托盘包装
码垛项目将帮助您自动化机器人码垛过程。本节描述您可以自定义的码垛设置的主要特性。
按照以下步骤创建码垛项目:
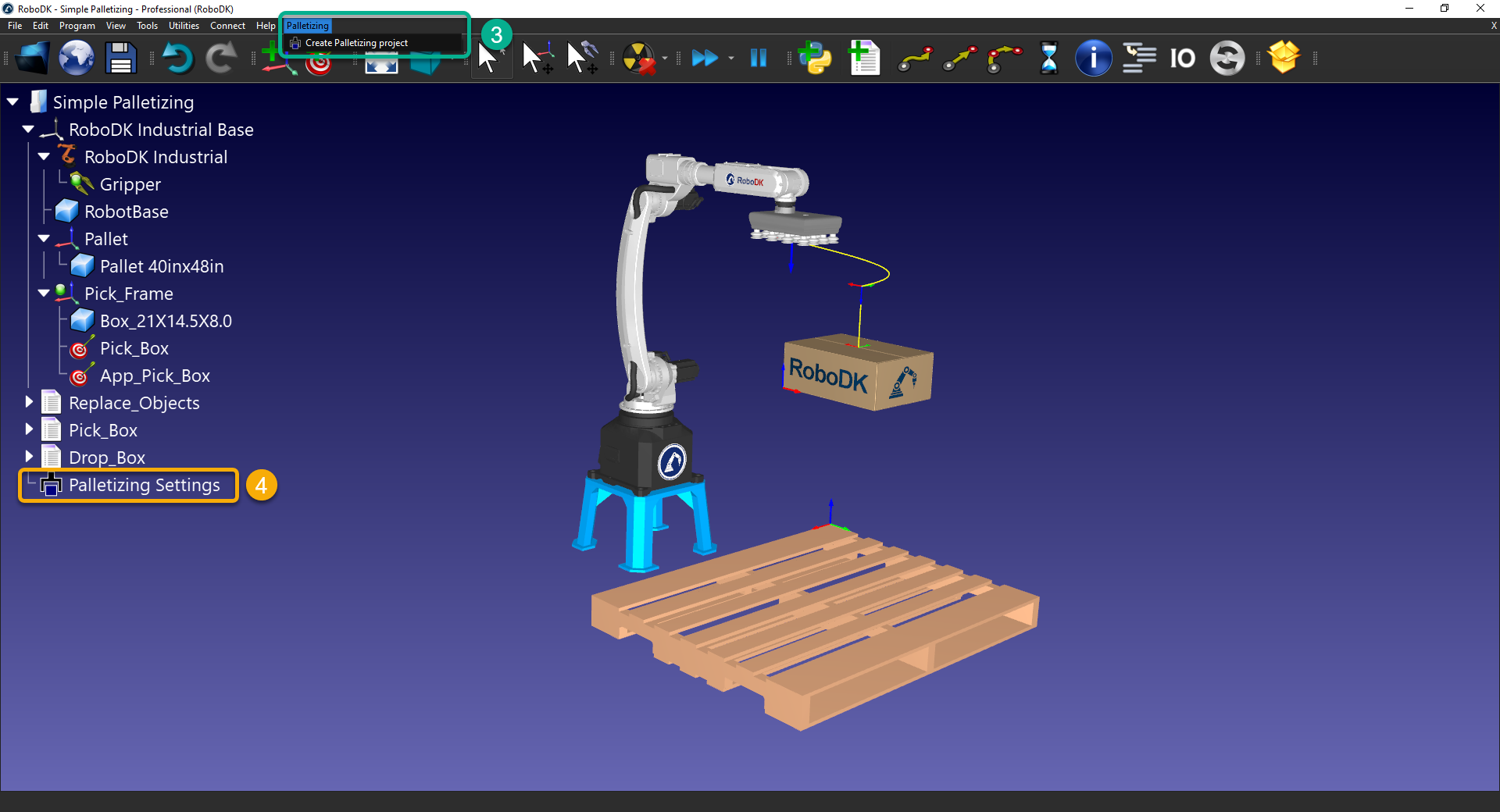
3.确保通过选择启用码垛插件工具➔插件然后激活托盘装载插件.然后你可以选择托盘包装在主菜单中选择创建码垛项目.
4.双击堆垛设置在你的工作站树。
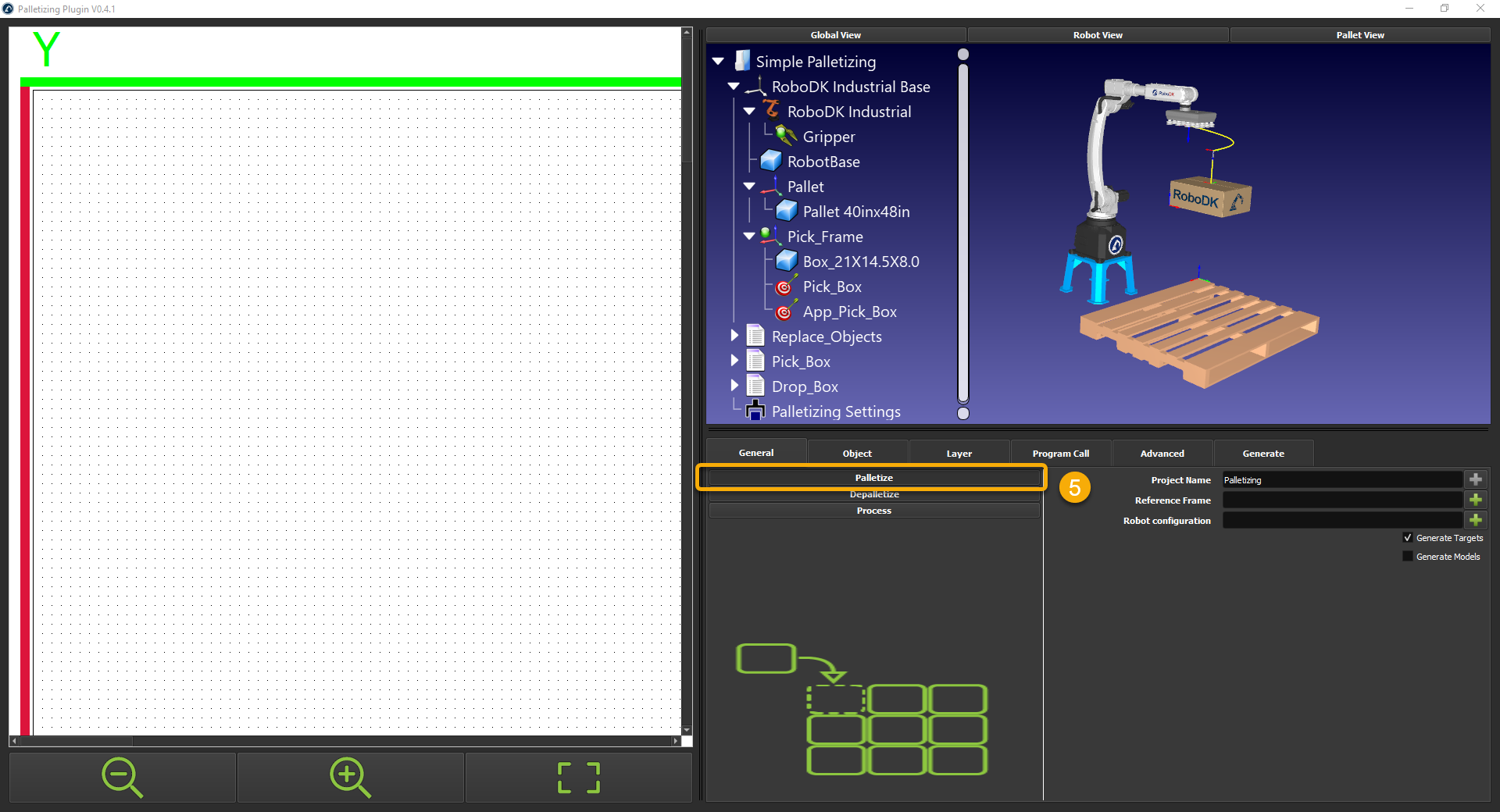
当您打开码垛菜单的主界面时,您可以选择拥有码垛项目、去码垛或进程设置(其中包括两者)。
按照以下步骤设置您的码垛项目:
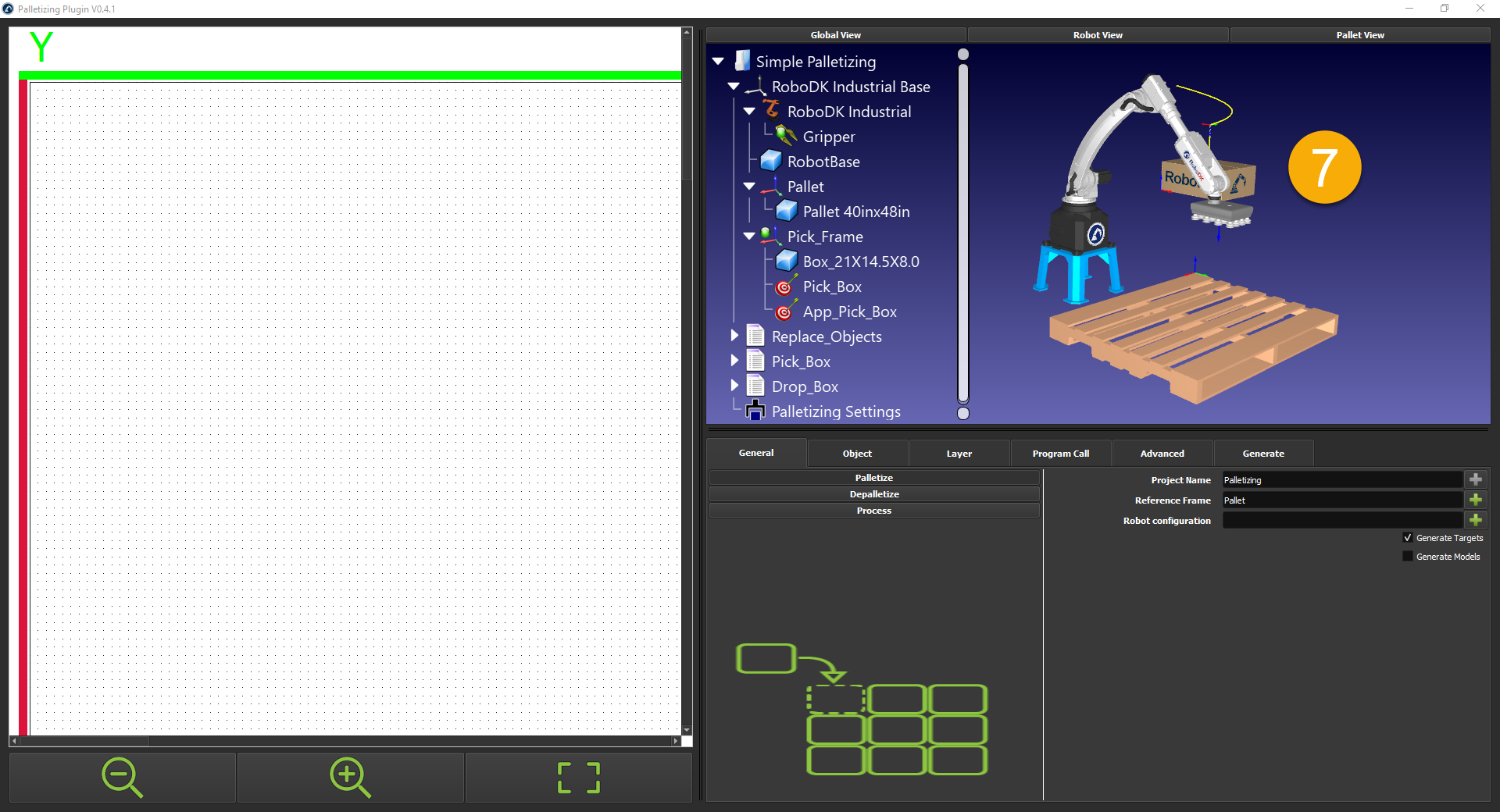
