OPC-UA
本文档将向您展示如何将OPC-UA连接添加到RoboDK。OPC UA连接允许您与支持该协议的plc和其他设备进行交互。您应该启用RoboDK中的OPC-UA插件,以便将OPC UA服务器和客户端功能添加到您的项目中。
RoboDK包含一个OPC-UA插件,允许您添加OPC UA兼容性到您的RoboDK项目。
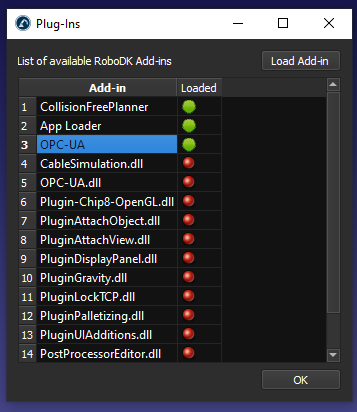
默认情况下,RoboDK禁用OPC-UA外接程序。一旦启用,每次启动RoboDK时都应该显示该加载项。
您可以通过以下步骤启用OPC UA插件:
1.选择Tools-Add-ins。
2.双击OPC-UA。
您应该看到一个带有OPC-UA特性的附加工具栏。
//www.sinclairbody.com/addin/com.robodk.plugin.opc-ua.

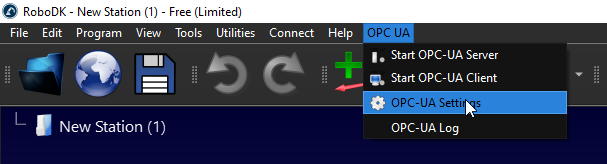
您应该在工具栏中看到OPC-UA按钮,并在菜单中看到OPC-UA条目。
在本例中,您将学习如何启用OPC UA插件并将RoboDK转换为OPC UA服务器。我们将使用UaExpert软件和Beckhoff TwinCAT3 TF6100浏览一些设置。
OPC UA插件允许您配置一些设置,例如服务器端口。您还可以选择激活服务器、停用服务器或自动启动RoboDK。
启用OPC UA外接程序后,选择OPC ua -OPC ua设置配置您的OPC UA设置。
左侧显示OPC UA设置界面,如下图所示。
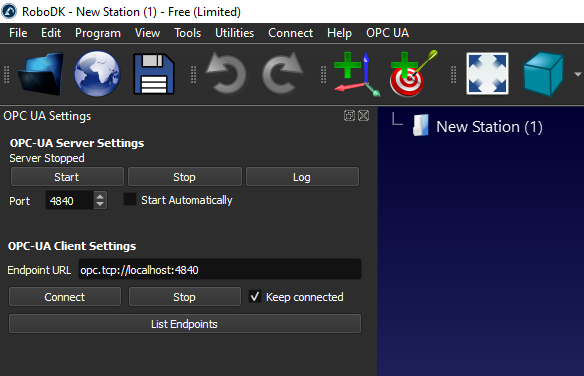
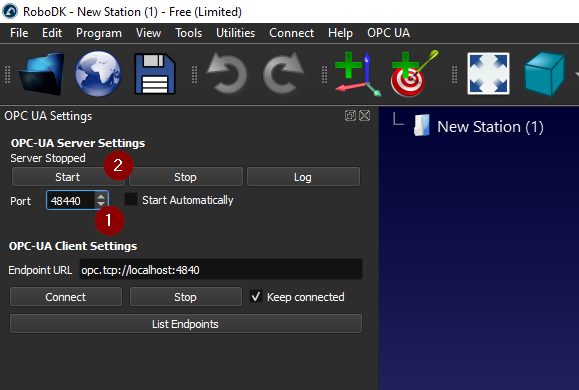
如果你看到一个消息,如“RoboDK的OPC UA服务器运行在端口4840”,这意味着在RoboDK的OPC UA服务器启动。
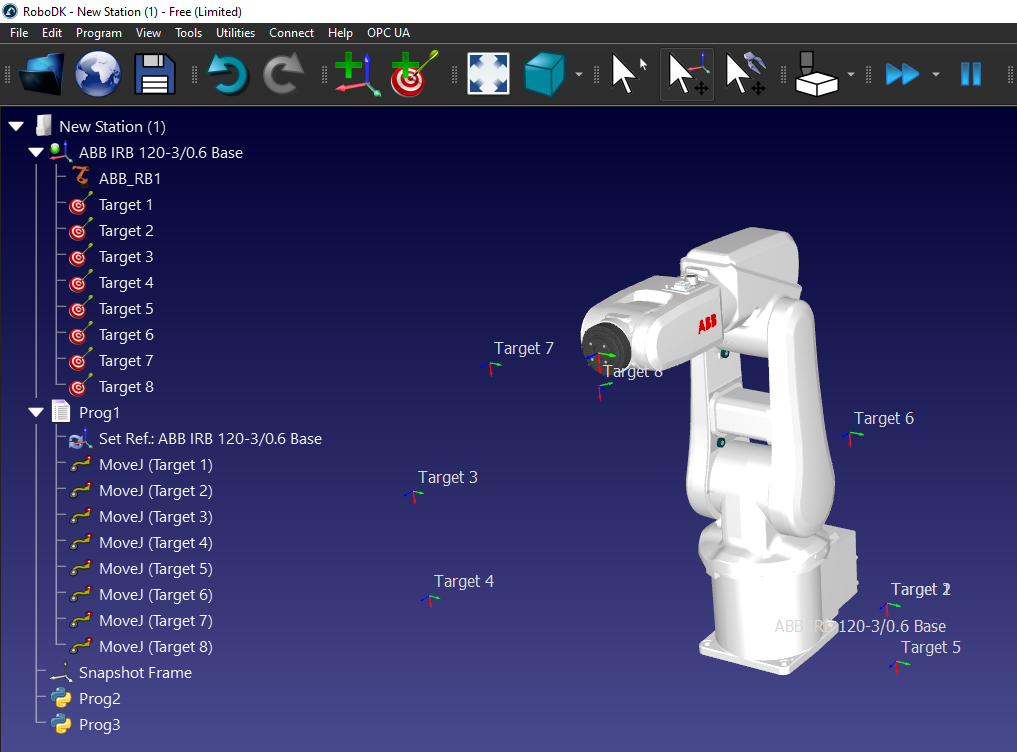
您可以与任何有一个或多个机器人的RoboDK站测试OPC UA连接。
您可以使用UaExpert软件测试与RoboDK OPC UA服务器的连通性。
您可以从统一自动2022世界杯国家队名单化网站下载免费版UaExpert软件:https://www.unified-automation.com/2022世界杯国家队名单downloads/opc-ua-clients.html.
启动UaExpert,点击“+”按钮添加RoboDK OPC UA服务器。
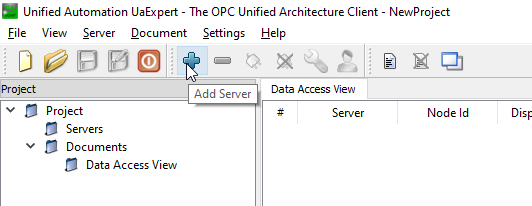
展开自定义发现并选择<双击添加服务器。>选项添加RoboDK OPC UA服务器。
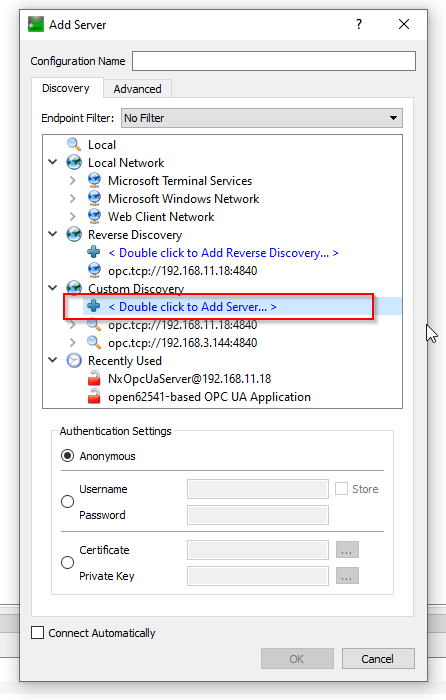
输入上一步中配置的OPC UA服务器的URL“OPC .tcp://127.0.0.1:48440”。

