一般建议
这个例子展示了如何建模一个2轴线性轨道,也被称为线性轴或线性轨道。线性轴用于扩展机器人手臂的伸展。
按照以下步骤在RoboDK中设置您的3D模型:
1.将您的3D模型导入RoboDK➔拖放STEP文件进入你的位置。
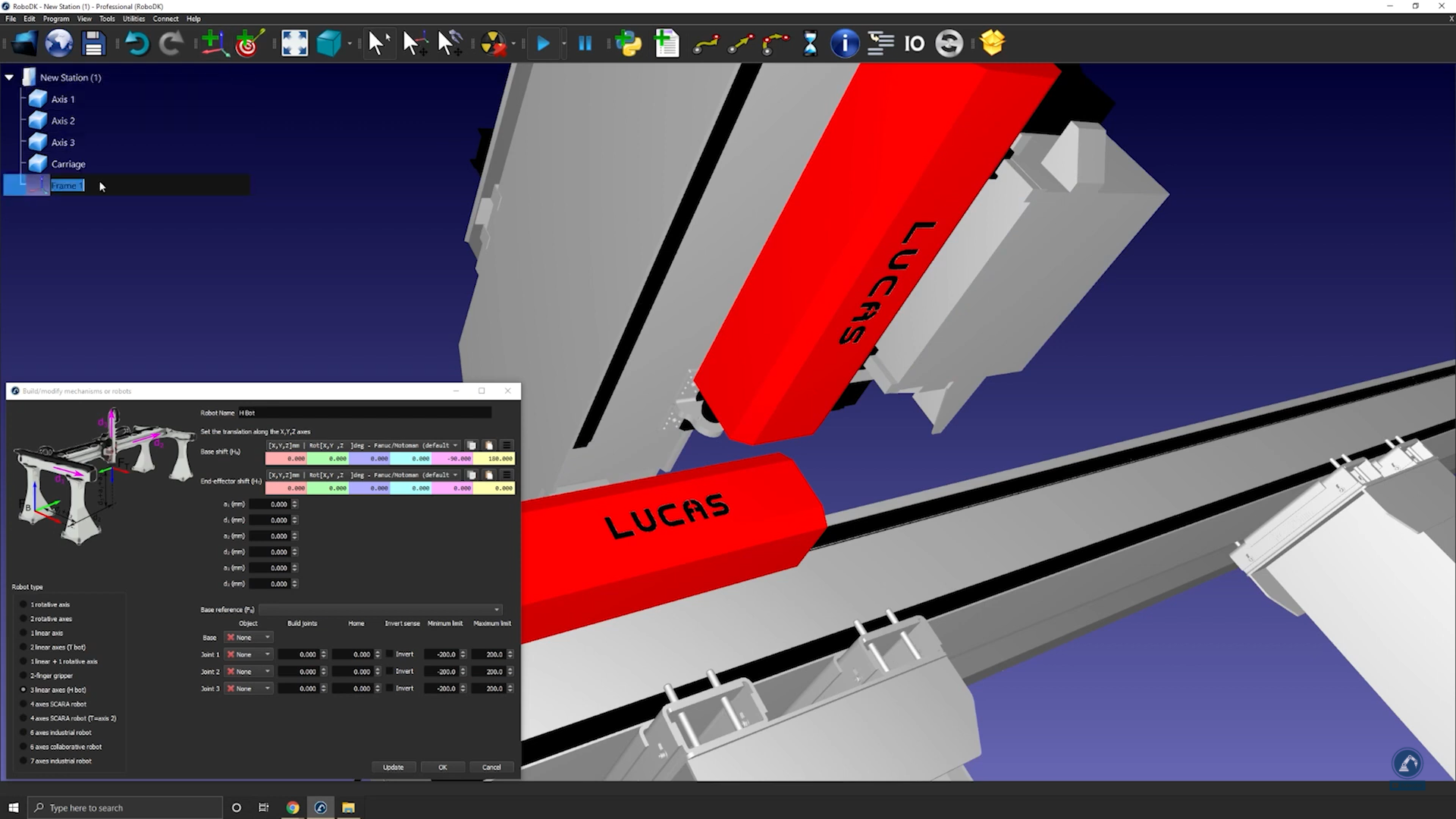