5.选择托盘包装选择。
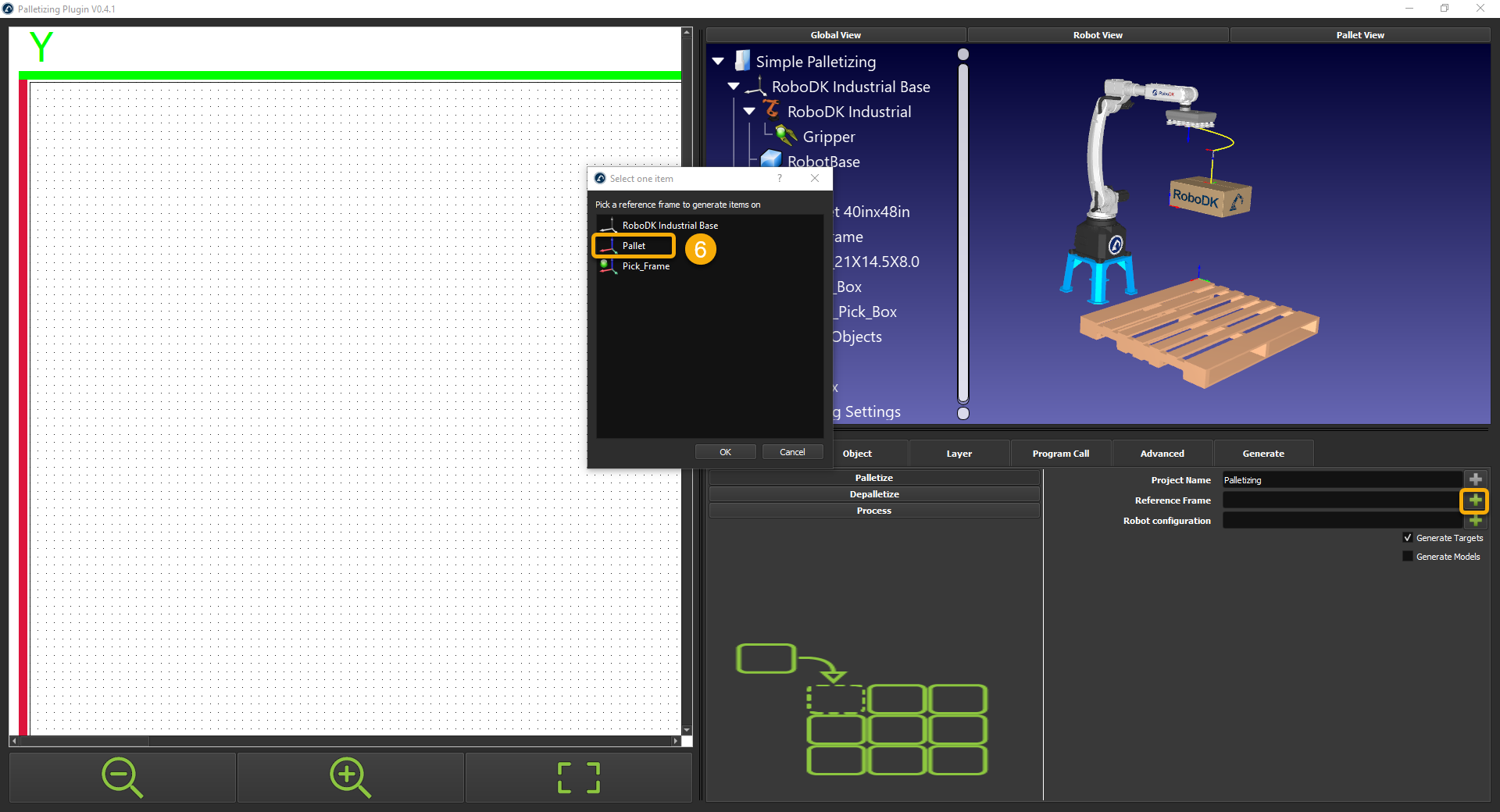
6.选择您希望堆叠盒子的框架;在这种情况下,托盘.您可以直接输入框架的名称,也可以使用+按钮从列表中选择。
7.使用3D界面,移动你的机器人靠近托盘的中间。这个位置将被用作机器人姿态的参考配置。
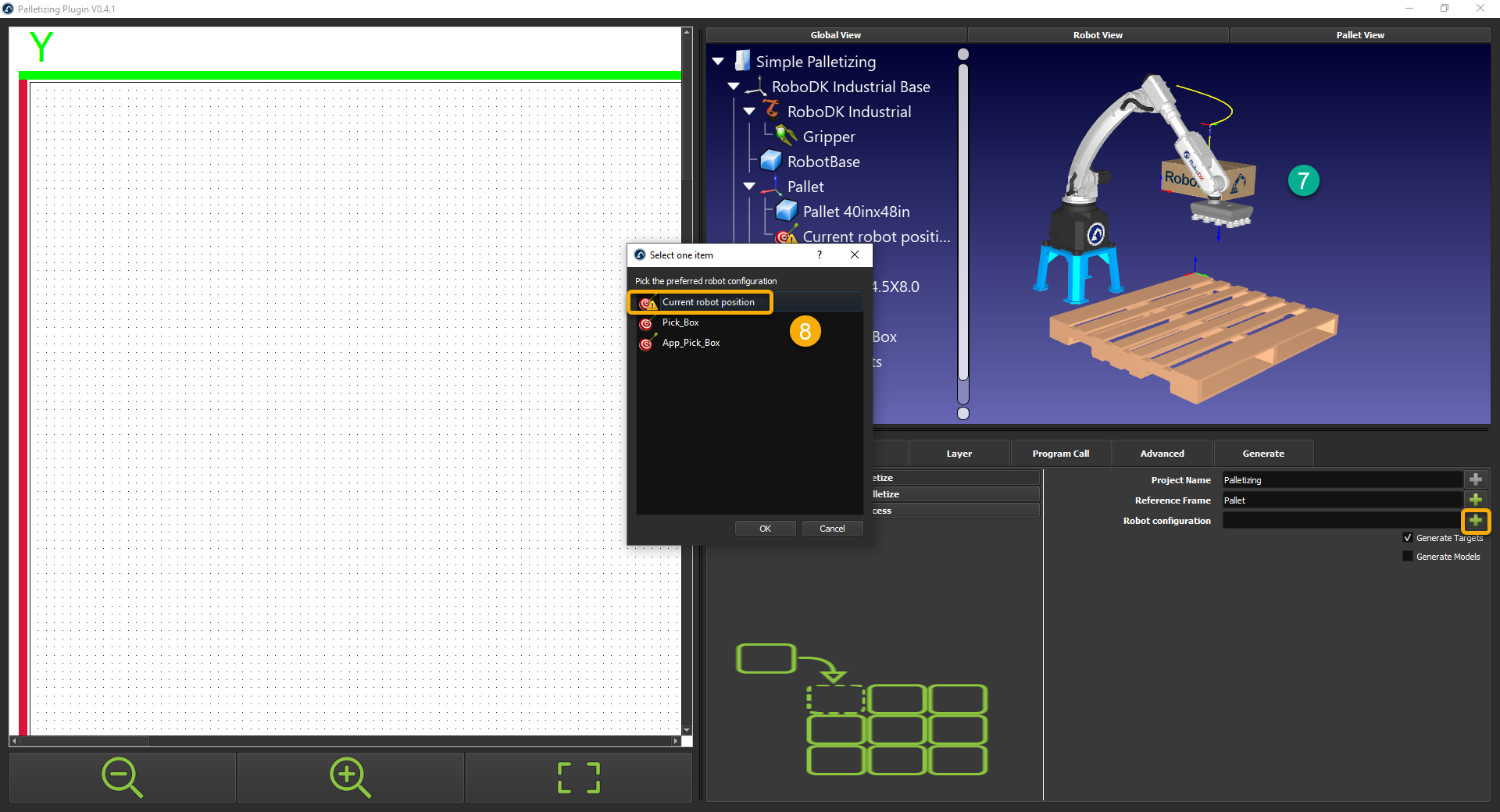
8.按“+符号链接到机器人的配置文本框,然后选择机器人当前位置.或者,您也可以选择一个已经存在的目标。
9.对于码垛项目,请确保生成目标被选中,并且生成模型未被选中。
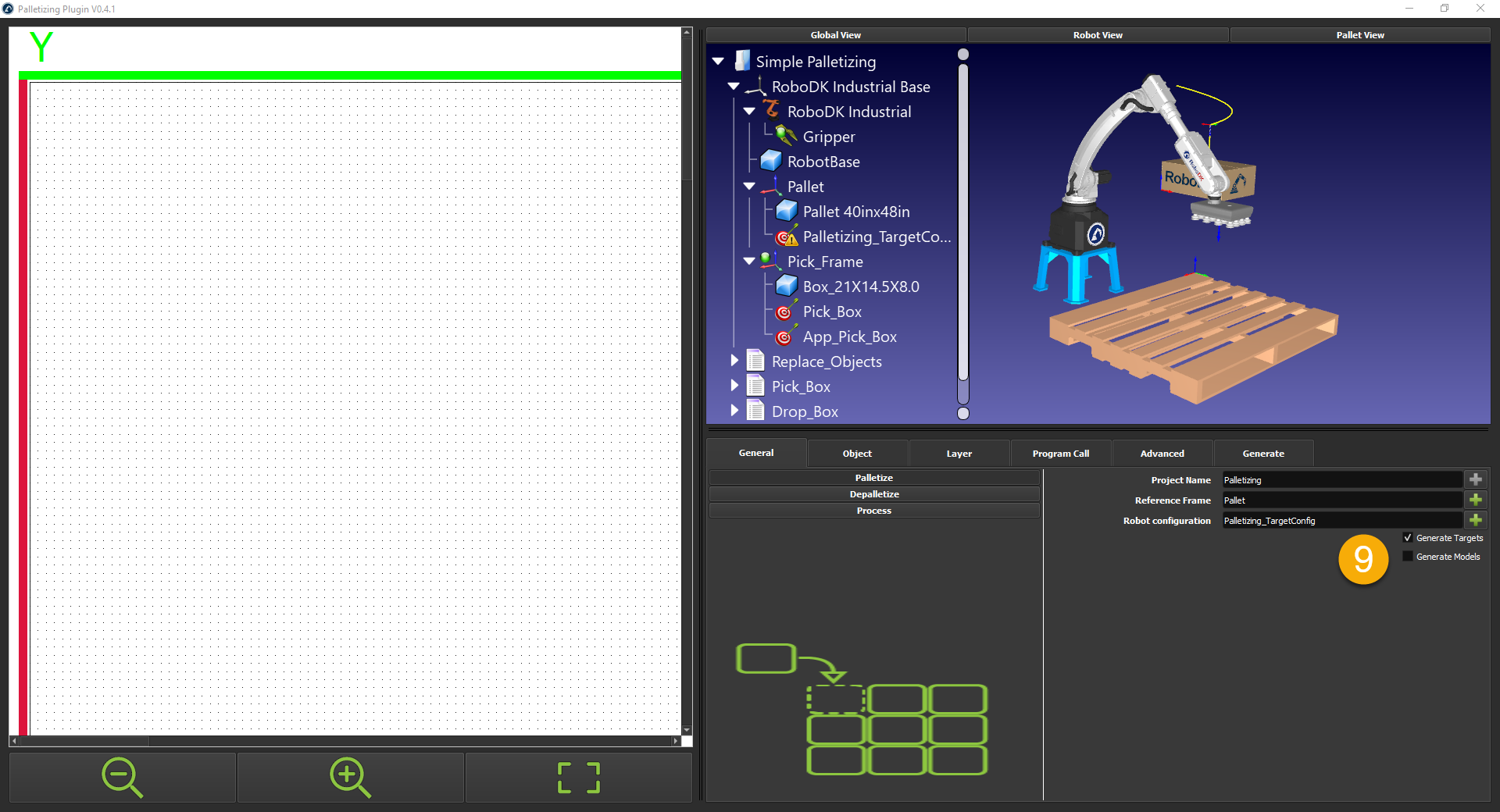
