一般建议
本节展示如何对单轴转盘进行建模。转盘常用于机器人加工应用。
按照以下步骤创建转盘:
1.加载转盘的3D模型:拖放3D模型到RoboDK窗口(如STL, STEP或IGES文件)。
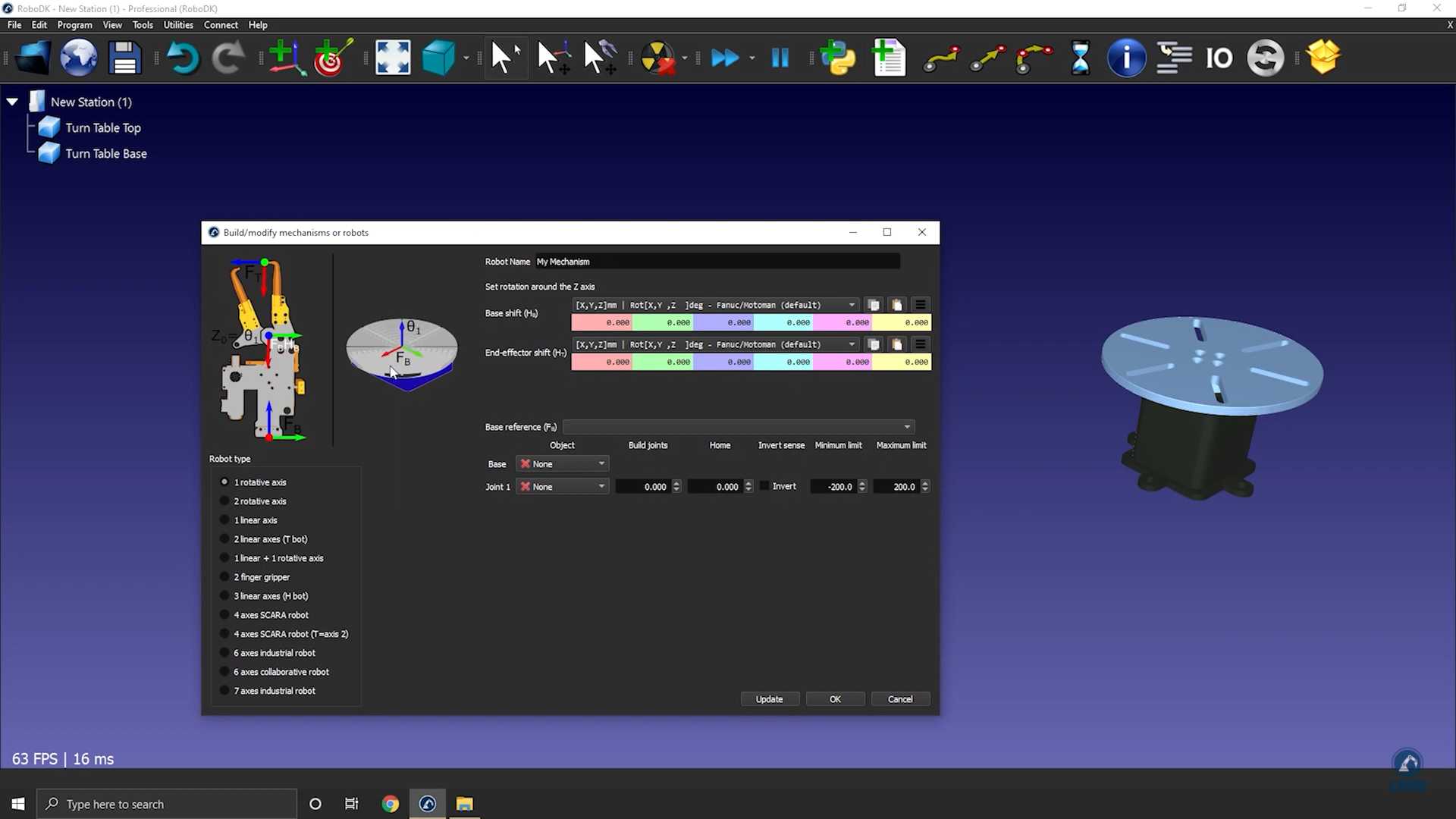
2.选择公用事业公司➔模型机构或机器人.