连接安全选项为“无”的OPC UA服务器。

完成服务器配置。

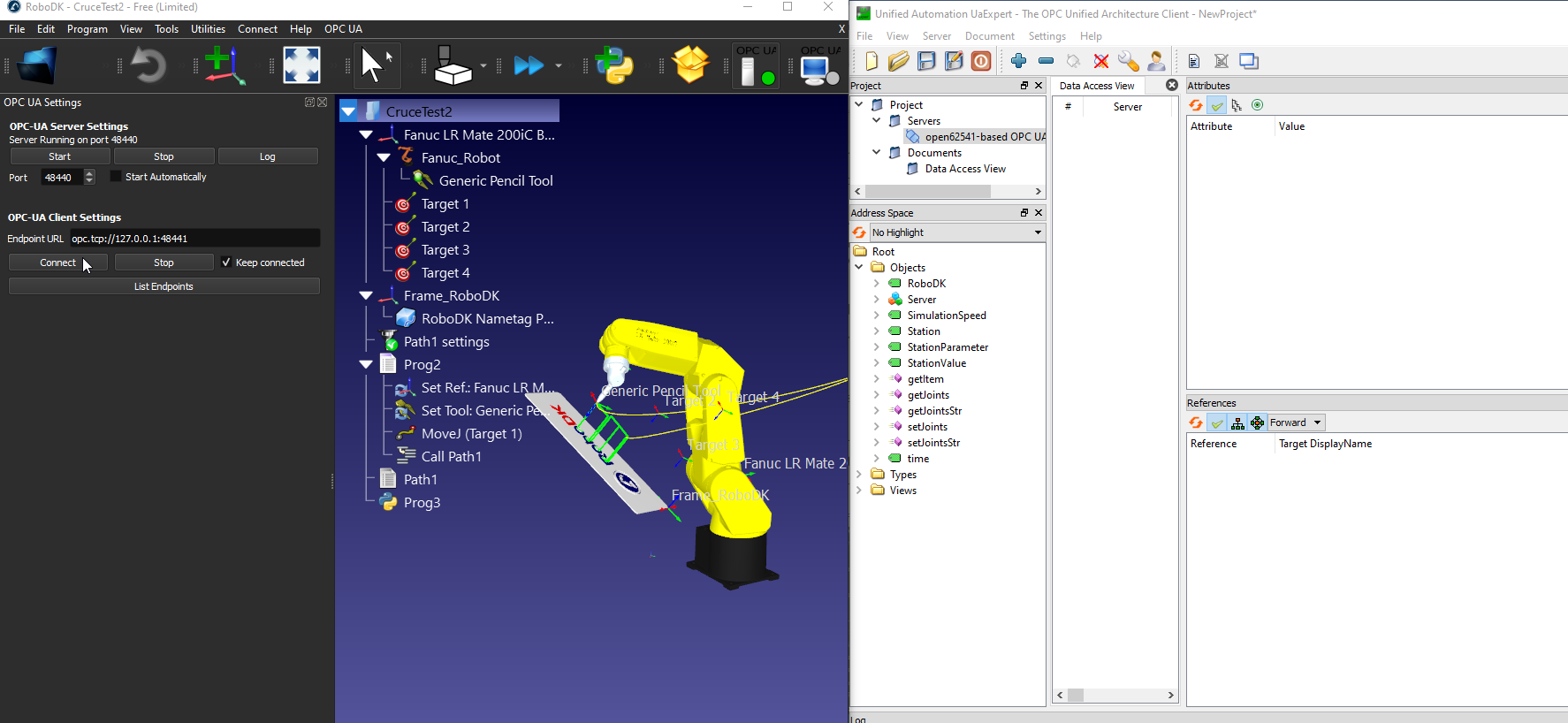
现在您可以从UaExpert连接到RoboDK OPC UA服务器。

当连接建立时,您可以看到Nodes和Methods。

RoboDK OPC UA服务器内部有一些节点可以让您交换有关站点的一些基本信息。
RoboDK节点是提供RoboDK软件实际版本的节点。

本操作中使用的版本为RoboDK 64 Bit v5.5.3.23031。

仿真速度是显示实际仿真速度的节点,允许用户覆盖当前的仿真速度。

节点值参考仿真速度滑动条。
当前仿真可以从该节点读取,并且可以覆盖仿真速度。

站节点是一个节点,它允许用户在RoboDK中获得站的当前名称。

正如您在下面看到的,站点节点引用了您在RoboDK中的“站点名称”。

站点参数和站点值是一对设置节点,允许用户获取或设置站点内的任何参数。RoboDK OPC UA服务器将持续监控“StationParameter”的实际值,并从站值节点返回该“StationParameter”的值。

