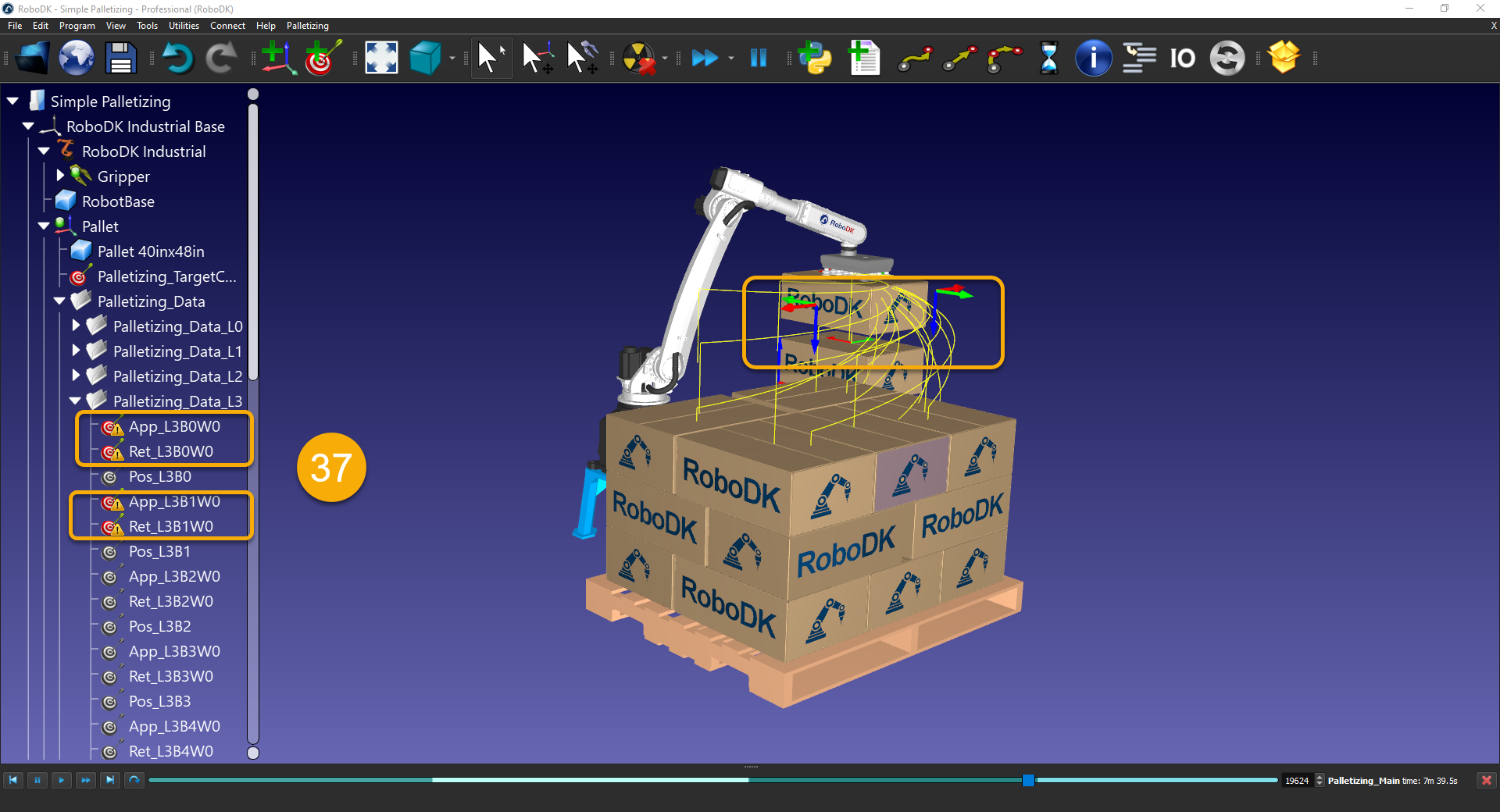
37.在列表中找到无法到达的目标。如果……托盘"参考系被激活,你应该看到警告标志在无法到达的目标上(如下图所示)。
