一般建议
参考系定义了物体相对于机器人的位置(位置和方向)。建议根据您可以用机器人定义的参考来教授目标。参考框架允许您调整或移动您的程序到不同的位置,而不必重新教授所有的目标。
有关参考系的更多信息,请参见入门部分.
定义参考系需要使用机器人工具探测一些点(需要在特定位置检索关节值)。
按照以下步骤确定与机器人相关的参照系:
1.选择公用事业公司➔![]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![]() 定义参考系.
定义参考系.
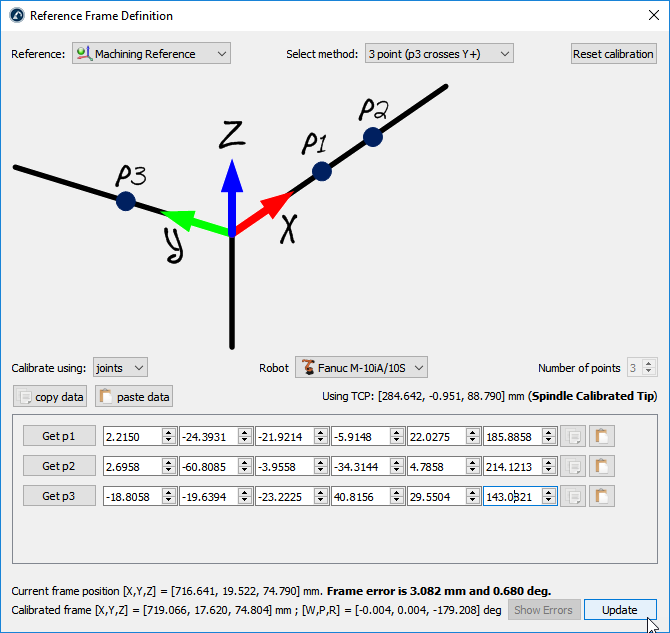
3.选择方法:
一个。3点法(用3理查德·道金斯横过Y+轴的点)
b。3点法(用1圣点为参考系的原点)
c。6个
d。转台校准选项允许在转台上定位参考框架,使转台轴正确对齐
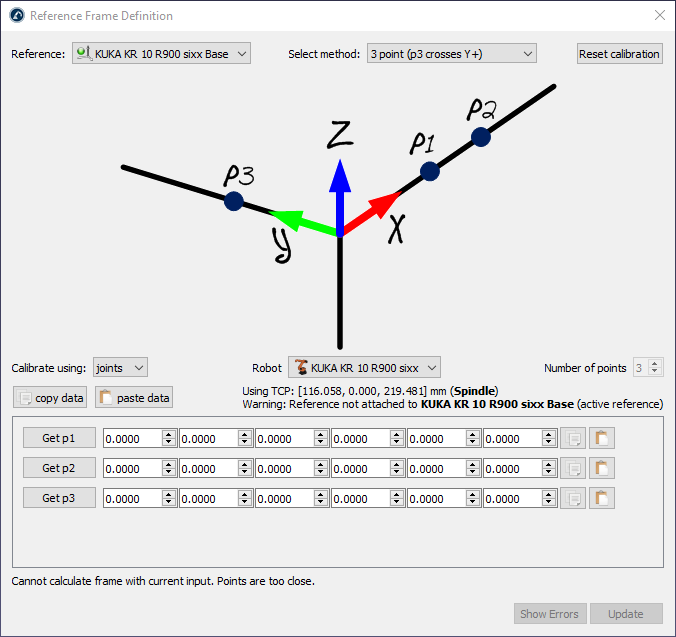
4.关节值被用作默认设置。如果你知道每个点相对于机器人基座的XYZ位置,就把它改成点。
5.如果有多个机器人可用,请选择该机器人。
6.开始用测量点(关节值或点)填充表格。
7.最后,选择更新将新位置应用于RoboDK站中选定的参考系。
本节解释了一个对象的参考系(坐标系)是如何根据其自身的几何形状进行对齐的。该部分允许将对象的参考框架移动到可以在实际设置中识别的位置。
遵循以下步骤,根据物体几何形状的特定点虚拟地对齐物体的参考框架:
1.加载对象
2.选择活动的![]() 站
站
3.选择程序➔![]() 添加参考系.
添加参考系.