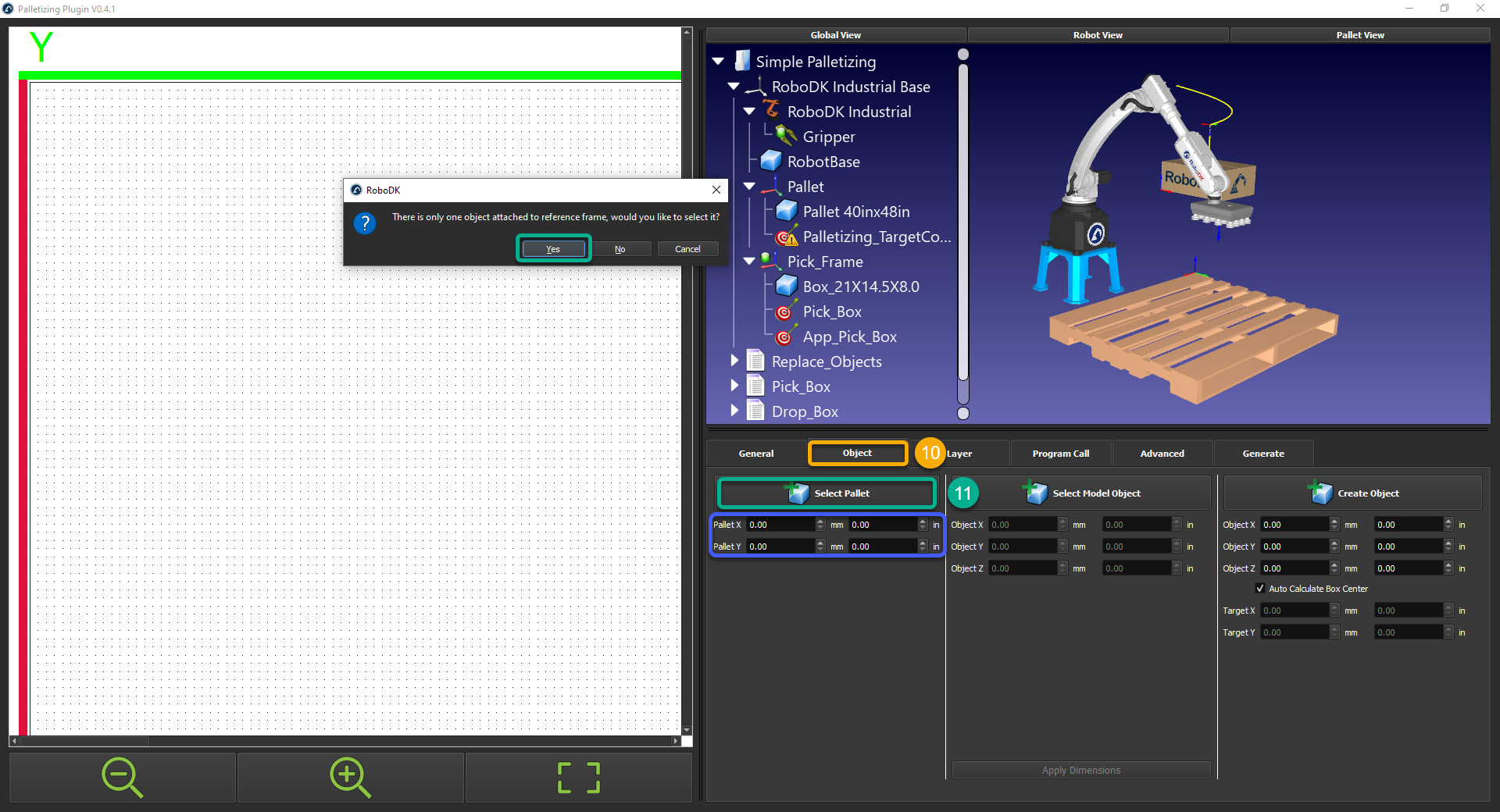
10.移动到对象选项卡导入所需的对象。
11.选择您在RoboDK Station中导入的托盘。或者,如果您没有3D模型,您可以简单地输入尺寸。
12.托盘的2D表示将出现在2D界面中。X轴和Y轴应与3D环境的托盘参考框架的X轴和Y轴相匹配。
13.输入框的尺寸创建对象”。或者,您可以将箱子的3D模型定位到托盘参考框架上,并使用“选择模型对象”。此选项将要求您在框的顶部选择一个目标。更多细节将在以后的示例中介绍。
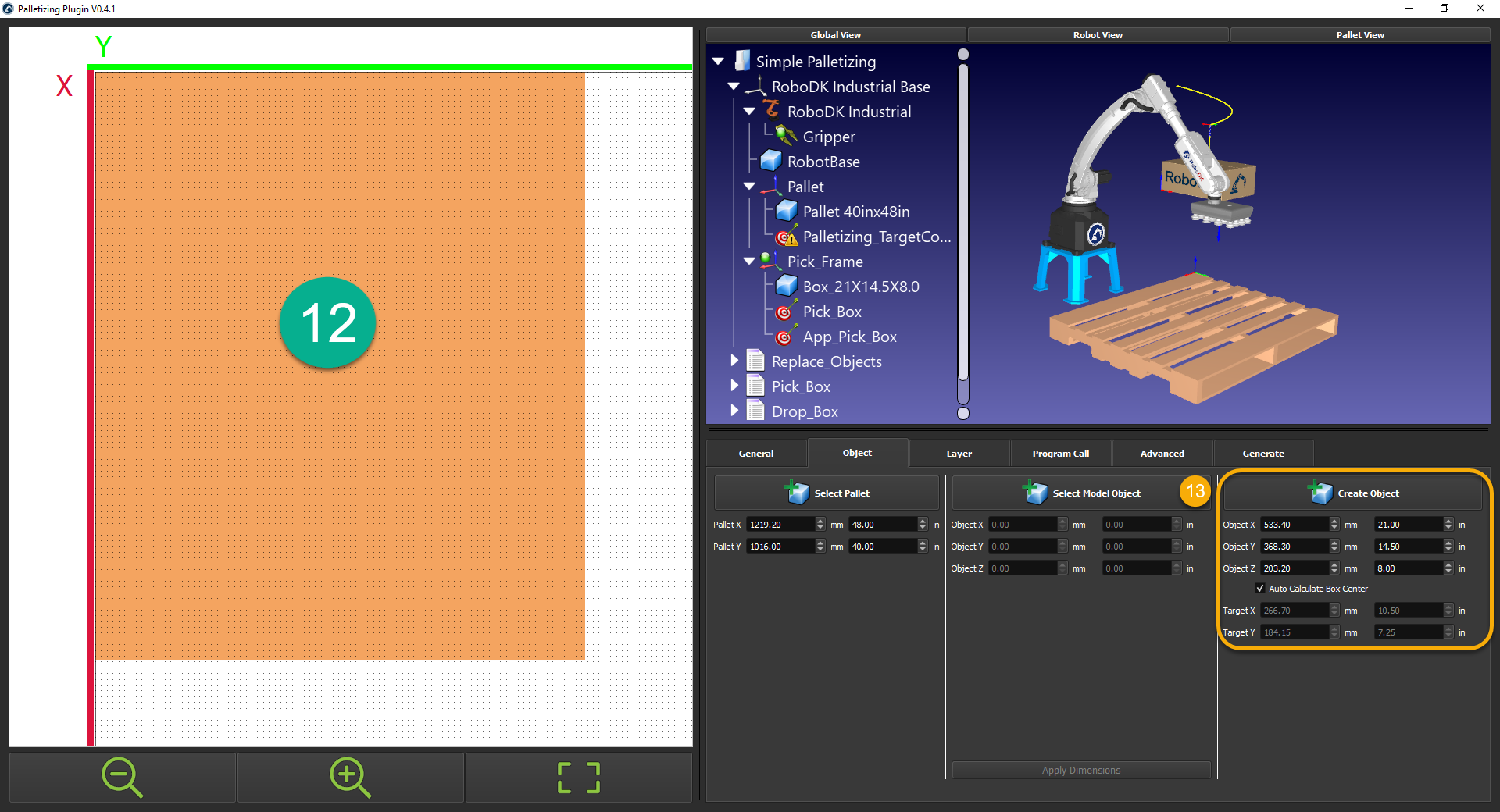
