一般建议
这个例子展示了如何使用制造商提供的3D模型从零开始建模一个6轴工业机器人手臂。世界杯2022美洲预选赛直播
按照以下步骤收集机器人的一些信息:
1.首先,您需要3D模型(例如STEP或IGES文件)。
2.您还需要机器人数据表或机器人手册。
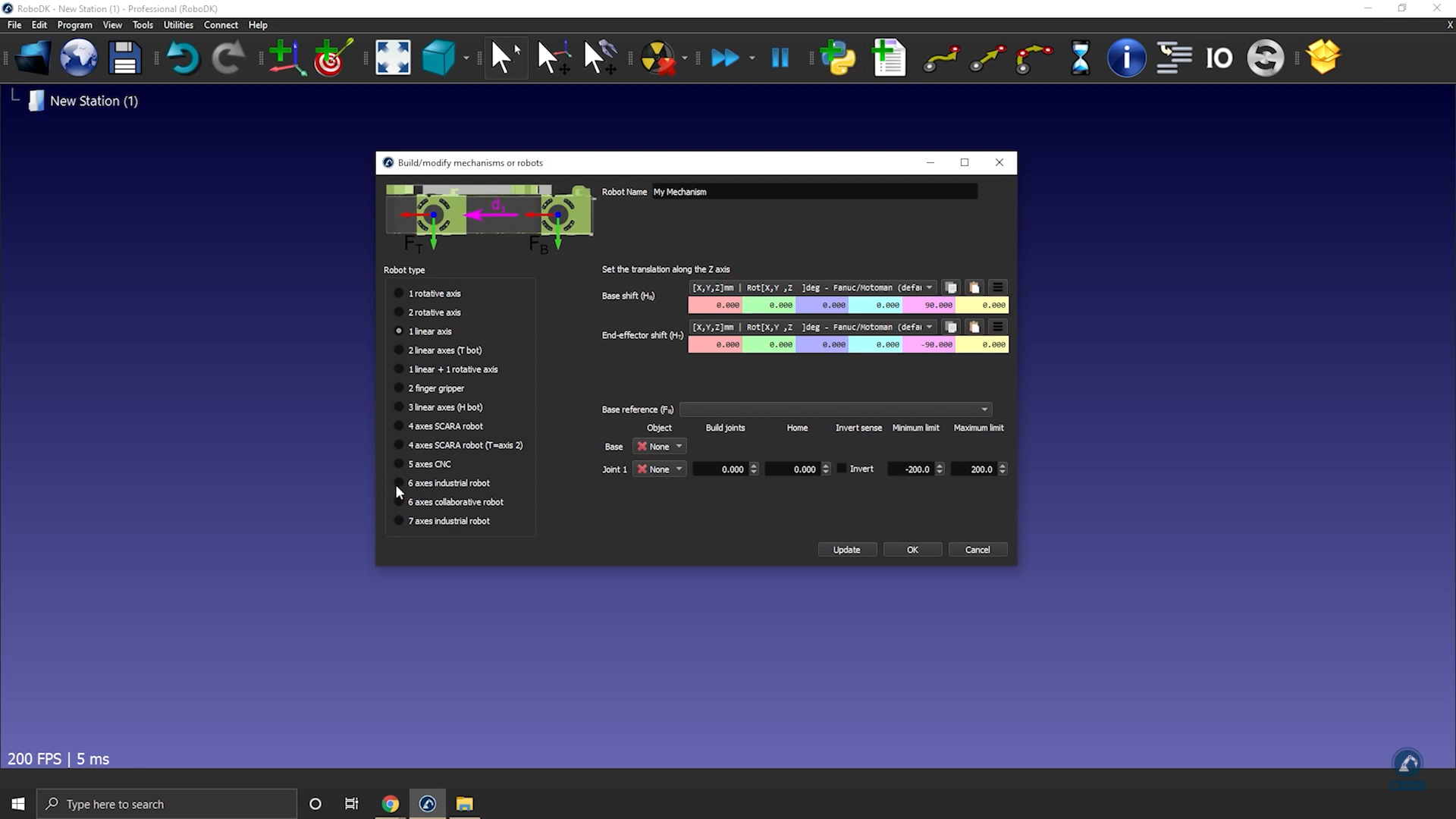
按照以下步骤在RoboDK中打开机器人模型窗口:
3.选择公用事业公司➔模型机构或机器人。
4.下机器人类型中,选择六轴工业机器人世界杯2022美洲预选赛直播。