2.打开机制构建器:公用事业公司➔模型机构或机器人。
3.在“机器人类型”下选择2-线轴(T-bot)。
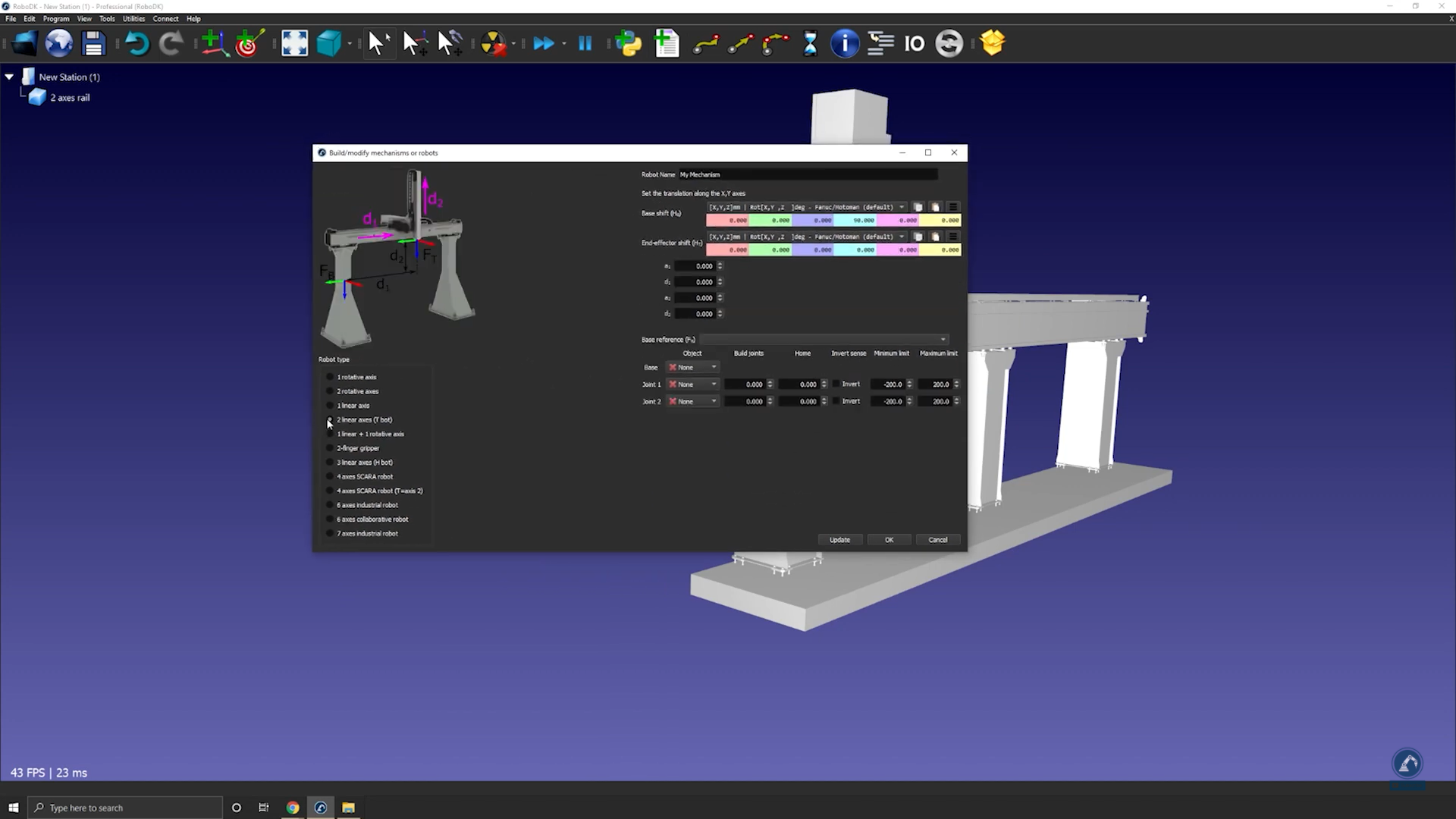
4.一旦你的模型被分成3个部分,重新打开轨道生成器:选择公用事业公司➔模型机构或机器人。
