一般建议
您可以在RoboDK中使用模型机构或机器人工具对平行夹持器进行建模。平行夹持器也被称为两指夹持器,它允许机器人抓取零件。
按照以下步骤在RoboDK中设置您的3D模型:
1.导入您的3D模型:拖放STEP文件将其加载到您的站点(也可以使用IGES或STL文件)。
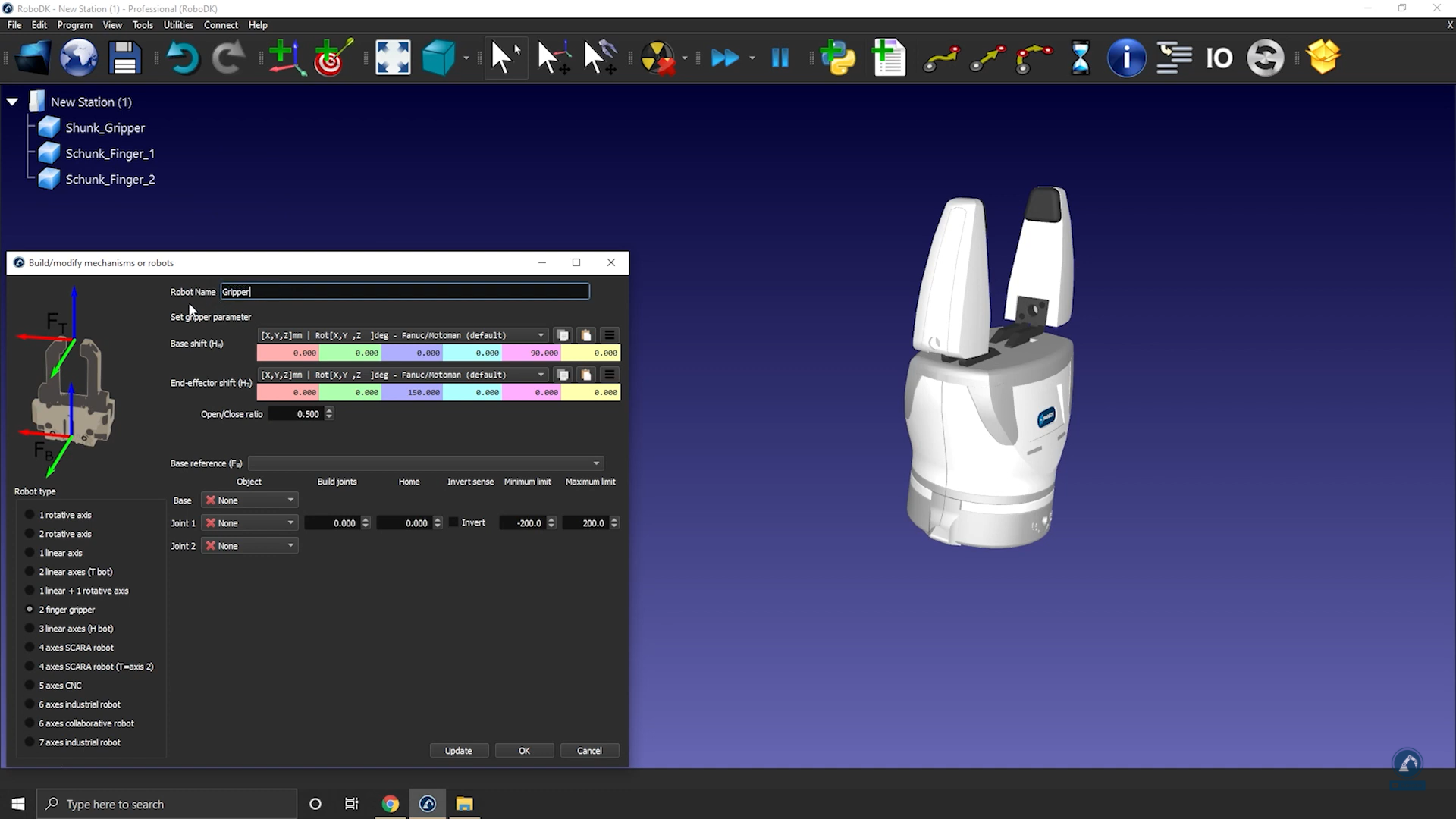
2.打开机制生成器:公用事业公司➔模型机构或机器人.