通过以下操作将机器人3D文件加载到RoboDK:
5.拖放你的机器人进入RoboDK或选择文件然后开放(加载可能需要几秒钟)。
按照以下步骤将一个对象分成不同的部分,这样我们就可以单独处理每个部分:
6.如果您下载的CAD文件是在一个单一的对象,您可以取2022世界杯国家队名单消分组的对象(STEP文件)右键单击任何对象并选择分割对象。
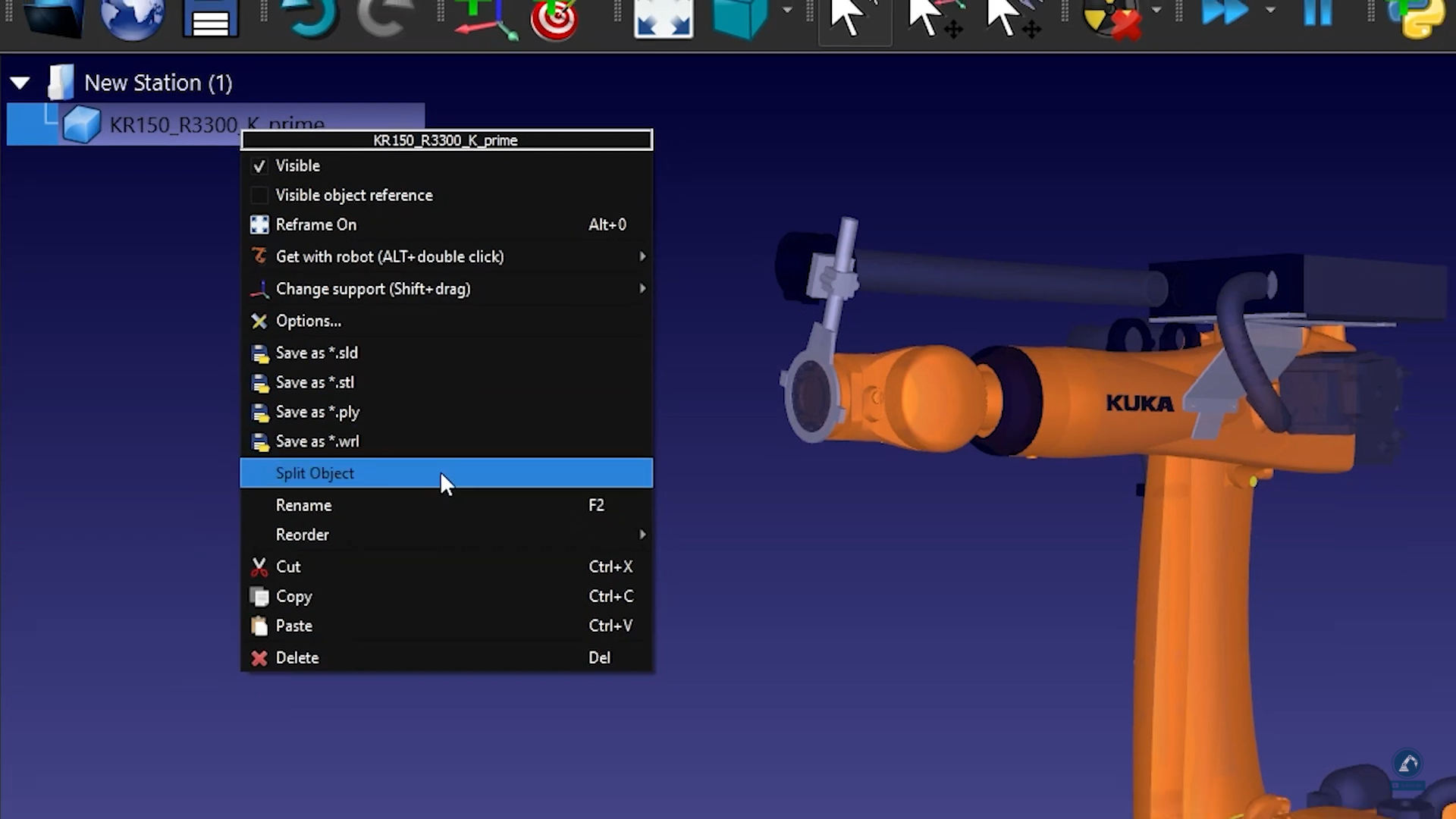
7.然后,您可以重新组合它,以创建机器人的不同部分。