5.选择选项:2-线轴(T-bot)。
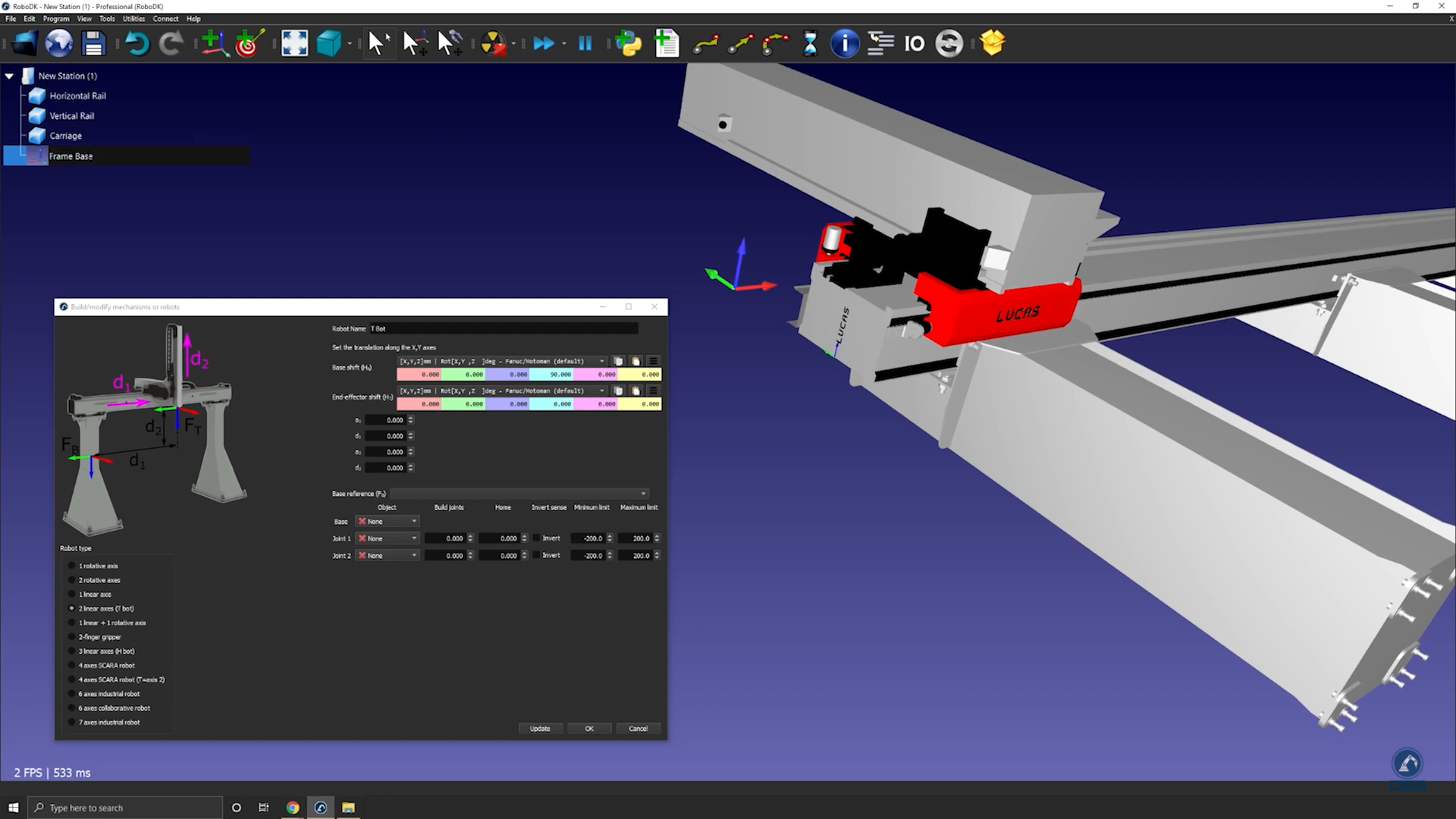
6.将机器人重命名为T-bot(以机器人的名字)。
按照以下步骤找到您的基础框架的位置:
7.如果您认为您的基础框架应该在轨道的0位置,创建您的参考框架正好在那里,并将其重命名为框架基础.
