机器人工具或工具中心点(TCP)是用于将机器人移动到笛卡尔位置的点(例如给定XYZWPR值的笛卡尔目标)。TCP被定义为机器人法兰的转换。在任何机器人应用程序中,无论是否涉及离线编程,正确定义TCP都很重要。2022世界杯8强赛时间
按照以下步骤定义或校准机器人工具(工具中心点,或TCP):
1.选择公用事业公司➔ 定义工具框架(TCP)
定义工具框架(TCP)
2.选择工具来定义/校准。
或者,右键单击工具并选择![概览-图2]() 定义TCP.
定义TCP.
3.选择方法:
一个。用TCP的尖端触摸一个点,使用不同的工具方向(逐点校准XYZ)
b。用TCP触摸一个平面,使用不同的工具方向(通过平面校准XYZ)。TCP可以是一个点或球体。
![概览-图3]()
注意:
用不同的方向触摸同一点(第一种方法)是大多数机器人控制器在教学挂件上可用的相同方法。使用RoboDK可以更好地了解TCP错误。
注意:
如果需要计算球体的中心,建议使用平面来定义TCP。该方法自动检索触摸探针的中心。
4.使用关节值进行TCP校准是默认设置。如果你有笛卡尔目标,将其更改为姿势。
重要的是:
如果TCP是用位姿定义的,那么机器人法兰的位置必须提供一个相对于机器人基座或参考系的位姿(位置和方向)。中提供这些值的更多信息参考帧部分。
提示:
可以使用3或4种以上的配置来正确定义或校准TCP。这允许获得更准确的结果,并提供对TCP错误的良好估计。建议使用8个或更多的点来准确定义TCP,如果精度不重要,则使用3个点。
5.如果项目中有多个可用机器人,请选择机器人。
6.调整您想要用来校准TCP的点的数量。该值也可以稍后修改。
7.开始在表中填写测量的配置(接头值或法兰的位置和方向)。
