一般建议
一旦你有一个模拟/程序准备在RoboDK,你可以很容易地导出它作为一个共享的RoboDK的Web链接,作为一个3D HTML或3D PDF。
您可以按照以下步骤为Web公共链接,3D HTML和3D PDF文档生成RoboDK:
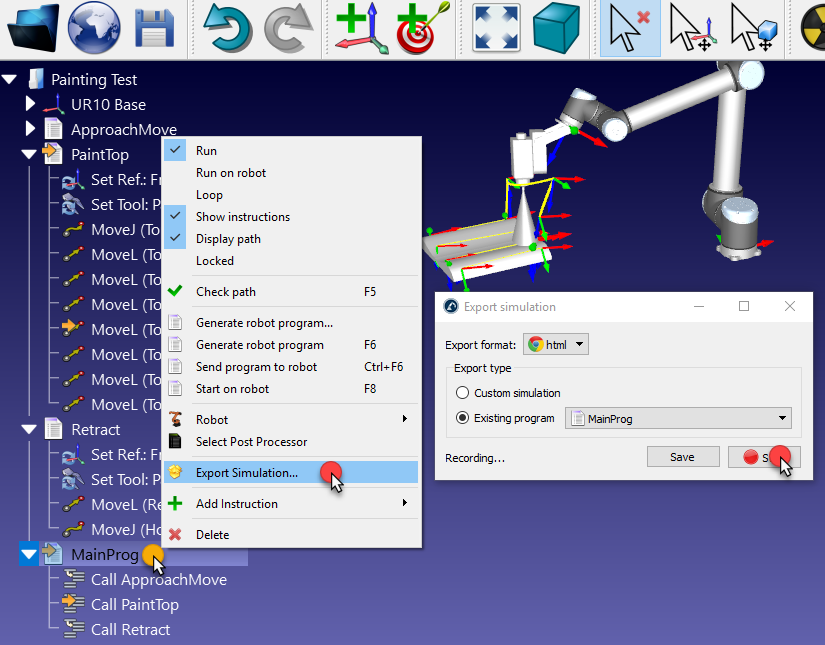
1.右键单击您的程序(主程序在这个例子中)
2.选择![]() 出口仿真……
出口仿真……
3.选择开始.程序将开始,模拟将记录,直到程序完成。
4.保存文件。保存文件后,它将自动打开,您可以预览结果。
HTML和PDF模拟保存为一个文件。压缩HTML文件将显著减小其大小。PDF模拟必须用Acrobat Reader(而不是浏览器)打开。
以下链接是导出的示例Web版RoboDK链接:
●导出的RoboDK项目示例:https://web.www.sinclairbody.com/lnk/35303930233736
●打开这个链接//www.sinclairbody.com/example/Assembly-and-Palletizing-with-ABB-and-Fanuc并选择切换3D视图。
●您可以选择任何站点库示例的详细信息,并选择切换3D视图来预览RoboDK中的Web项目。
以下链接是3D HTML模拟的示例:
●//www.sinclairbody.com/simulations/UR-Paint.html
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.html
●//www.sinclairbody.com/simulations/Robot-Drawing.html
以下链接是3D PDF模拟的示例:
●//www.sinclairbody.com/simulations/UR-Paint.pdf
●//www.sinclairbody.com/simulations/Welding-3-Fanuc-Robots.pdf
●//www.sinclairbody.com/simulations/Milling-with-External-Axes.pdf
您可以将您的RoboDK模拟导出到Blender以创建逼真的图像和动画。Blender是一个免费的开源3D动画和渲染软件。RoboDK提供了在Blender中加载模拟的能力,包括彩色对象和动画序列。
Blender导出选项将在导出模拟窗口中添加Blender导出格式。

要将导出的RoboDK模拟导入到Blender,请遵循以下步骤:
1.打开搅拌器。
2.使用“General”默认模板,并删除包含的对象(多维数据集)。
3.可选地,打开系统控制台窗口➔切换系统控制台
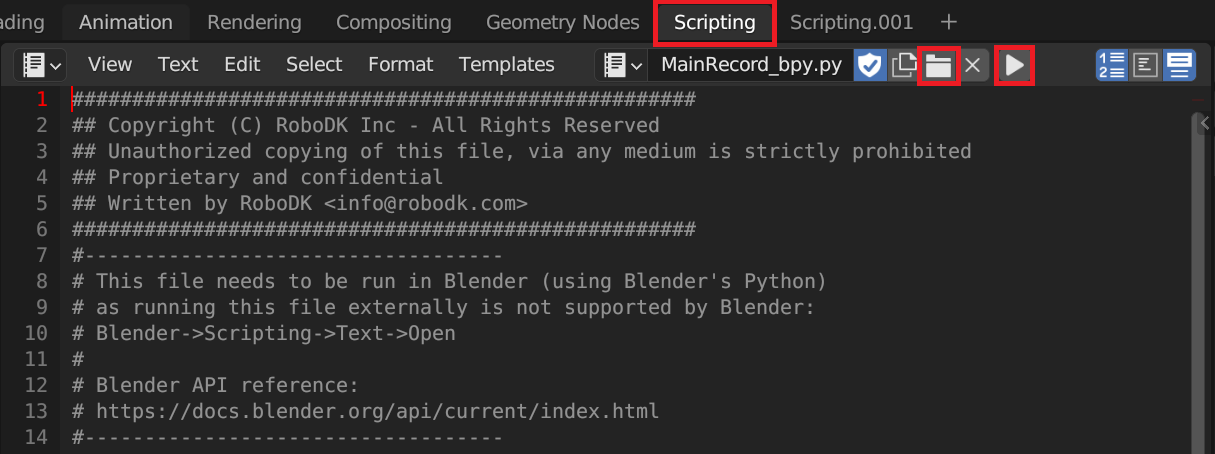
4.导航到脚本视图并打开以" _bpy.py "结尾的Python文件,+➔一般➔脚本➔开放.