3.选择2手指夹在“机器人类型”下。
4.你可以重命名你的机器人“爪”。
按照这些步骤来定位你的基础框架:
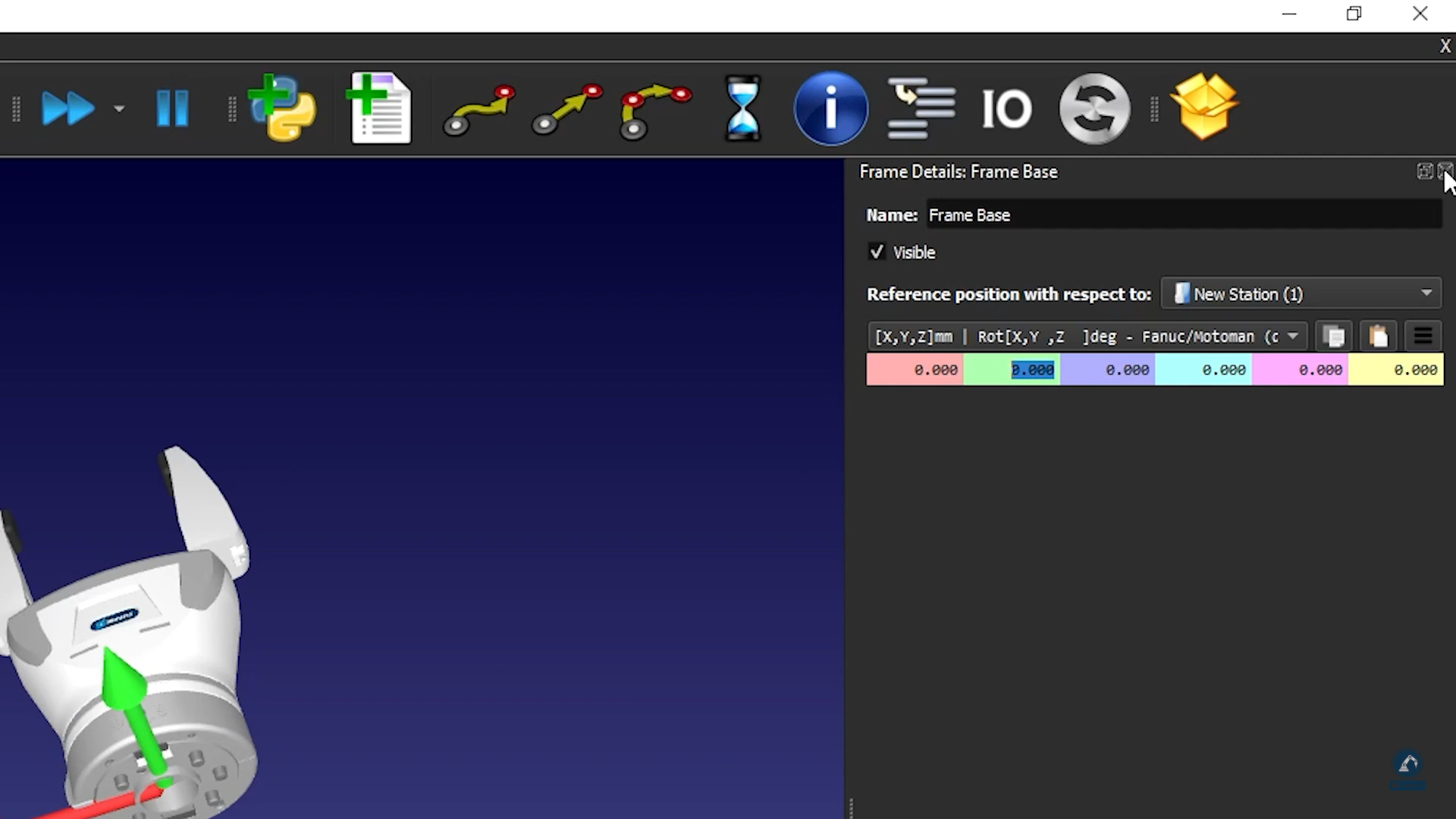
5.创建一个参考框架(它应该在夹具下面),并将其重命名为框架基础.
6.确保你刚刚创建的框架是根据图像定位的:将参考框架移至0.000 mm (X,Y,Z)。
7.进入抓手的运动范围如果你把手指放在0的位置,最小限位是0,最大限位是80。
8.选择更新。
9.确保它在正确的方向上移动,并且通过使用关节轴啮合.
10.如果你对结果满意,你可以按好的。