您可以通过右键单击您的RoboDK站>站参数查看您的站参数。

在Constant parameters字段中,您可以看到默认的站点参数及其值。

站点参数引用“参数”字段,站点值引用“值”字段。

我们可以通过点击“添加”按钮来创建我们自己的参数。

添加了一个新的Station参数。

输入您的参数名称和参数值,然后按Apply保存它。

您也可以获得自己的站点参数。

节点时间是一个节点,可以让您获得RoboDK站的当前时间。

返回一个DataTime格式的值。

这个节点是不断更新的。
RoboDK OPC UA服务器还提供了一些方法,允许用户动态访问RoboDK站的数据。
我们可以右键单击Method>Call来执行该方法。

getItem是一个允许用户获取Item指针的方法。

对于inputargarguments,设备名称是必需的,你可以想象设备名称是你的工作站名称,机器人名称等。itemid是outpuarguments它返回那个设备的指针。

在这个例子中,我收到了我的ABB机器人的项目ID(指针),命名为“ABB_RB1”。

如果项目名称无效或在您的站点中不存在,则返回0。

getJonits是一个方法,它允许用户根据Item ID从站点获取机器人的关节值。

Item ID是Item的指针值,您可以从getItem()方法中获取它。

我们将以“ABB_RB1”项目名称获取项目ID,并返回一个UInt64值。
在传递Item ID的方法中返回关节值,该方法是在前面的方法中获得的。

getJointsStr是一个允许用户基于字符串值获取关节值的方法。

我们可以在这个方法中传递Robot name (String)。

在My Station中,ABB_RB1是我的机器人的名字。

我们只需在Robot name参数中传递“ABB_RB1”,然后调用该方法-返回字符串格式的关节值。

setJointsStr是一个方法,它允许用户基于字符串值设置机器人的关节值。

在Robot name中,传递的是ABB_RB1,我们可以在joint参数中传递一个带有关节值的字符串。
例如:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000