5.使用以下命令运行脚本脚本➔运行脚本或Alt + P.
6.等待脚本完成(检查系统控制台的活动)。根据模拟的大小,这个过程可能需要几分钟。
你可以在Blender中微调材料、渲染选项等,以获得最佳效果。RoboDK并没有为此提供专门的教程,但Blender作为一个强大的社区,拥有大量的教程。
要输出Blender渲染,请遵循以下步骤:
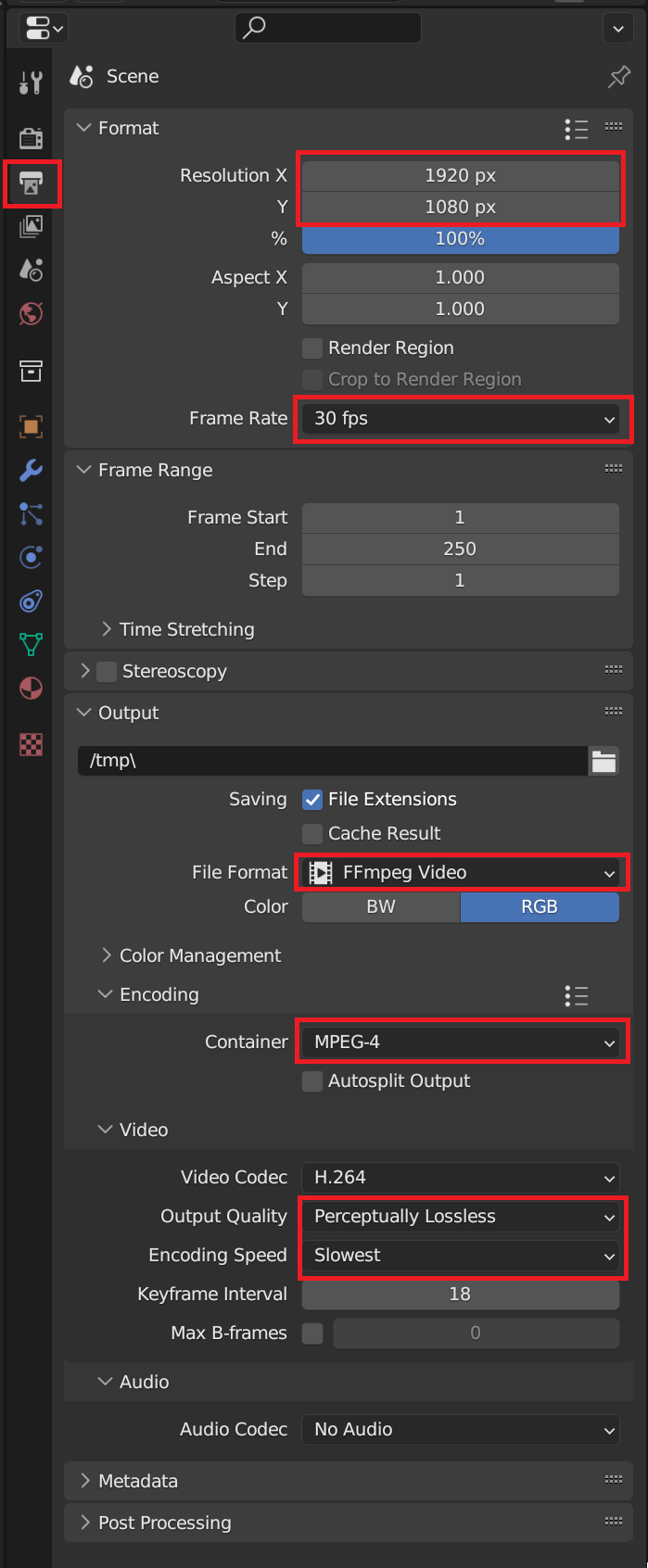
1.打开输出属性在侧边栏上。
2.设置分辨率和帧率格式。
3.设置的文件格式FFmpeg在输出.
4.将容器设置为mpeg - 4在编码。
5.设置输出质量为感知无损的而编码速度为最慢的在视频.
6.使用渲染➔渲染动画或CTRL + F12.
7.默认情况下,您的文件将保存在/tmp/中。