14.一旦你点击创建对象,屏幕左侧将出现4个框。每90度旋转一个盒子。一条红线和一条绿线表示TCP围绕Z轴的旋转。
码垛层允许您设计如何将对象放置在托盘的每一层上,并正确定义您的首选布局。
按照以下步骤创建图层布局:
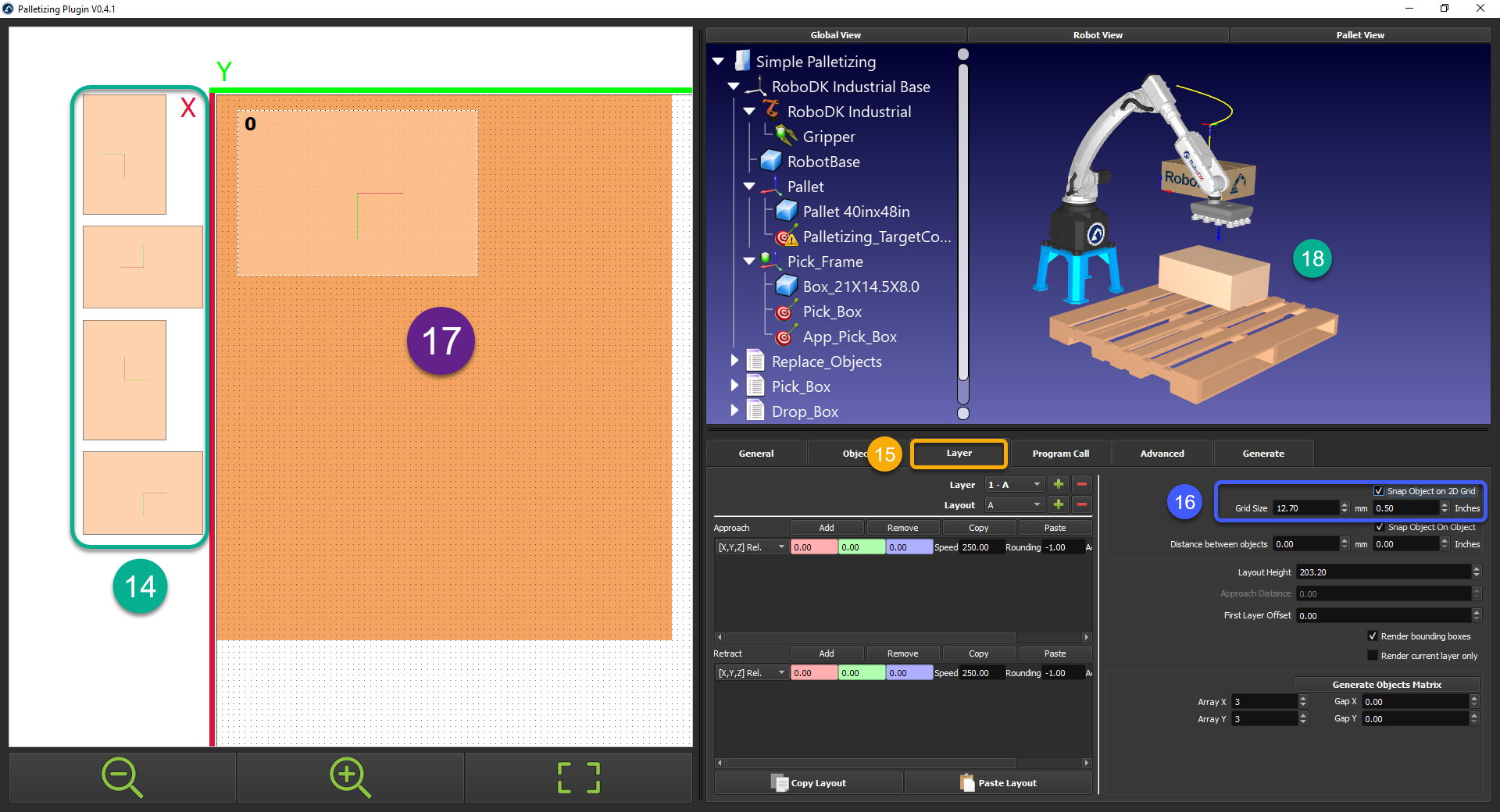
15.移动到层选项卡创建图层设计。
16.确保你的布局网格是根据你的需要设置的。在这种情况下,我们将使用0.5英寸。
17.从左侧选择一个框,并将其拖放到托盘上。
18.当在2D界面上移动盒子时,它会出现在3D环境中。
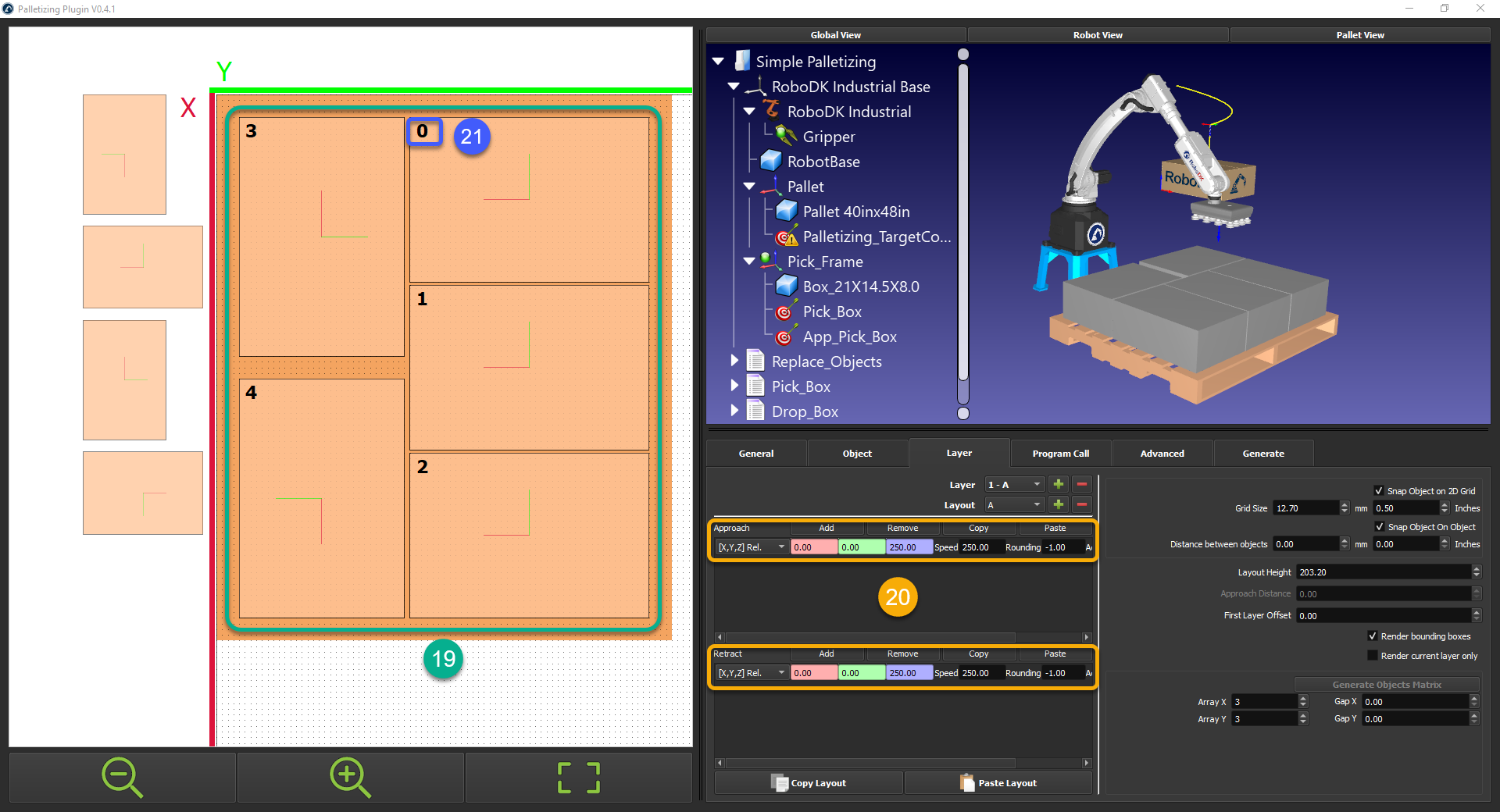
19.创建第一个图层的布局。