现在我们可以通过I/O>Devices>Add New Item插入OPC UA Client。

在“OPC >OK”中选择“虚拟OPC UA设备”。

插入OPC UA Virtual。

我们需要添加OPC UA Client来访问RoboDK OPC UA Server。
选择“设备1 >右键单击>添加新项”。

选择“OPC UA客户端(模块)”,单击“确定”。

插入OPC UA客户端。

打开OPC UA客户端>转到设置选项卡>单击“选择端点”来配置您想要访问的OPC UA服务器端点。

输入RoboDK OPC UA服务器URL,单击“更新”。

单击“Add Nodes”,浏览OPC UA服务器内部的节点。

如果TwinCAT与OPC UA服务器连接成功,则可以浏览OPC UA服务器的详细信息。

选择所有的方法和确定。

方法插入到配置中。

在此字段中配置您的名称前缀。

按“创建Plc代码”从TwinCAT创建Plc代码。

在您的项目中创建一个OpcUaClient文件夹,并且所有RoboDK Method都以IEC61131-3功能块格式创建。

本节展示了Beckhoff TwinCAT PLC与RoboDK OPC UA服务器通信的示例程序。
项目主要
VAR
bConnected: BOOL;
StationPointer:力;
iStep: INT;
bStart: BOOL;;
我:INT;
吨:吨;
bReset: BOOL;
bWrite: BOOL;
TON2:吨;
bShow: BOOL: = TRUE;
英属维尔京群岛:BOOL: = True;
END_VAR
VAR
Robot_name: STRING(80): =“ABB_RB1”;
Item_ID: ULINT;
arrJoints: ARRAY [0 . .LREAL 11);
strJoints:字符串(80):= ";
arrJointsFromStr: ARRAY [1 . .LREAL 11);
sSeparator:STRING(1):= ',';
arrJointsCommand: ARRAY [1 . .LREAL 11);
strJointsCommand:字符串(80);
END_VAR
VAR常数
cStepWaitCmd: INT: = 0;
cStepInit: INT: = 5;
cStepGetItem: INT: = 10;
cStepGetItemReset: INT: = 20;
cStepGetItemError: INT: = 990;
cStepGetJoints: INT: = 30;
cStepGetJointsReset: INT: = 40;
cStepGetJointsError: INT: = 991;
cStepGetJointsStr: INT: = 50;
cStepGetJointsStrReset: INT: = 60;
cStepGetJointsStrError: INT: = 992;
cStepSetJointStrDelay: INT: = 69;
cStepSetJointsStr: INT: = 70;
cStepSetJointsStrReset: INT: = 80;
cStepSetJointsStrError: INT: = 993;
cStepEnd: INT: = 300;
cStepWaitReset: INT: = 999;
END_VAR
VAR
aSplit: ARRAY [1 . .[11] of string (80);
bResultSplit: BOOL;
调试: BOOL;
URL:字符串:= ' http://192.168.3.42:8091 ';
END_VAR
bConnected: = OPCUA_VirtualClient_RoboDK_Station.bConnected;
案例1 .步骤1
cStepWaitCmd:
如果启动,那么
iStep: = cStepInit;
bStart: = FALSE;
END_IF
cStepInit:
StationPointer: = 0;
对于i:=1到11
arrJoints[我]:= 0.0;
arrJointsFromStr[我]:= 0.0;
aSplit[我]:= ";
END_FOR
如果不是,OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
而不是opcua_virtualclient_robodk_station . getitem . error
而不是OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
而不是opcua_virtualclient_robodk_station . getjoints . error
而不是OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
而不是opcua_virtualclient_robodk_station . getjointsstr . error
而不是OPCUA_VirtualClient_RoboDK_Station.setJoints.bBusy
而不是opcua_virtualclient_robodk_station . setjoints . error
而不是OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
而不是opcua_virtualclient_robodk_station . setjointsstr . error
然后
iStep: = cStepGetItem;
END_IF
iStep: = cStepGetItem;
cStepGetItem:
如果OPCUA_VirtualClient_RoboDK_Station.getItem。bDone然后
iStep: = cStepGetItemReset;
Item_ID: = OPCUA_VirtualClient_RoboDK_Station.getItem.Item_ID;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getItem。bError然后
iStep: = cStepGetItemError;
END_IF
cStepGetItemReset:
如果不是,opcua_virtualclient_robodk_station . getitem . error
而不是OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
然后
iStep: = cStepGetJoints;
END_IF
cStepGetJoints:
如果OPCUA_VirtualClient_RoboDK_Station.getJoints.bDone
而不是OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
然后
iStep: = cStepGetJointsReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJoints。bError然后
iStep: = 991;
END_IF
cStepGetJointsReset:
如果不是,opcua_virtualclient_robodk_station . getitem . error
而不是OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
然后
iStep: = cStepGetJointsStr;