按照以下步骤修改框架的位置:
8.打开框架面板双击框架.
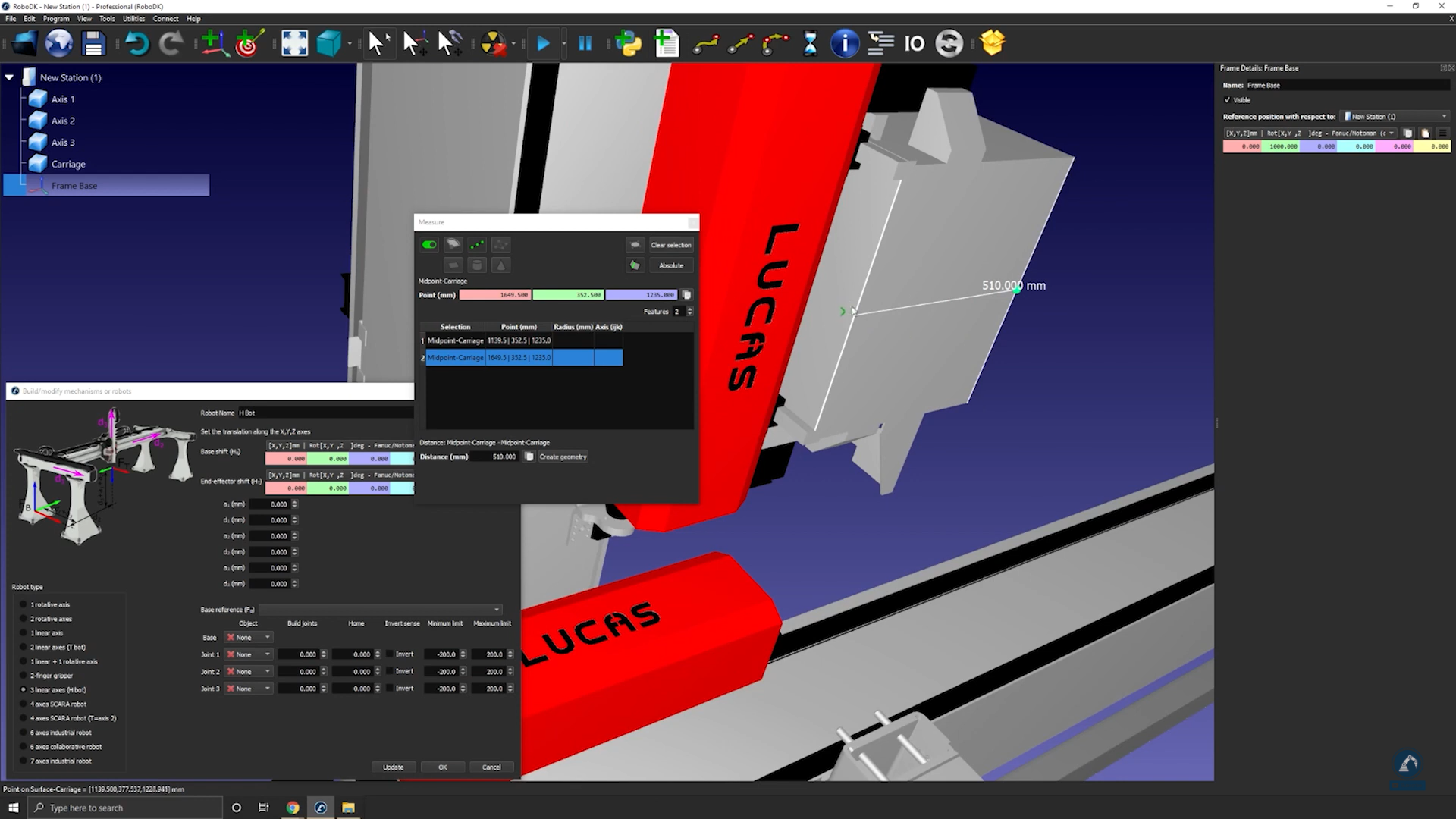
9.打开测量工具测量表面中心的位置:工具➔衡量。
10.选择每条边的中心点(如下图所示)来求两条线之间的距离。