20.添加一个相对的方法和收缩运动到每个位置。
21.这个数字表示盒子放置的顺序。你可以右键单击该框以修改订单。
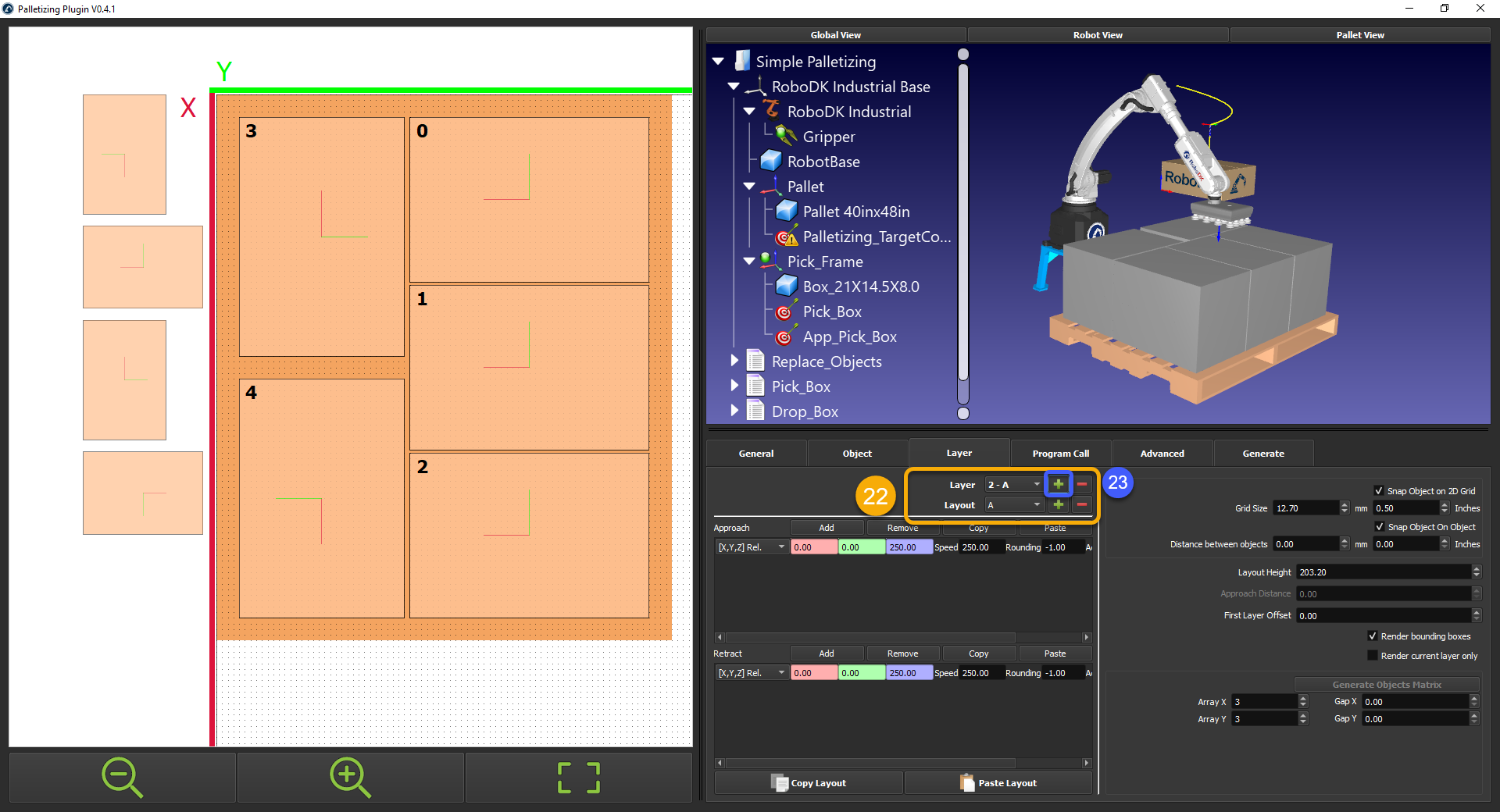
22.组织你的图层。
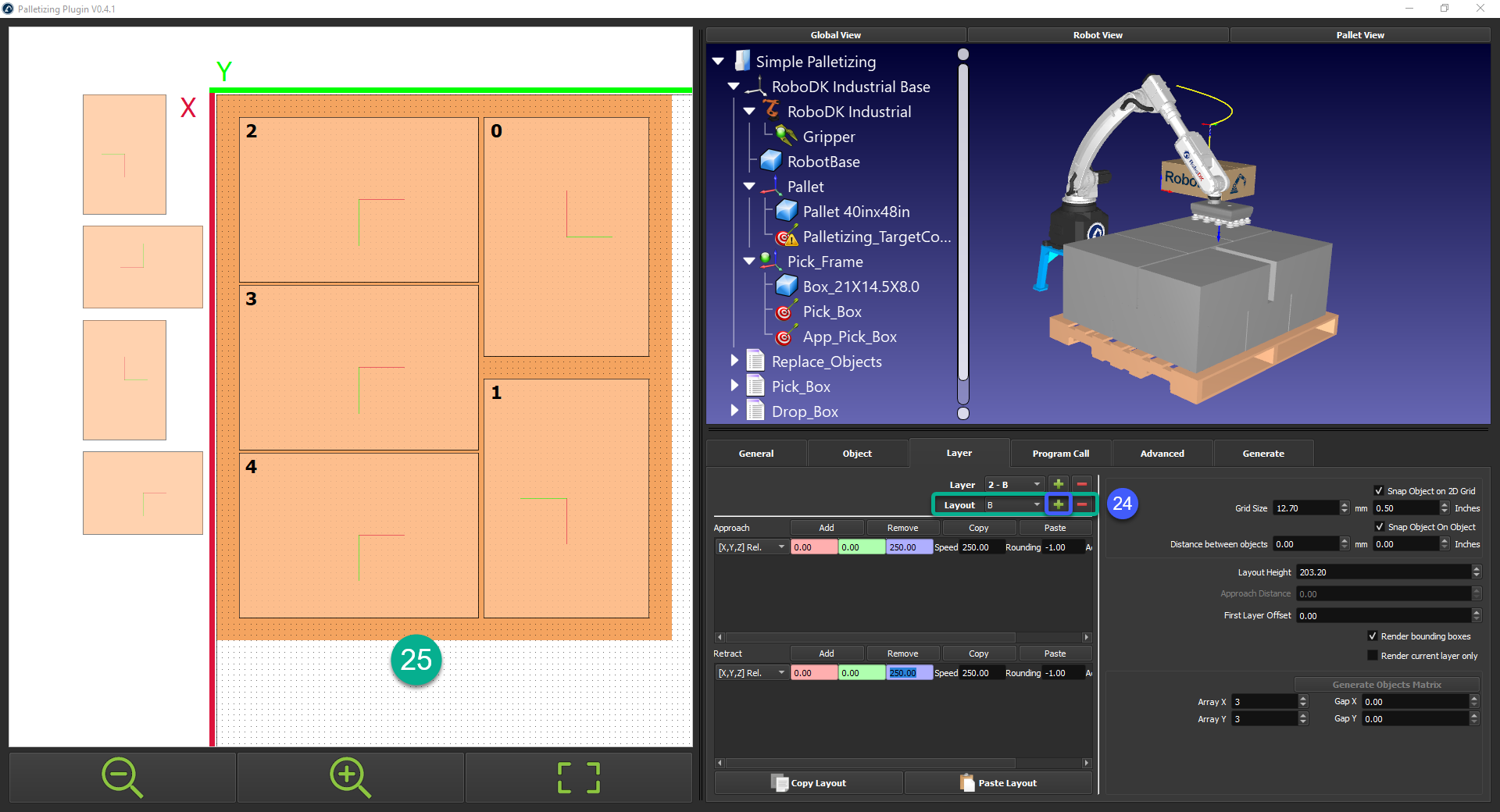
23.将新图层添加到堆栈中+”按钮。添加一个新图层将复制与它下面的图层相同的图案。
24.你可以创建一个新的布局(图案)通过按下+边链接到布局菜单。
25.创建您的替代布局。
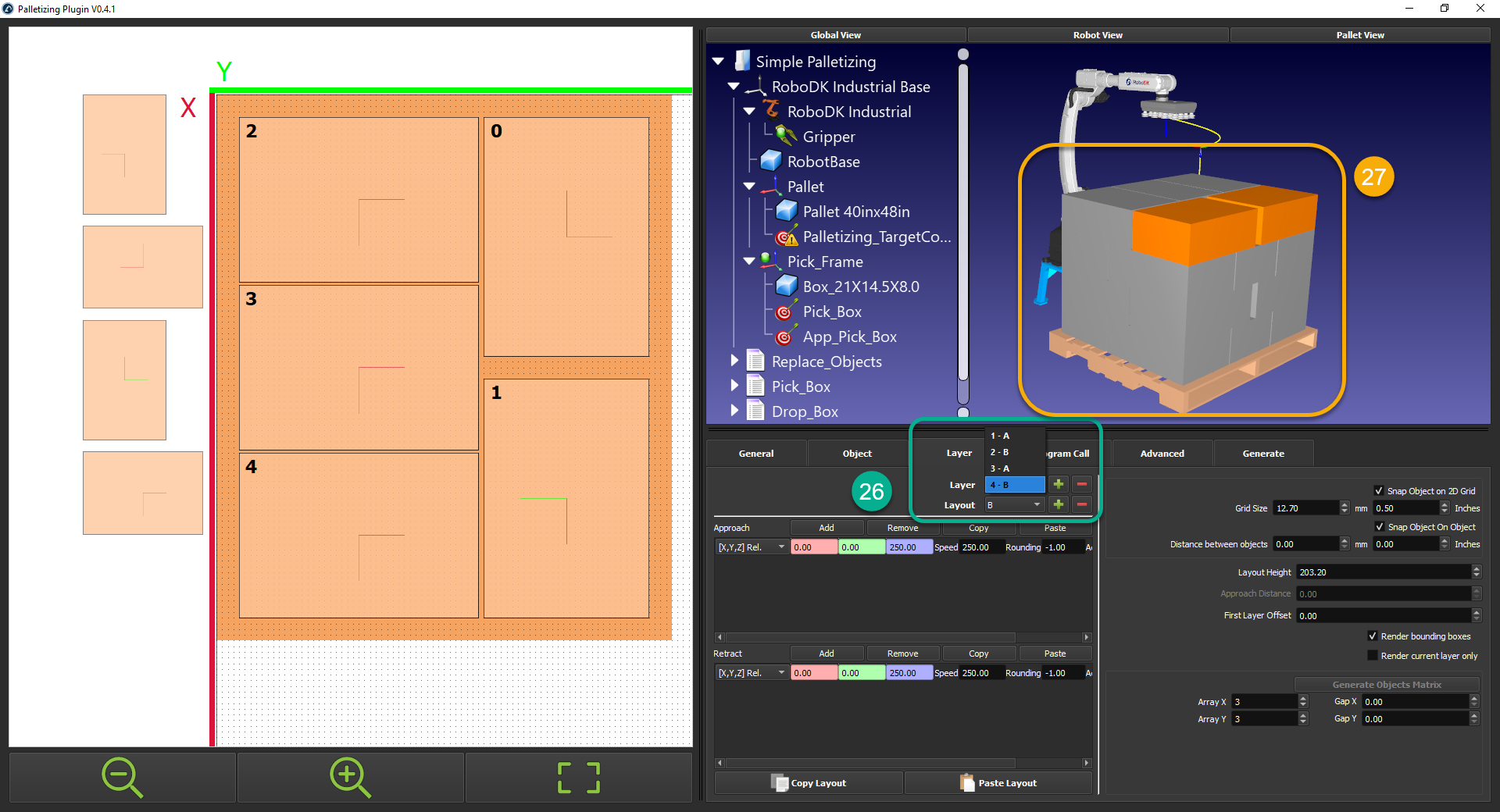
26.按你需要的方式组织你的图层。在这种情况下,我们在布置一个和布局B.