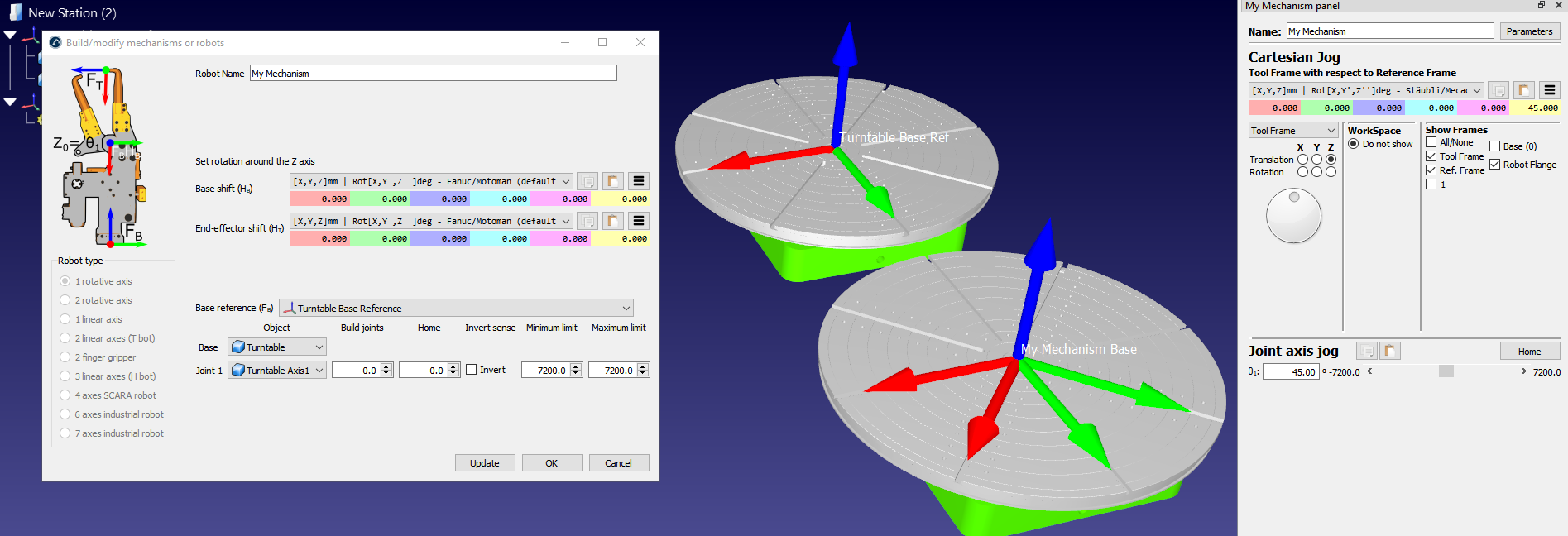
3.选择1旋转轴。
4.如果你看一下图像,它应该告诉你应该如何定位的基础和顶板。在旋转轴的情况下,该机构将围绕Fb(框架基座)的Z轴旋转。
5.将机制重命名为转盘。
通过创建一个新的坐标系统来定义转盘的参考:
1.创建一个参考框架,并选择F2将其命名为框架基础。
2.通过打开来修改框架的位置帧面板.