END_IF;
cStepGetJointsStr:
如果OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bDone
而不是OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
然后
iStep: = cStepGetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJointsStr。bError然后
iStep: = cStepGetJointsStrError;
END_IF
cStepGetJointsStrReset:
如果不是,opcua_virtualclient_robodk_station . getjointsstr . error
而不是OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
然后
iStep: = cStepSetJointStrDelay;
END_IF;
cStepSetJointStrDelay:
strJointsCommand: = ";strJointsCommand: = CONCAT (LREAL_TO_STRING (arrJointsCommand [1]), strJointsCommand);
strJointsCommand: = CONCAT (strJointsCommand ', ');
strJointsCommand: = CONCAT (strJointsCommand LREAL_TO_STRING (arrJointsCommand [2]));
strJointsCommand: = CONCAT (strJointsCommand ', ');
strJointsCommand: = CONCAT (strJointsCommand LREAL_TO_STRING (arrJointsCommand [3]));
strJointsCommand: = CONCAT (strJointsCommand ', ');
strJointsCommand: = CONCAT (strJointsCommand LREAL_TO_STRING (arrJointsCommand [4]));
strJointsCommand: = CONCAT (strJointsCommand ', ');
strJointsCommand: = CONCAT (strJointsCommand LREAL_TO_STRING (arrJointsCommand [5]));
strJointsCommand: = CONCAT (strJointsCommand ', ');
strJointsCommand: = CONCAT (strJointsCommand LREAL_TO_STRING (arrJointsCommand [6]));
TON2 (: = TRUE, PT: = T # 0.2秒);
如果TON2。问那么
TON2 (: = FALSE);
iStep: = cStepSetJointsStr;
END_IF
cStepSetJointsStr:
如果(
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bDone
而不是
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
)
还是不写
然后
iStep: = cStepSetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
然后
iStep: = cStepSetJointsStrError;
END_IF
cStepSetJointsStrReset:
bWrite: = FALSE;
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bExecute: = FALSE;
如果不是,opcua_virtualclient_robodk_station . setjointsstr . error
而不是OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
然后
iStep: = cStepEnd;
END_IF;
cStepEnd:
吨(:= TRUE, PT: = T # 0.1秒);
如果吨。问那么
吨(:= FALSE);
如果没有调试,则
iStep: = 10;
其他的
iStep: = cStepSetJointStrDelay;
END_IF;
END_IF
cStepGetItemError:
Item_ID: = 0;
iStep: = cStepWaitReset;
cStepGetJointsError:
对于i:=0到11
arrJoints[我]:= -99999.99;
END_FOR
iStep: = cStepWaitReset;
cStepGetJointsStrError:
strJoints: = ";
iStep: = cStepWaitReset;
cStepWaitReset:
如果布雷塞,那么
iStep: = cStepInit;
bReset: = FALSE;
END_IF;
END_CASE
aSplit[1]:= strjoint;
对于i:=1到7
bResultSplit:= FindAndSplit(
pSeparator:= ADR(sSeparator)
,pSrcString:= ADR(aSplit[i])
pLeftString: = ADR (aSplit[我])
,nLeftSize:= SIZEOF(aSplit[i])
pRightString: = ADR (aSplit (i + 1))
,nRightSize:= SIZEOF(aSplit[1 +1])
,bSearchFromRight:= FALSE);
如果不是bResultSplit,那么
退出;
END_IF
END_FOR
对于i:=1到6
arrJointsFromStr[我]:= STRING_TO_LREAL (aSplit[我]);
END_FOR;
//
OPCUA_VirtualClient_RoboDK_Station.getItem (
bExecute: = iStep = cStepGetItem
Item_Name: = Robot_name
);
OPCUA_VirtualClient_RoboDK_Station.getJoints (
bExecute: = iStep = cStepGetJoints
Item_ID: = Item_ID关节= > arrJoints
);
OPCUA_VirtualClient_RoboDK_Station.getJointsStr (
bExecute: = iStep = cStepGetJointsStr
Robot_name: = Robot_name关节= > strJoints
);
如果写的话
OPCUA_VirtualClient_RoboDK_Station.setJointsStr (
bExecute: = TRUE
Robot_name: = Robot_name关节:= strJointsCommand);
END_IF;
这个示例将向您展示如何将OPC-UA客户端连接添加到RoboDK。RoboDK包含一个OPC-UA插件,允许您添加OPC UA兼容性到您的RoboDK项目。
在本例中,您将学习如何通过OPC UA客户端从RoboDK站获取数据。