27.确保你所有的箱子都在机器人够得着的地方。
一旦创建了码垛项目,就可以生成需要在机器人控制器上执行的机器人程序。
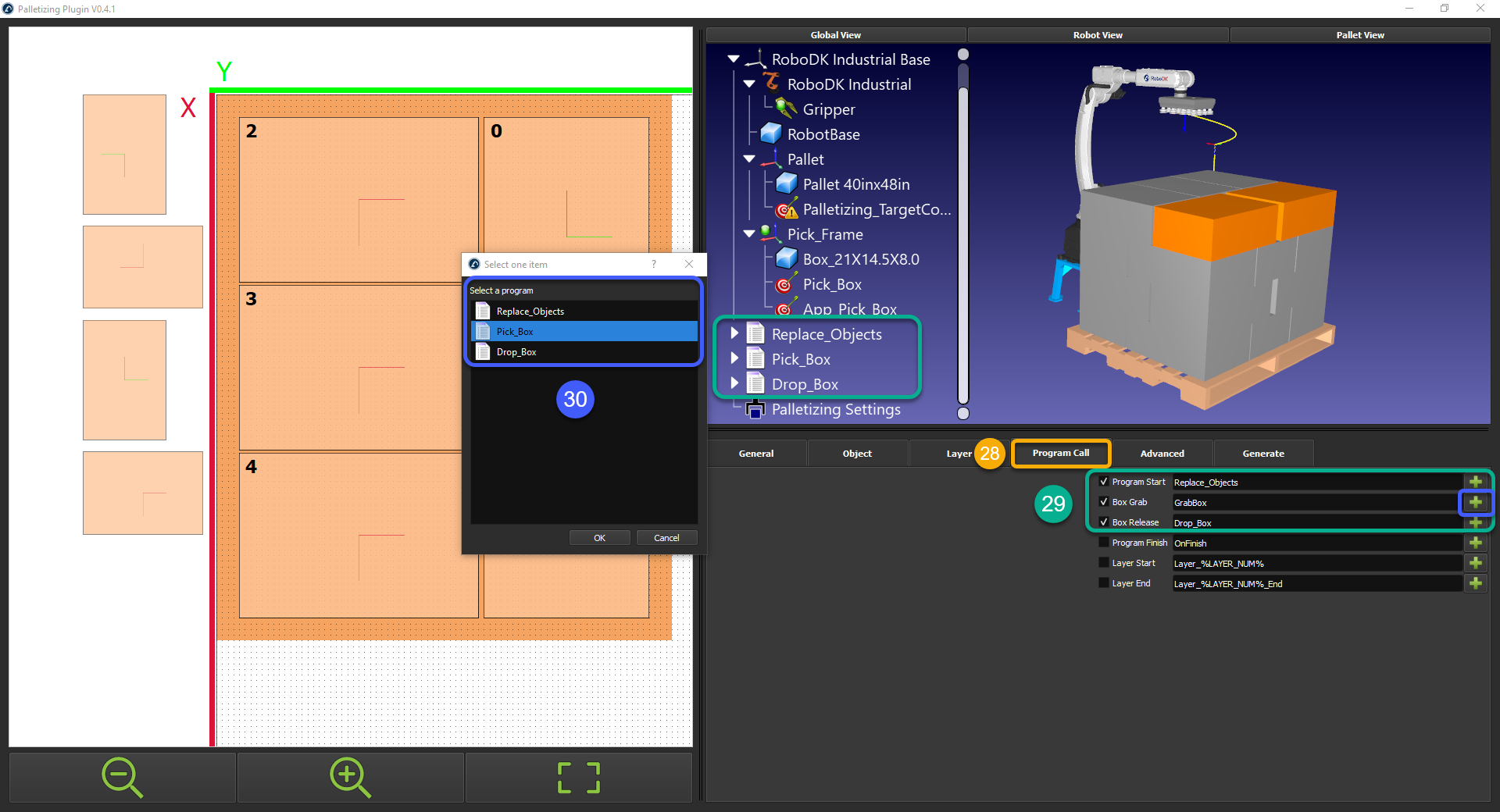
28.移动到“程序调用选项卡在程序开始时添加特定事件;当机器人需要拿起一个盒子或者当它需要放下一个盒子时。
29.在这个例子中,激活“程序开始”、“盒子里抓,和盒子释放”。
30.您可以输入要使用的子程序的名称,也可以按“+按钮从列表中选择。
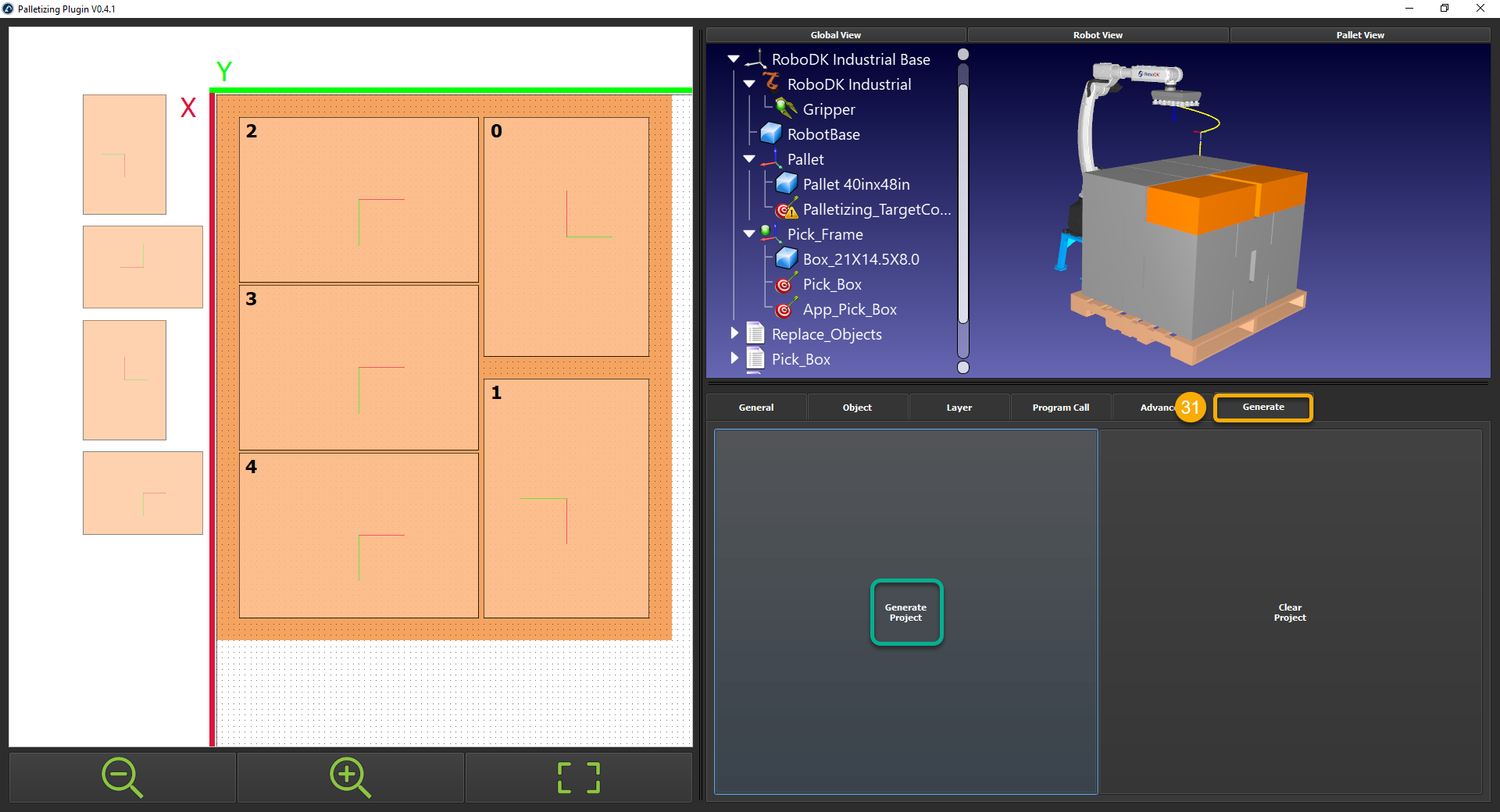
31.移动到“生成,并生成程序。关闭码垛窗口返回RoboDK的界面。