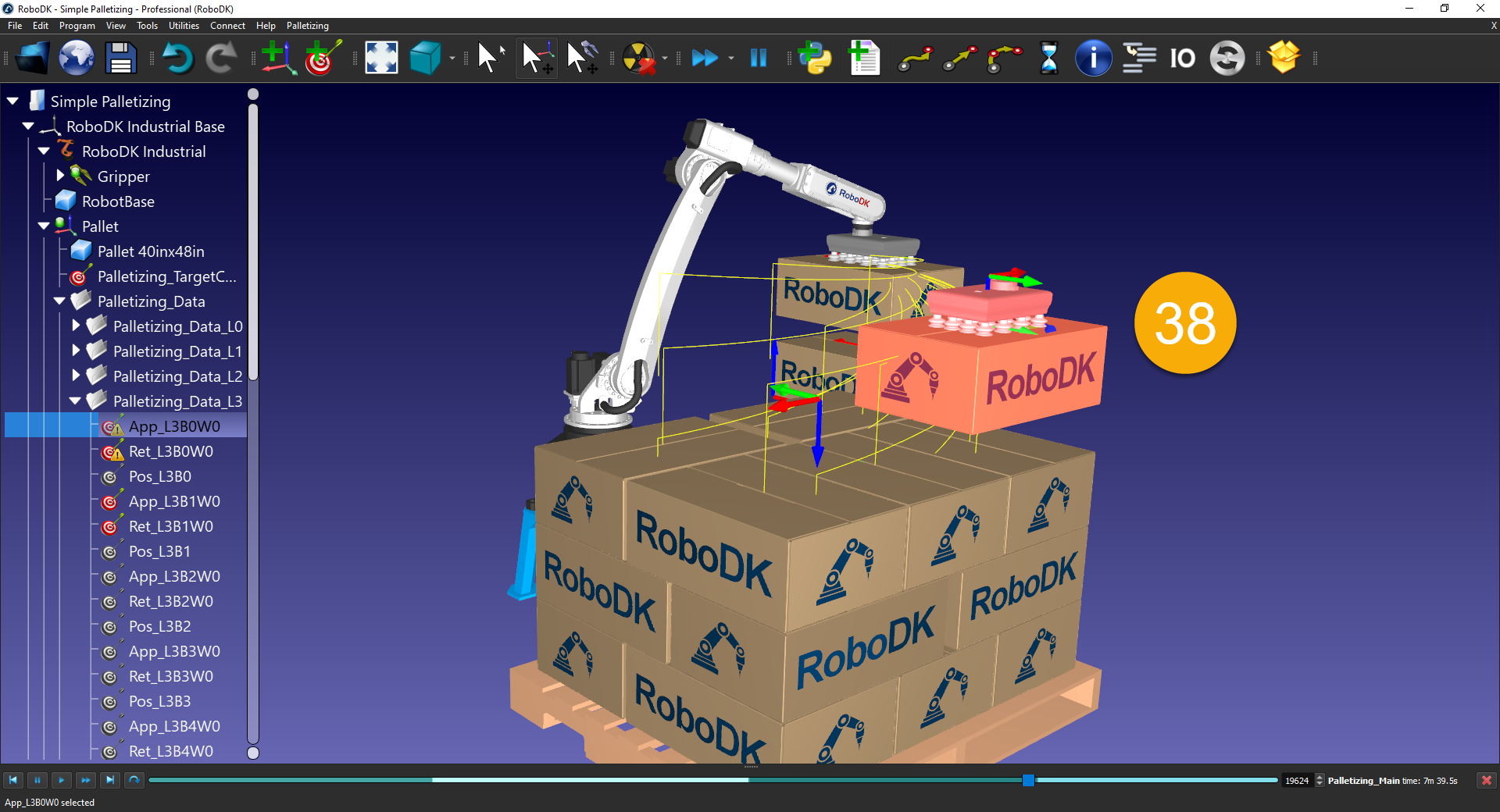
38.使无法到达的目标可见,然后按"Alt然后把它们移到一个可以到达的地方。