进入工位参数界面,按“Clear All”键可删除所有工位参数。

我们可以在配置和启动OPC UA服务器的情况下创建另一个RoboDK项目。

本节介绍如何添加OPC UA客户端。
输入终端URL,例如:opc.tcp://127.0.0.1:48441。
您需要将IP地址和端口配置与目标OPC UA服务器相匹配。

按“连接”建立连接。
如果有“检索到的服务器变量”的消息。右键单击站点项目并选择“站点参数”以查看变量。,则连接建立。

右击你的电台,选择“电台参数”。

可以查看每个节点的详细信息节点部分。

在RoboDK中通过OPC UA客户端从OPC UA服务器获取节点数据后,您还可以使用RoboDK- python - api获取这些数据。
您可以参考此链接安装RoboDK Python-API。
//www.sinclairbody.com/doc/en/PythonAPI/intro.html#how-to-install
或者手动安装Python的robodk包:
PIP安装robodk
这个示例脚本展示了如何通过RoboDK的Python API获取站点参数。
# robodk API
RDK = robolink.Robolink()
从robodk导入* # robodk API
从robolink导入* #机器人工具箱
itemlist = RDK.ItemList
如果itemlist:
#获取所有站点参数
print('您的工作站中配置了有效参数…')
StationParameters = RDK.getParams ()
对于StationParameters中的StationParameter:
print("站点参数%s: %s"%(StationParameter[0],str((StationParameter[1]))))) .
其他:
print('No Parameter list..')
下面是示例脚本的结果:
在您的站点中配置有效参数。
工作站参数RoboDK: RoboDK 64 bit v5.5.3.23031
站点参数时间:2023年2月14日03:58:29.191.000.000
站点参数SimulationSpeed: 13.8551
站点参数站点:MyTestStation