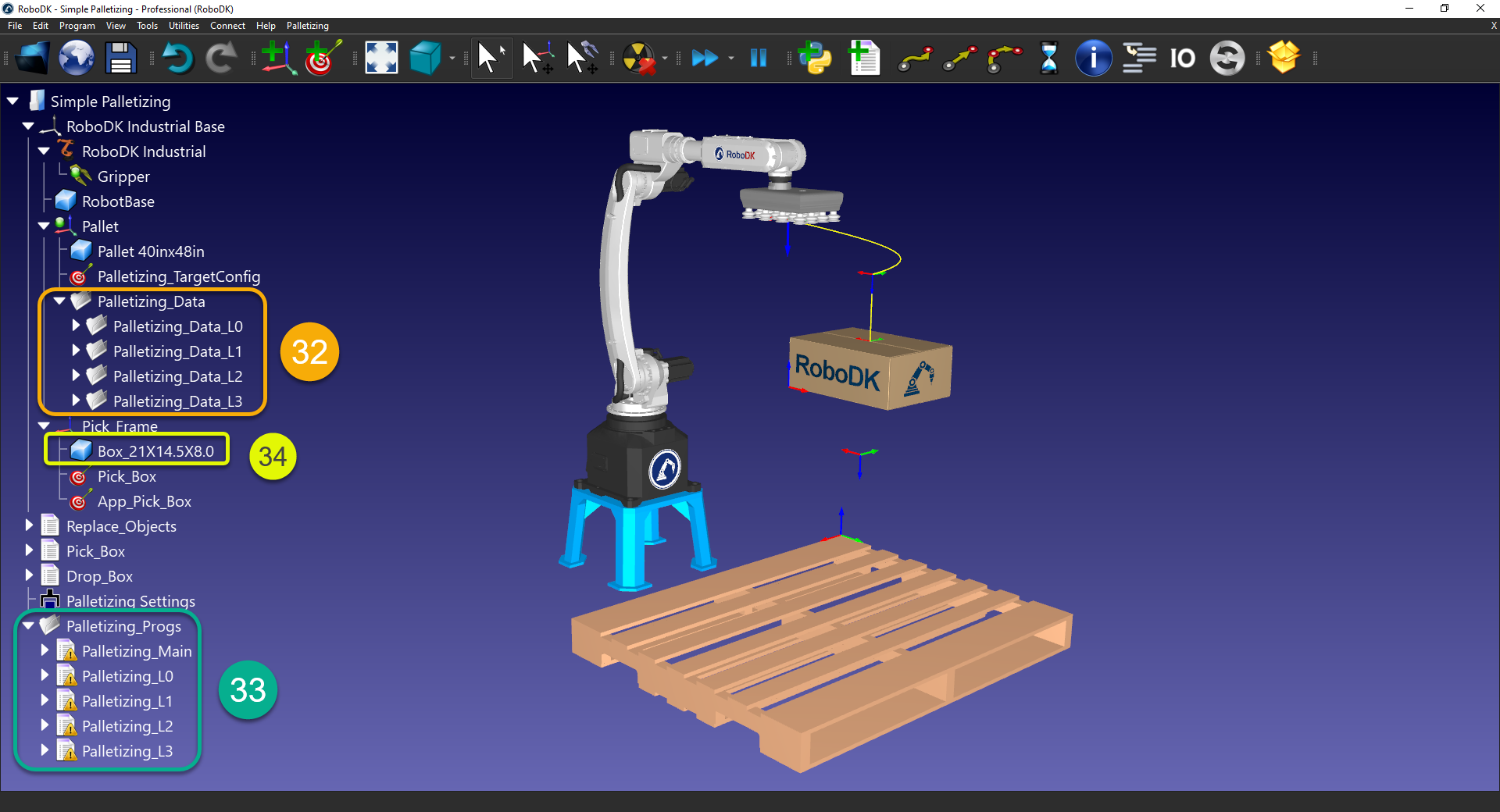
码垛插件在您的站点文件夹中创建了许多项目,包括所有要达到的目标。
32.文件夹下的"托盘框架包含目标。默认情况下,它们是不可见的,但可以像其他目标一样设置为可见。
33.一个文件夹将包含主码垛程序和每层一个子程序。
34.您需要创建足够的箱子来满足码垛项目。复制和粘贴您的盒子,尽可能多的盒子,你需要的。
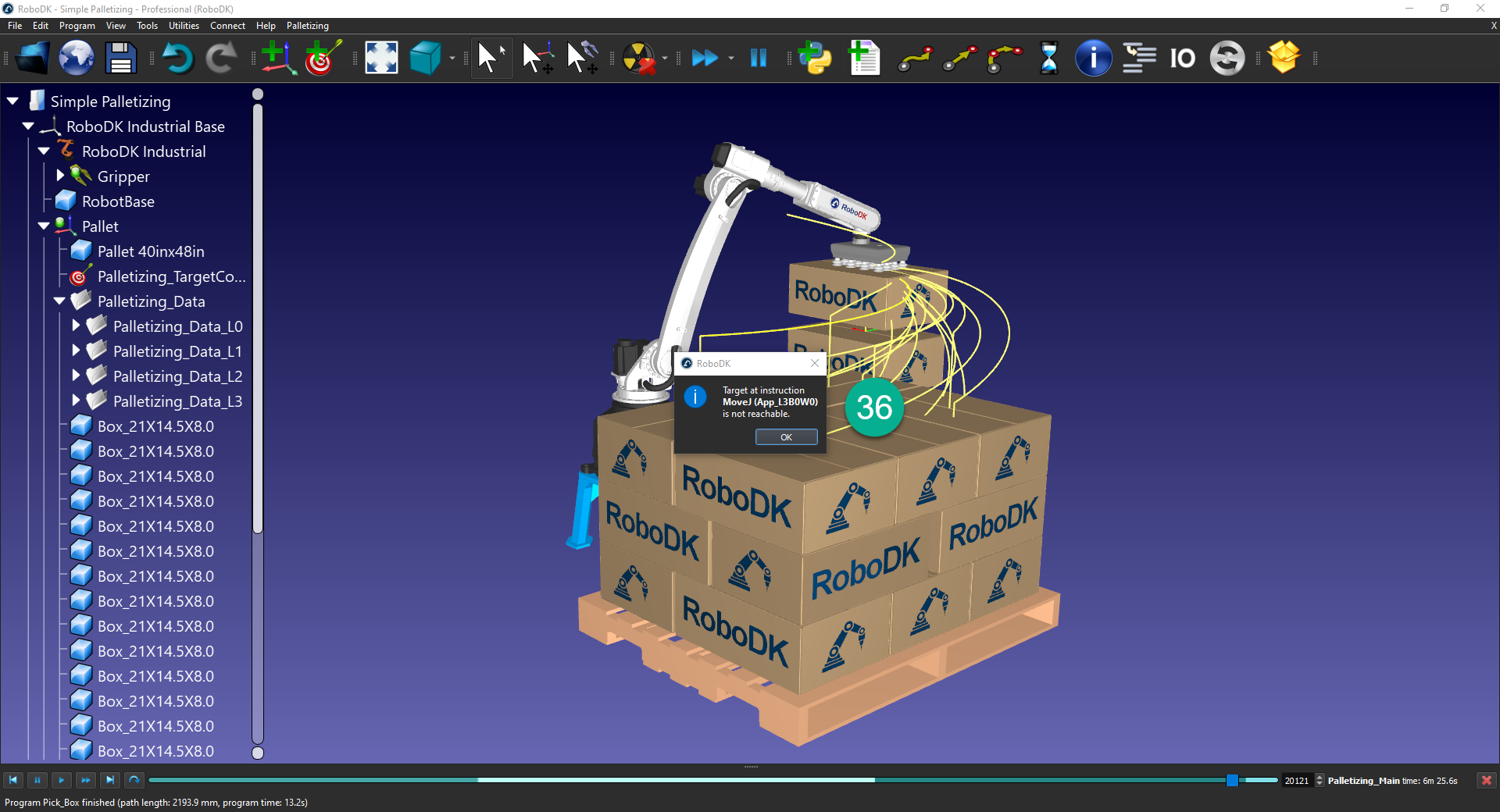
35.双击Palletizing_Main来运行主程序。

36.如果目标无法到达,RoboDK会通知您(如下图所示)。