3.选择工具然后测量。
4.点击机构测量表面位置;你可以看到原点和中心的区别。你可以复制值和粘如下图所示。
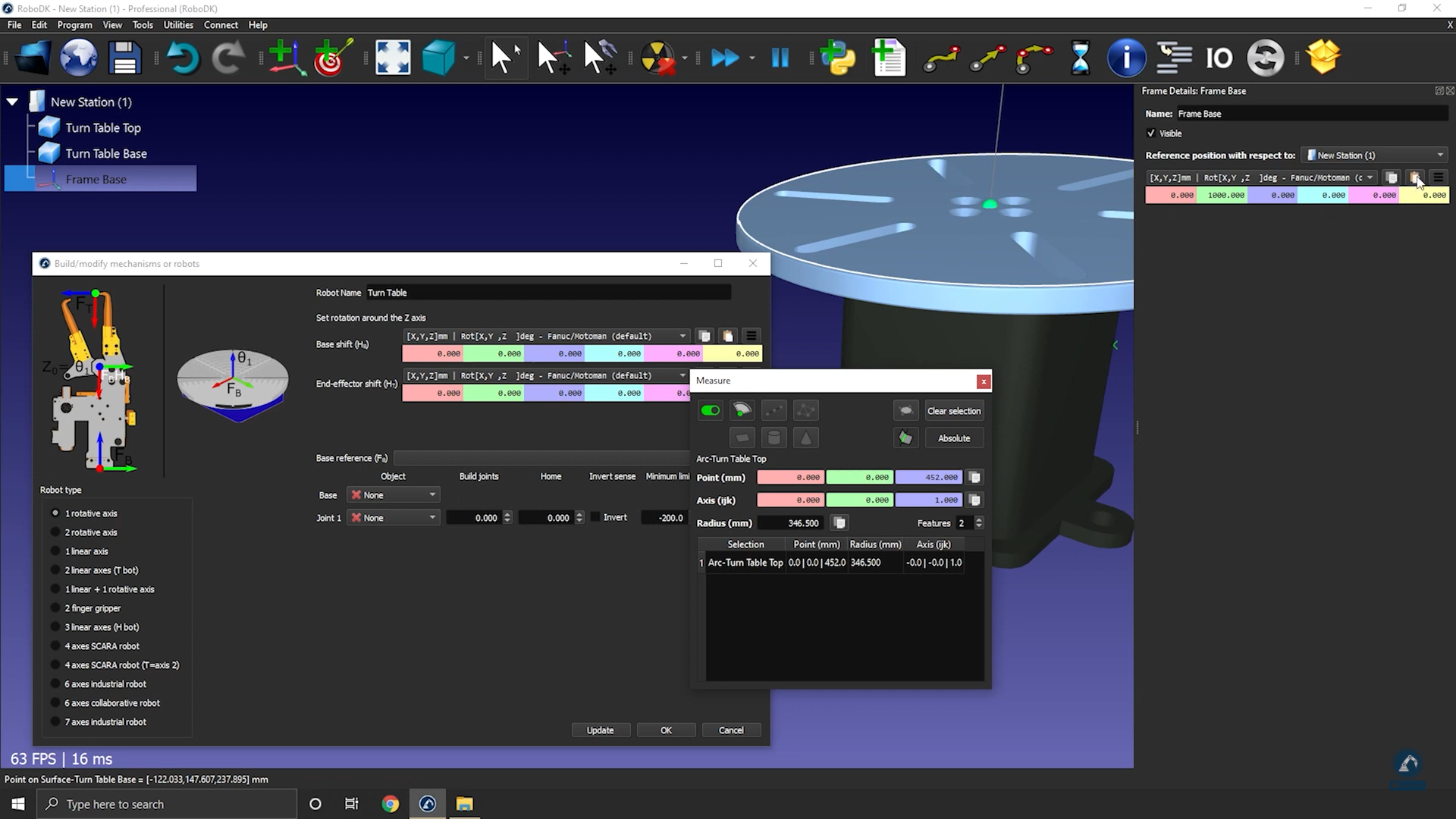
参考位置现在应该与图像中的参考相匹配。参考框架和对象项应该自动填充。如果自动选择不正确,您可以相应地更新它。