按照以下步骤在RoboDK中输入机器人运动学信息:
8.输入你的机器人的名字机器人的名字。
9.如果机器人的各个部件的顺序正确,那么所有的3D模型都应该被正确填充。否则,您可以手动将每个对象链接到正确的机器人关节。
10.填入机器人的尺寸打开数据表。
11.在数据表的3D草图上,您将找到您正在寻找的所有值。在RoboDK中填写正确的值。
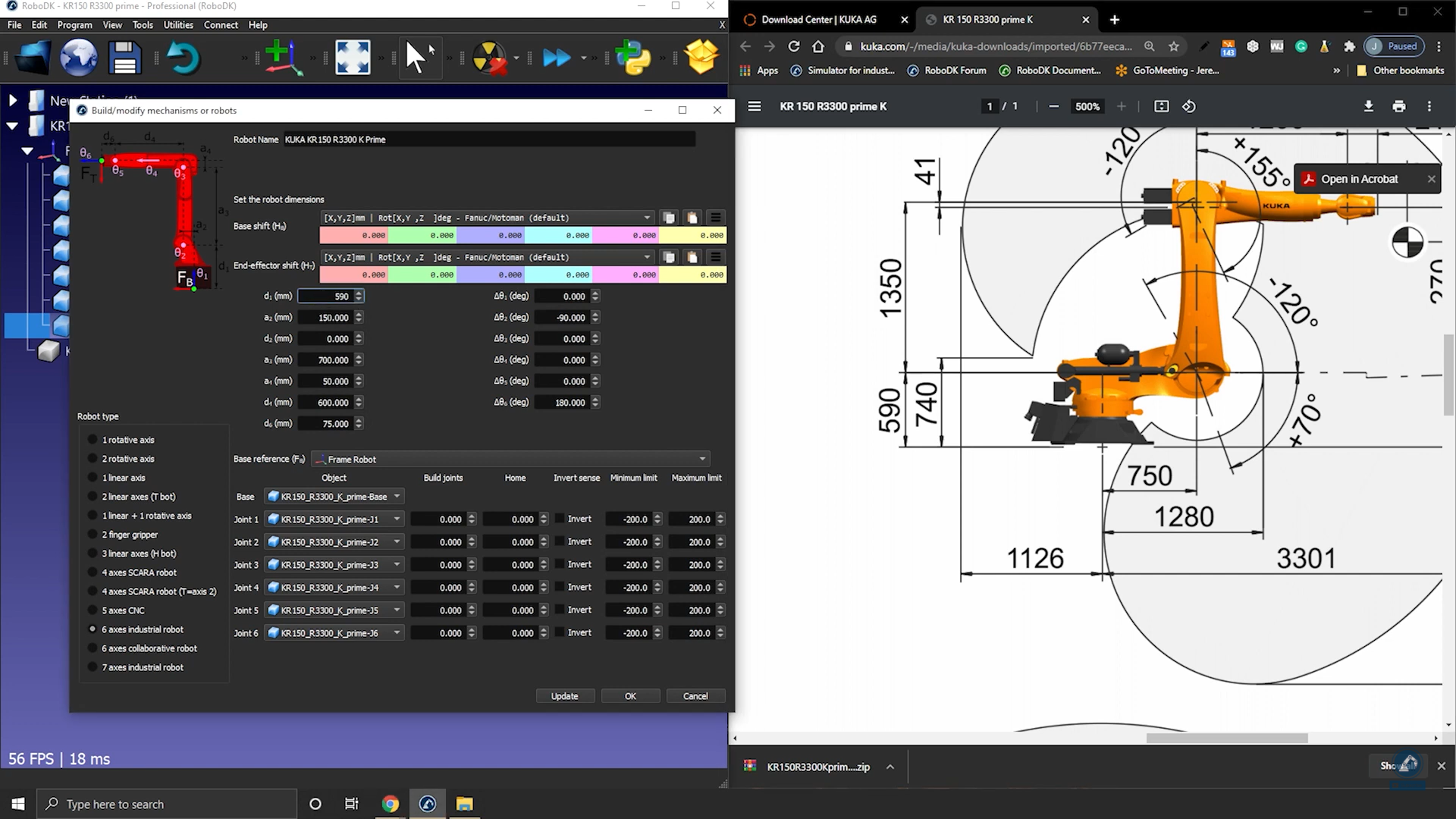
12.一旦您对机器人的运动学结果感到满意,选择更新。