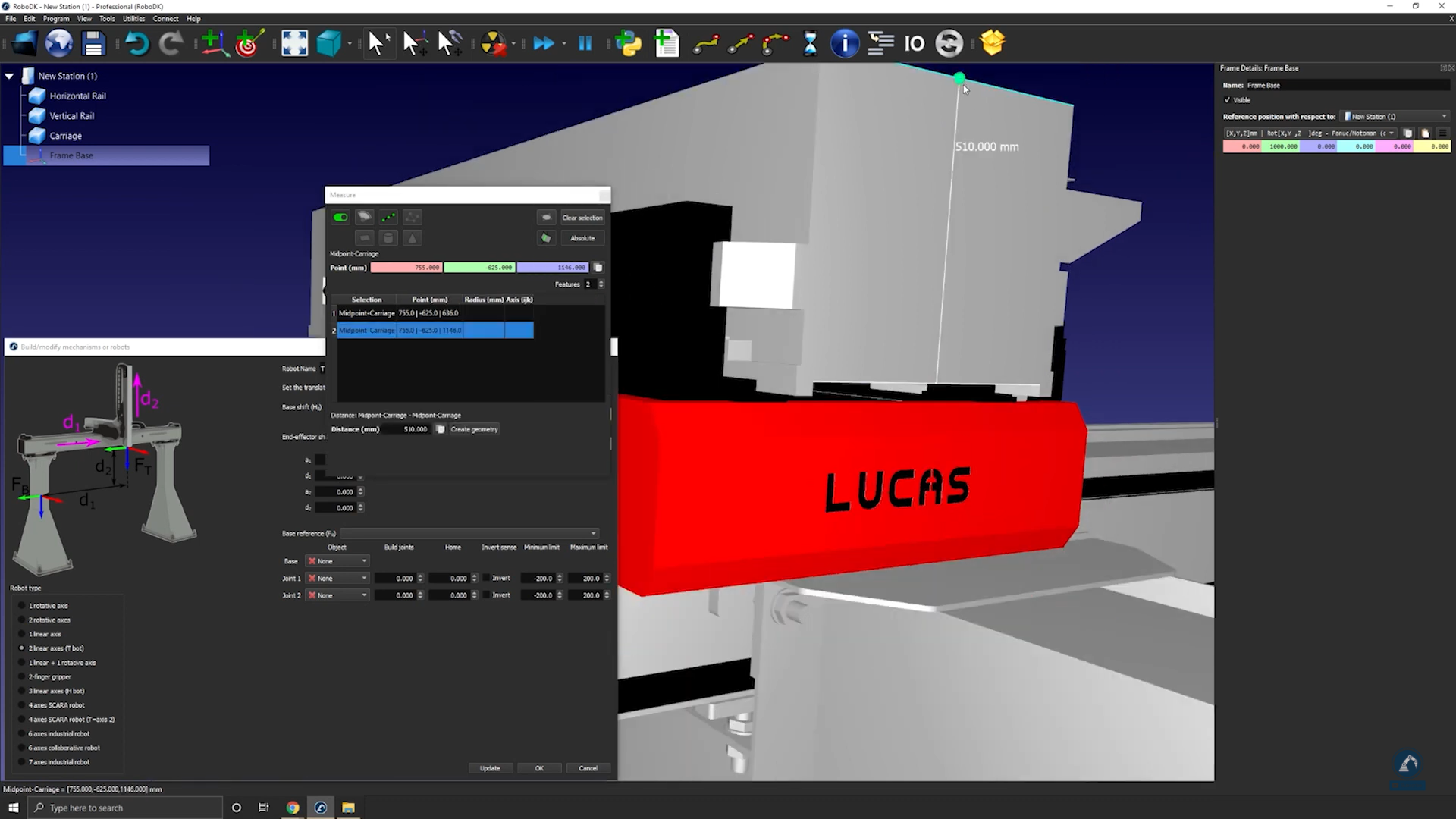
11.选择创建几何在测量窗口,将在两点之间创建一条线。
12.选择明确的选择。
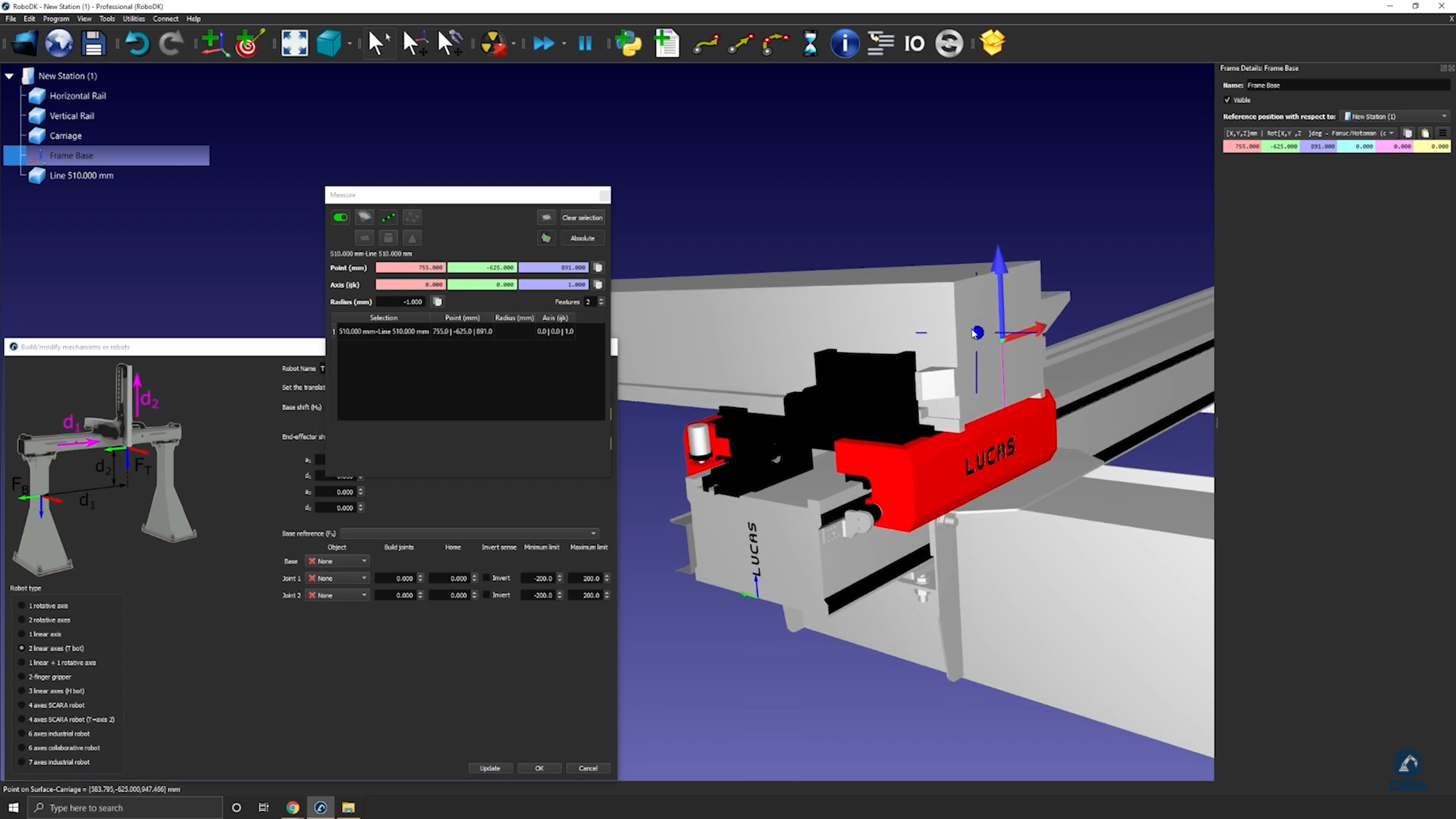
按照以下步骤测量两条线之间中心点的位置:
13.选择线的中心点。
14.复制值在测量窗口,粘贴值作为框架位置(如下图所示)。
遵循以下步骤确保方向相同:
15.绕X逆时针旋转90度,然后绕Z轴旋转90度(如下所示)。
16.输入测量值在“模型机构或机器人”窗口中选择导轨,如下图所示。
17.选择更新来创造机器人。
18.如果您对结果满意,请选择好吧在“模型机构或机器人”窗口中。