6.您可以更新关节极限,例如,如果我们想要有+/-20转,我们可以进入+/-7200度。您也可以稍后通过双击机器人面板的关节极限标签来更改关节极限。
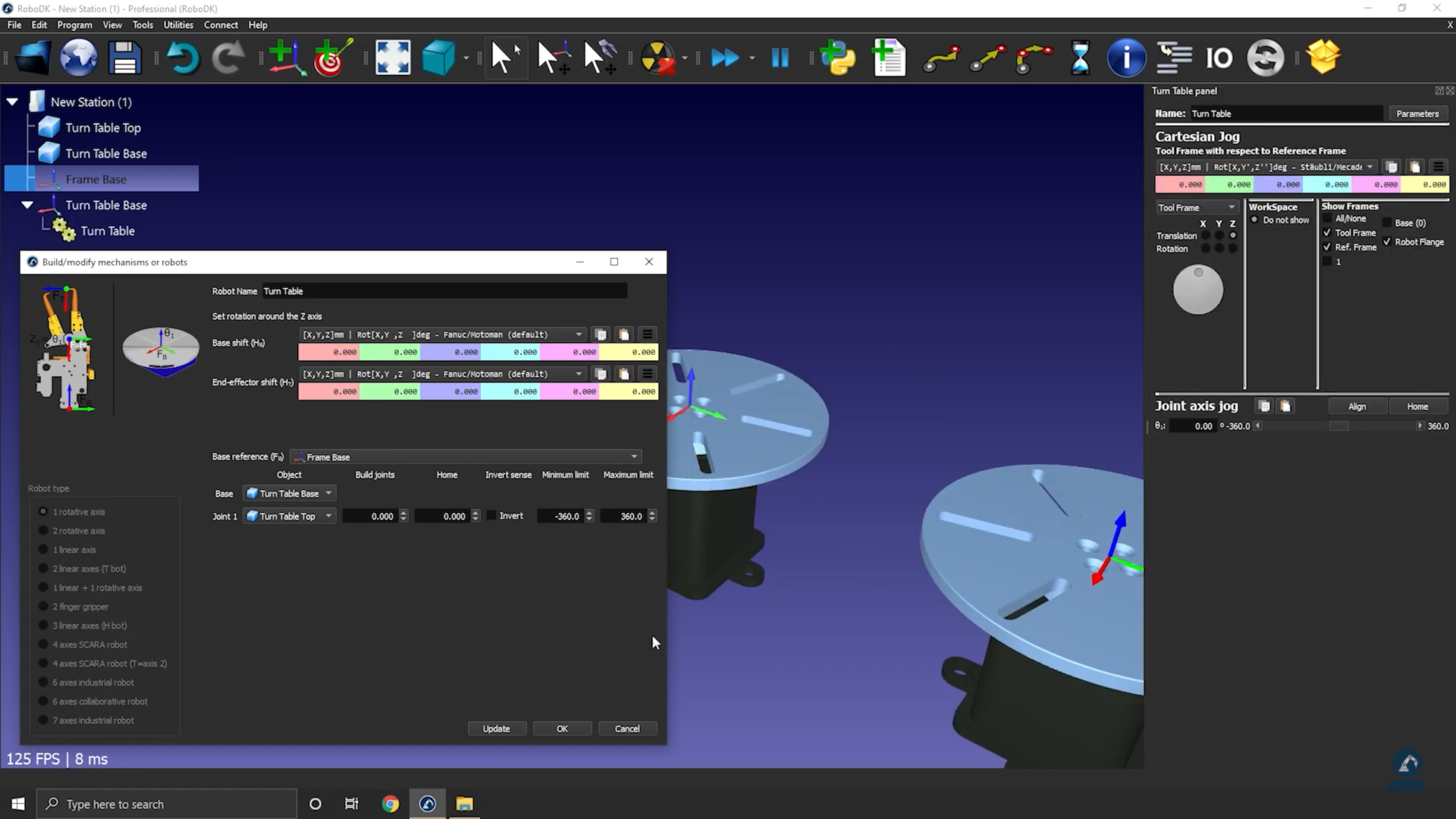
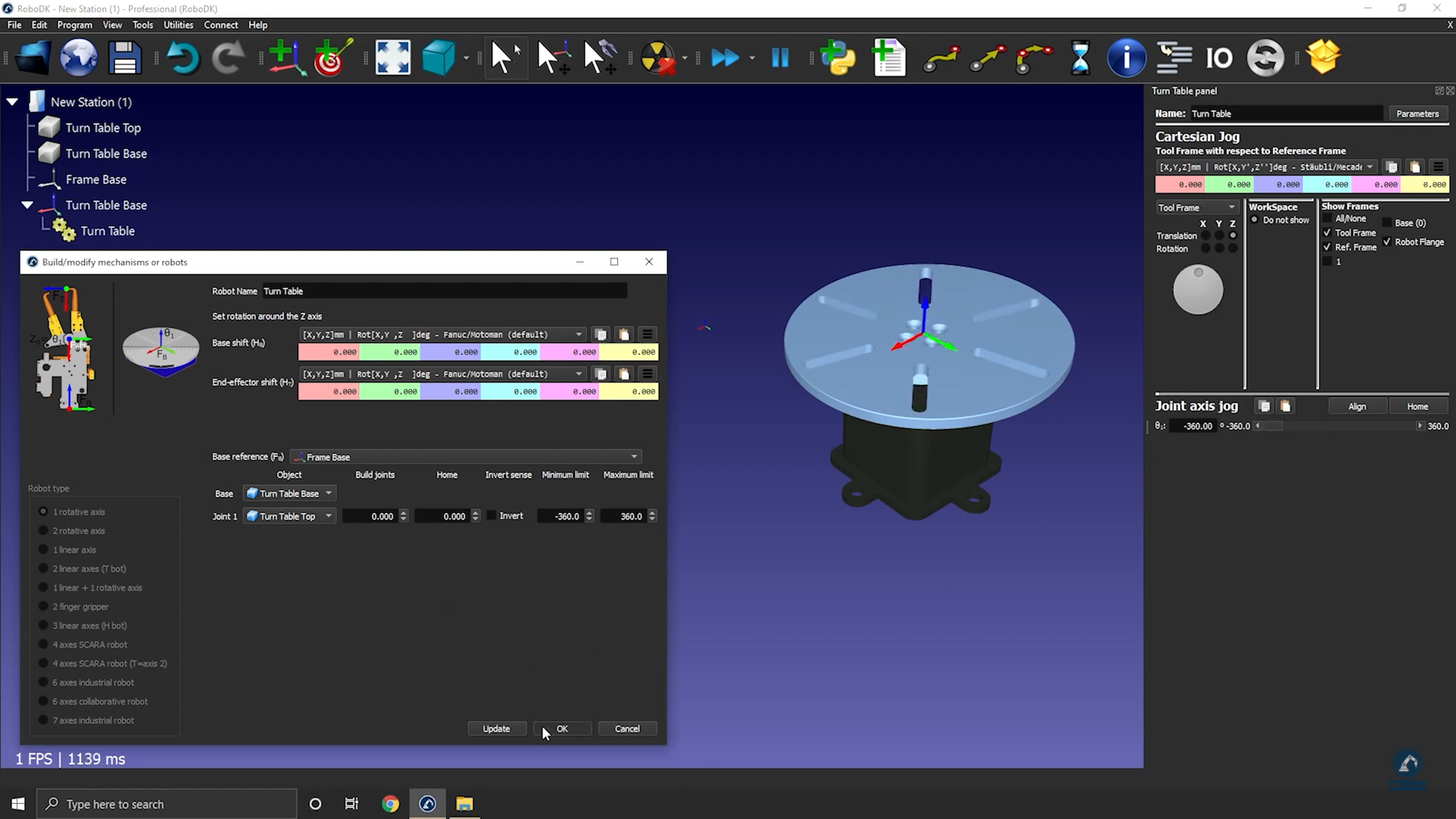
7.选择更新生成机制:新的机制就会出现。
8.如果需要,您可以选择OK关闭菜单或对转盘添加其他更改。
9.您可以删除用于创建该机制的原始目标文件。该机制将与您的RDK项目一起保存,并且它不需要任何外部依赖项。
10.一旦您测试了您的表(确保它在正确的方向上移动并且限制是您所期望的),您就可以选择OK在模型的机制窗口关闭它。
单轴校准程序准确地放置一个转盘相对于机器人。