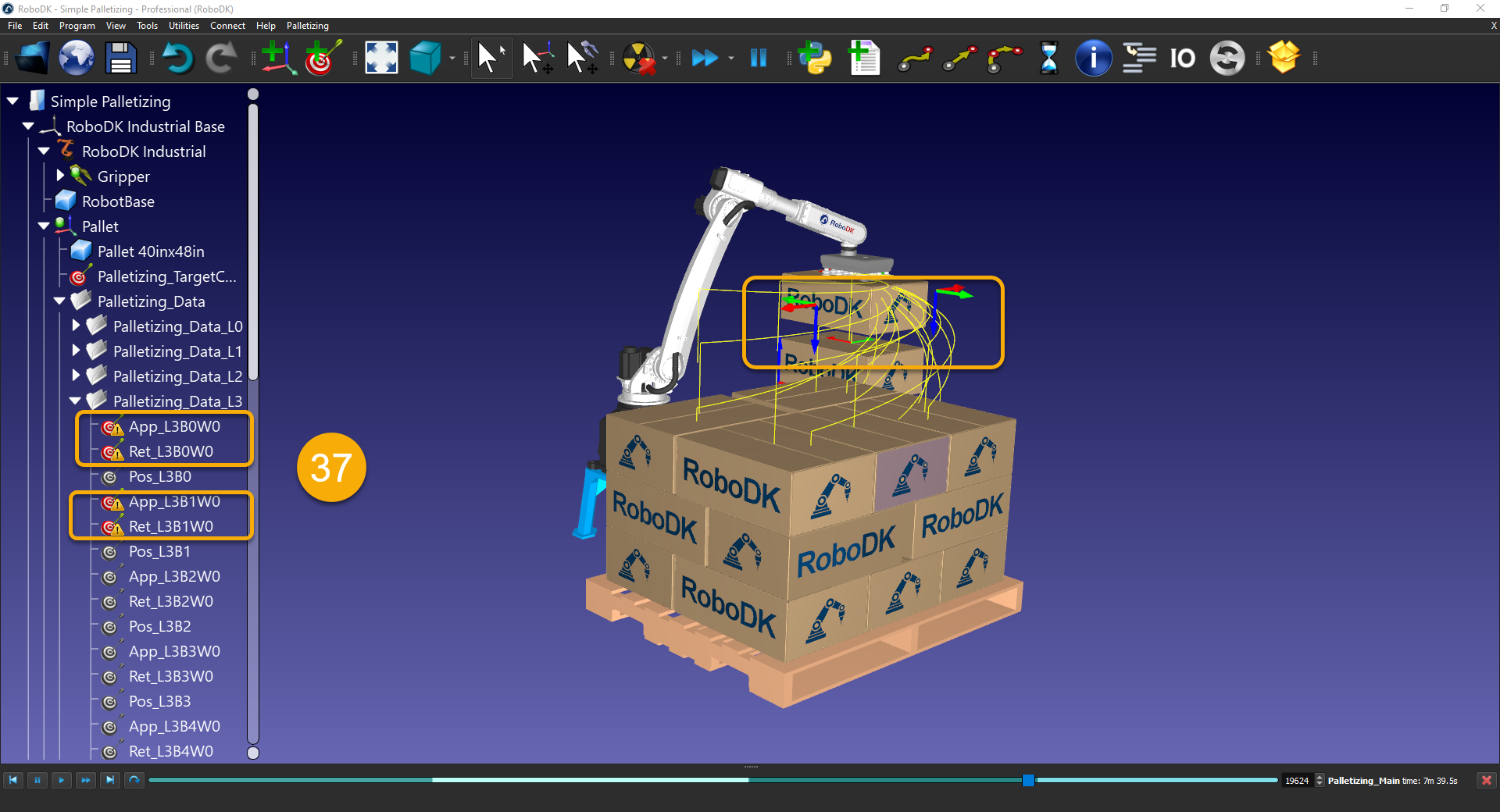
37.在列表中找到无法到达的目标。如果……托盘"参考系被激活,你应该看到警告标志在无法到达的目标上(如下图所示)。
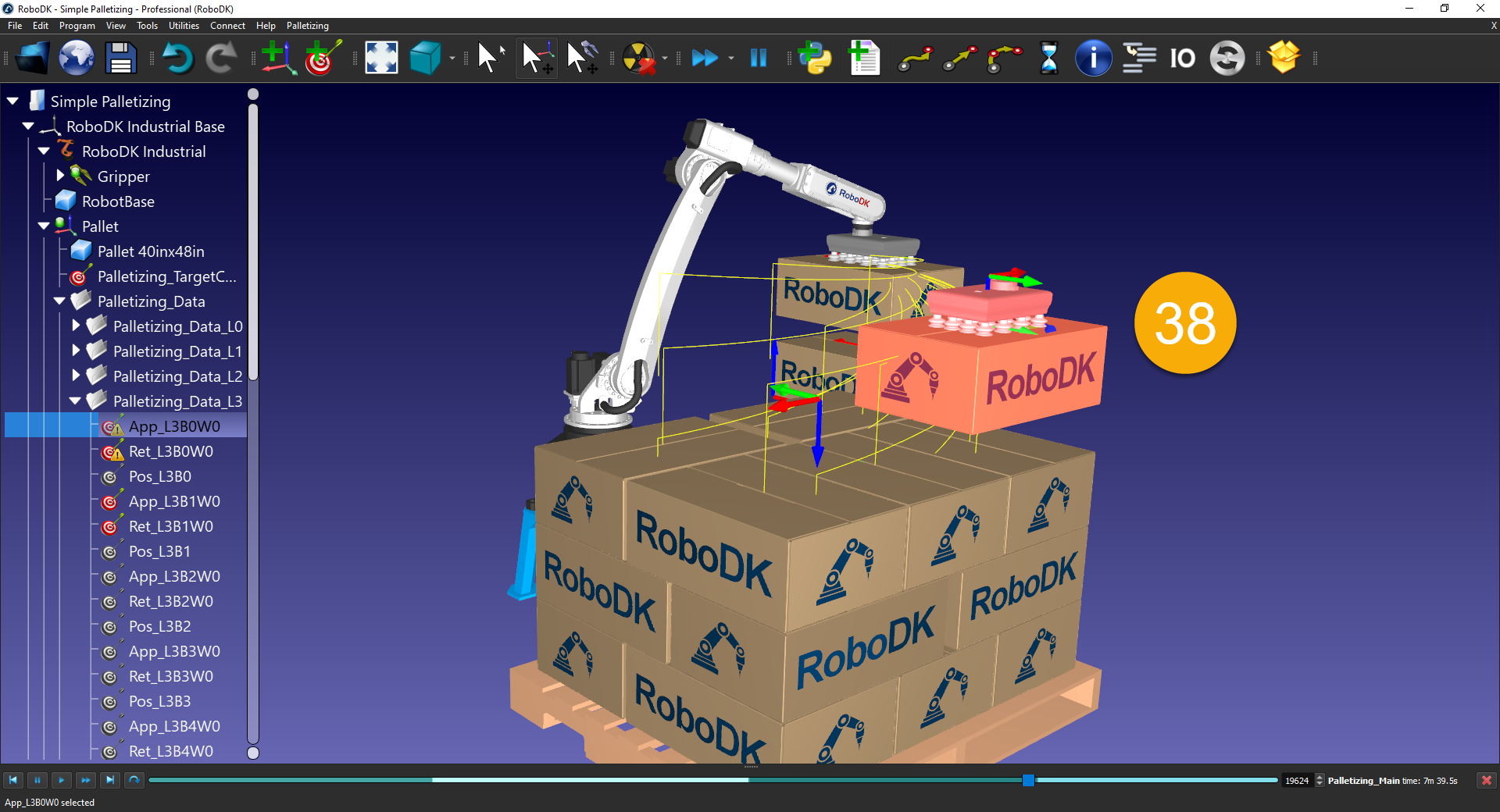
38.使无法到达的目标可见,然后按"Alt然后把它们移到一个可以到达的地方。
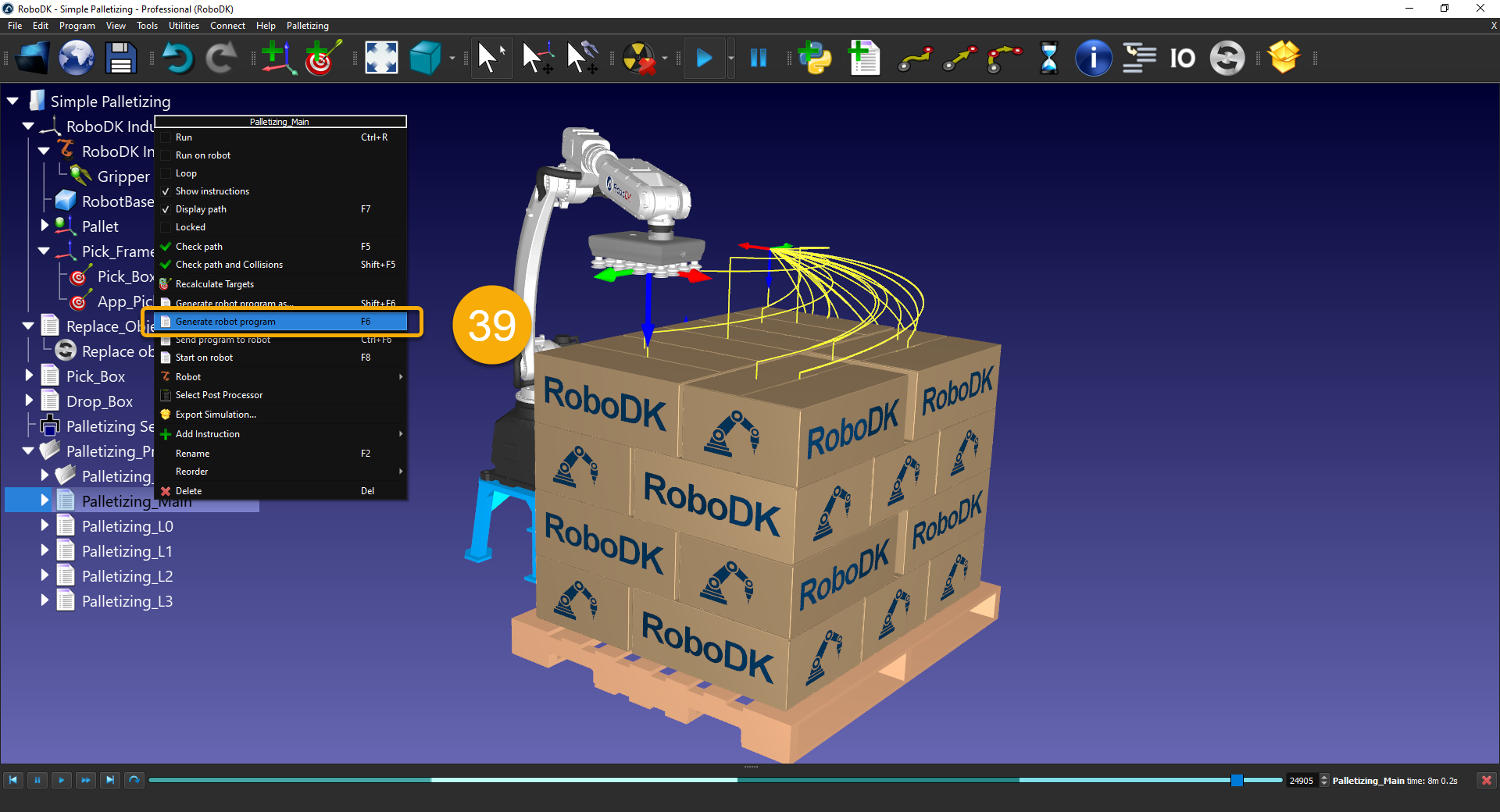
39.右键单击Palletizing_Main“编程并选择”生成机器人程序来创建机器人控制器可以执行的程序。