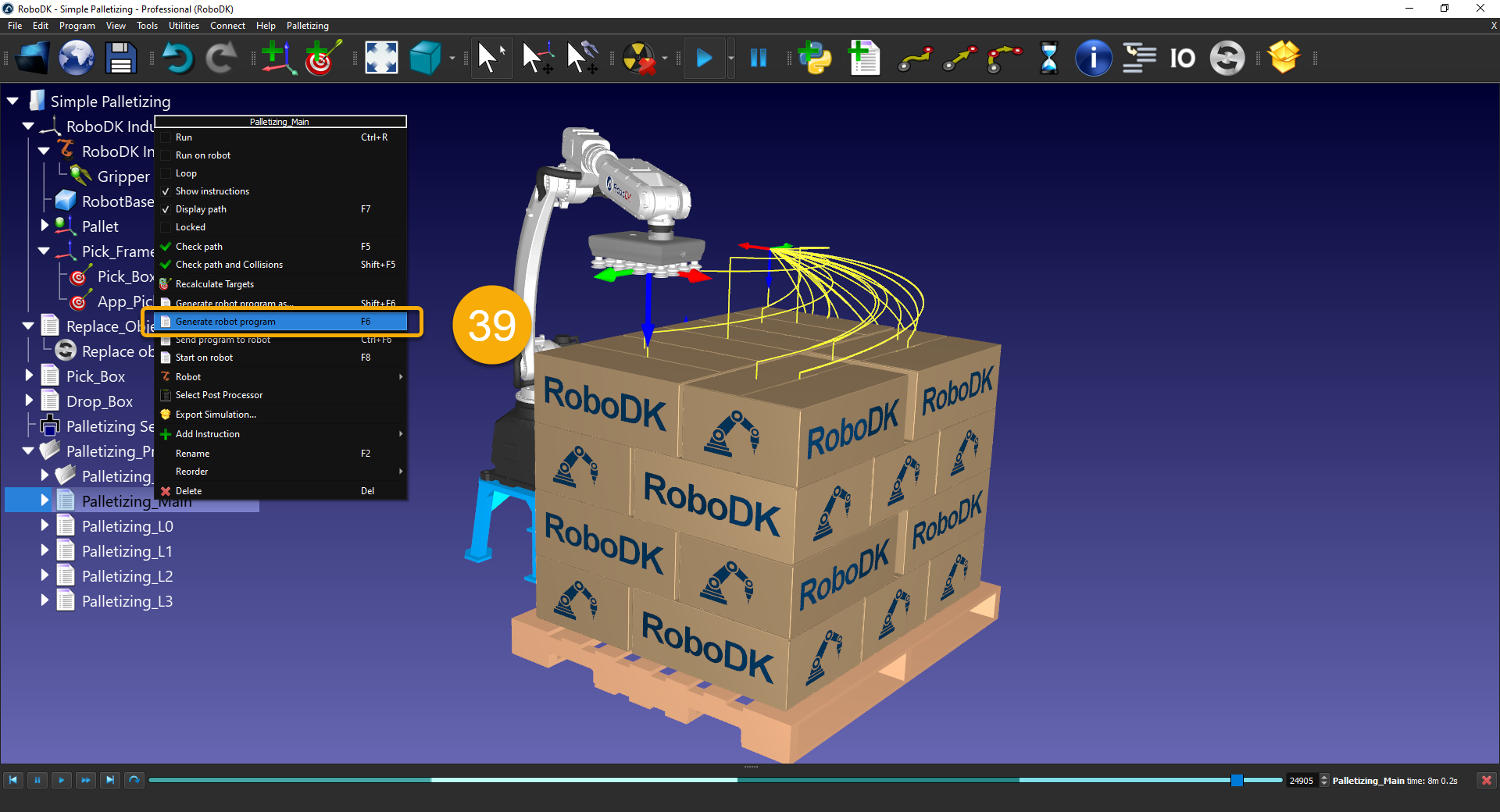
39.右键单击Palletizing_Main“编程并选择”生成机器人程序来创建机器人控制器可以执行的程序。