8.最后,选择更新来应用RoboDK站中选择的新定位工具。
视频:
本视频展示了如何使用欧姆龙TM机器人正确校准机器人工具(TCP): https://www.youtube.com/watch?v=TM-9vGR2r4k&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=2。
提示:
配置列表可以手动填写,也可以使用复制/粘贴按钮(每行右侧)填写。
重要的是:
建议为每个关节值提供至少4个小数(当提供关节值时)。允许的十进制值的数量可以在工具中更改➔选项➔精度➔马克斯小数。
提示:
也可以选择得到p1以获得真实机器人到RoboDK的当前关节值。如果机器人驱动程序已经正确设置,您可以很容易地在PC上获得此位置。更多信息请参见机器人司机部分。
重要的是:
建议保留所提供值的单独副本。选择复制数据和粘贴数据复制/粘贴所有内容。
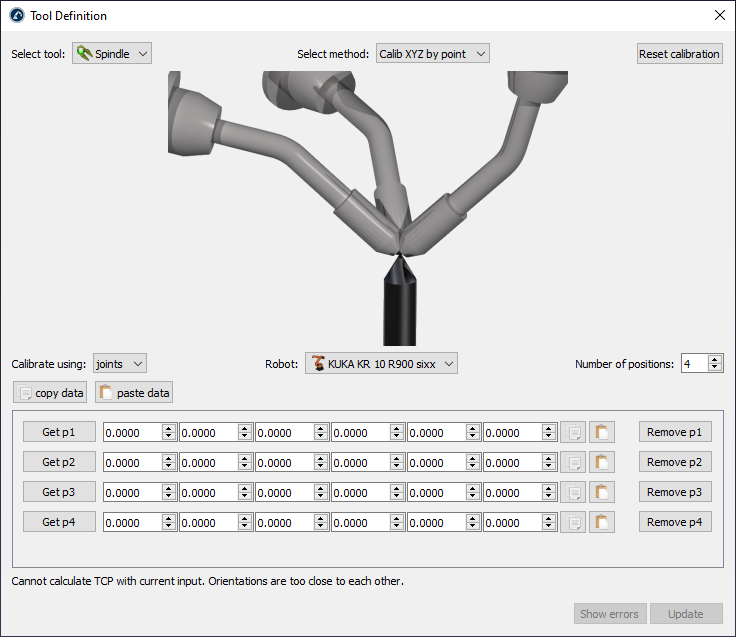
![概览-图4]()
注意:
一旦输入值,新工具(TCP)将自动计算。
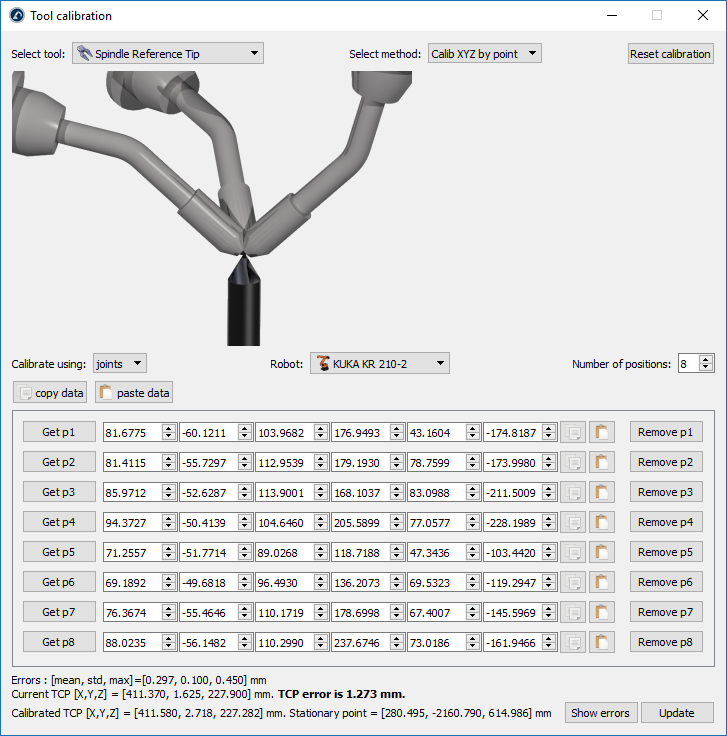
提示:
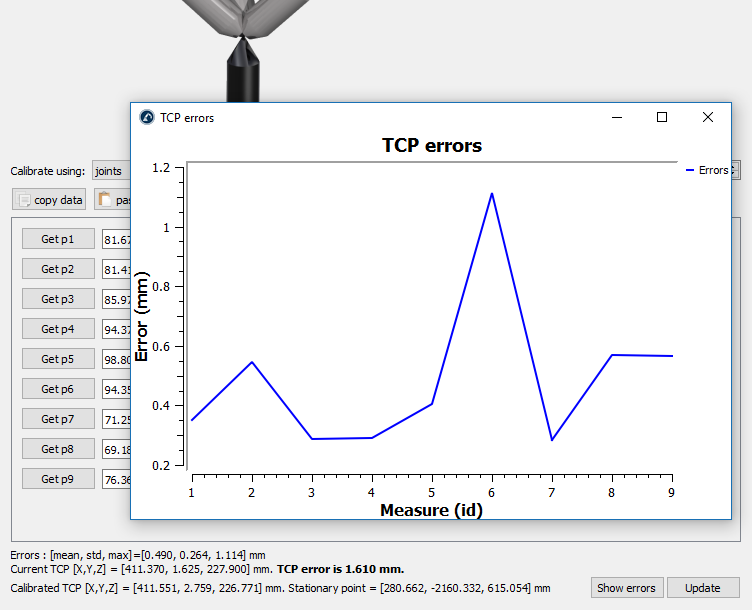
提供了一些有用的误差统计,如平均误差、标准偏差(std)和最大误差。选择显示错误显示一个图形,显示每个点相对于计算平均值的误差。由于该方法涉及大量手工操作,因此在特定点上引入错误是很常见的。为了隔离这些错误,我们可以迭代地删除与平均值相比显示更大错误的点。
作为示例,下面的图像显示了通过选择删除点6之前的错误删除p6按钮。
![概览-图5]()