确保参考帧直接连接到站点根(而不是其他参考帧)。
4.右键单击参考框架并选择![]() 校准参考系。
校准参考系。
该过程与前一节非常相似。主要区别在于我们必须选择虚拟对象的点而不是真实对象的点。
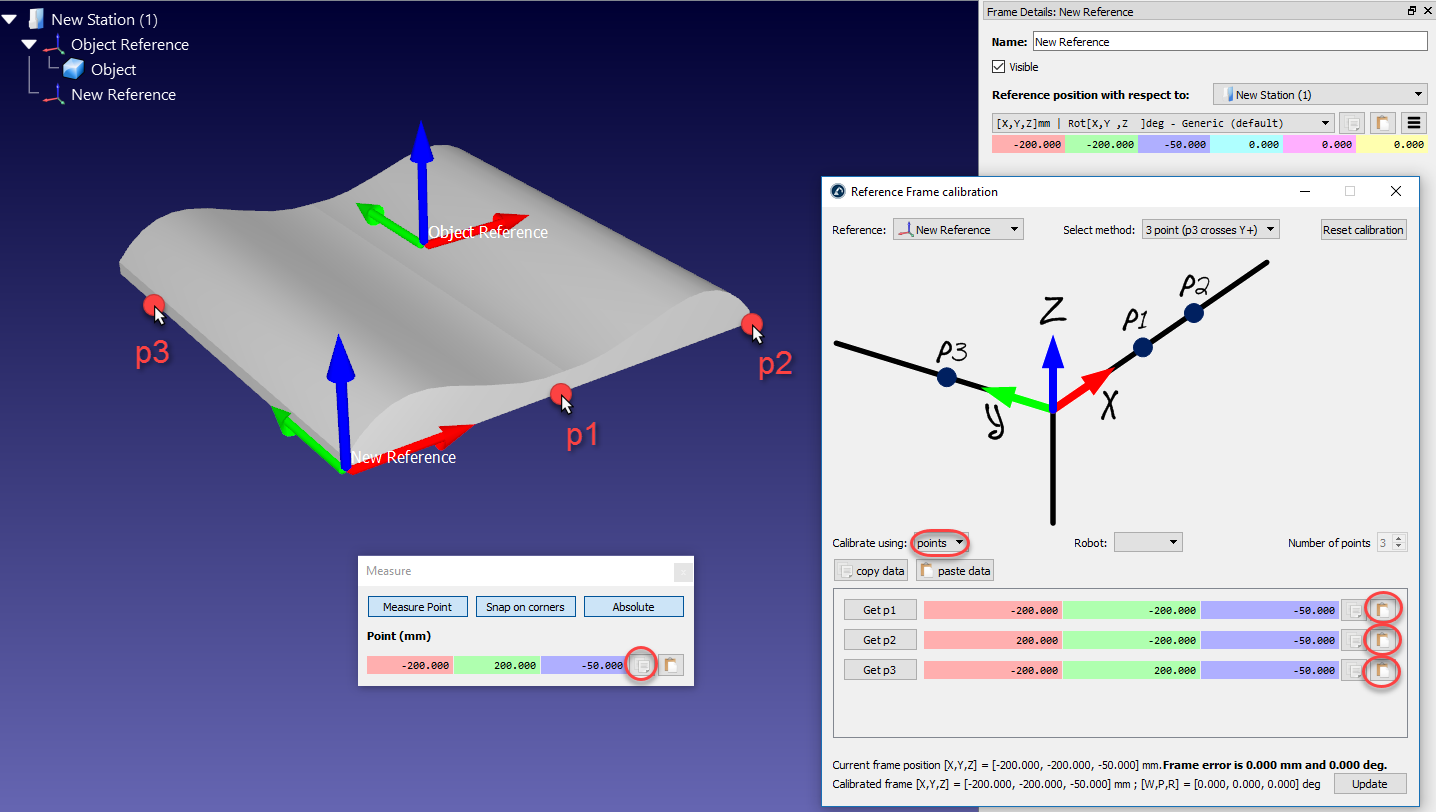
5.选择所需的校准方法。
例如:3点方法(第三个点穿过Y+轴)。
6.选择校正使用点
7.选择工具➔测量打开测量工具
8.选择绝对按钮,使点相对于站点(绝对参考)进行测量。
9.依次选择虚拟物体上的3个点,输入到参考系校准窗口中
10.选择更新.参考系应该出现在期望的位置。
11.右键单击对象并选择改变的支持.然后,选择新的参考系。物体的绝对位置不会改变。然而,物体相对于新参考系的相对位置将被适当地定义。
12.对象及其自身的参考已经为离线编程做好了准备:将新的参考框架拖放到机器人参考框架中。2022世界杯8强赛时间
本节解释如何在共享公共参考框架的情况下对两个或多个机器人进行离线编程。
在典型的离线编程应用程序中2022世界杯8强赛时间,对象的位置相对于机器人更新。然而,当两个或多个机器人用于相同的应用时,每个机器人的位置必须相对于一个共同的参考(一个参考物体或一个共同的参考框架)更新。
按照以下步骤更新两个或多个机器人相对于参照系的位置:
1.确保机器人参照系和物体参照系不相互依赖。如果存在依赖关系,我们应该将参考框架附加到站点项目上。
2.在每个机器人基础框架上添加一个新的参考系,就像你要为每个机器人定义一个新的单独的参考系一样(Real Ref. A和Real Ref. B).
这个参考系将表示零件相对于每个机器人的真实位置。
3.使用标准分别校准这些参考框架(Real Ref. A和Real Ref. B)参考校正程序(以三点法为例)
在这一点上,我们将看到3个参考框架应该是一致的,但它们不是。必须更新每个机器人的参考系来解决这个问题:
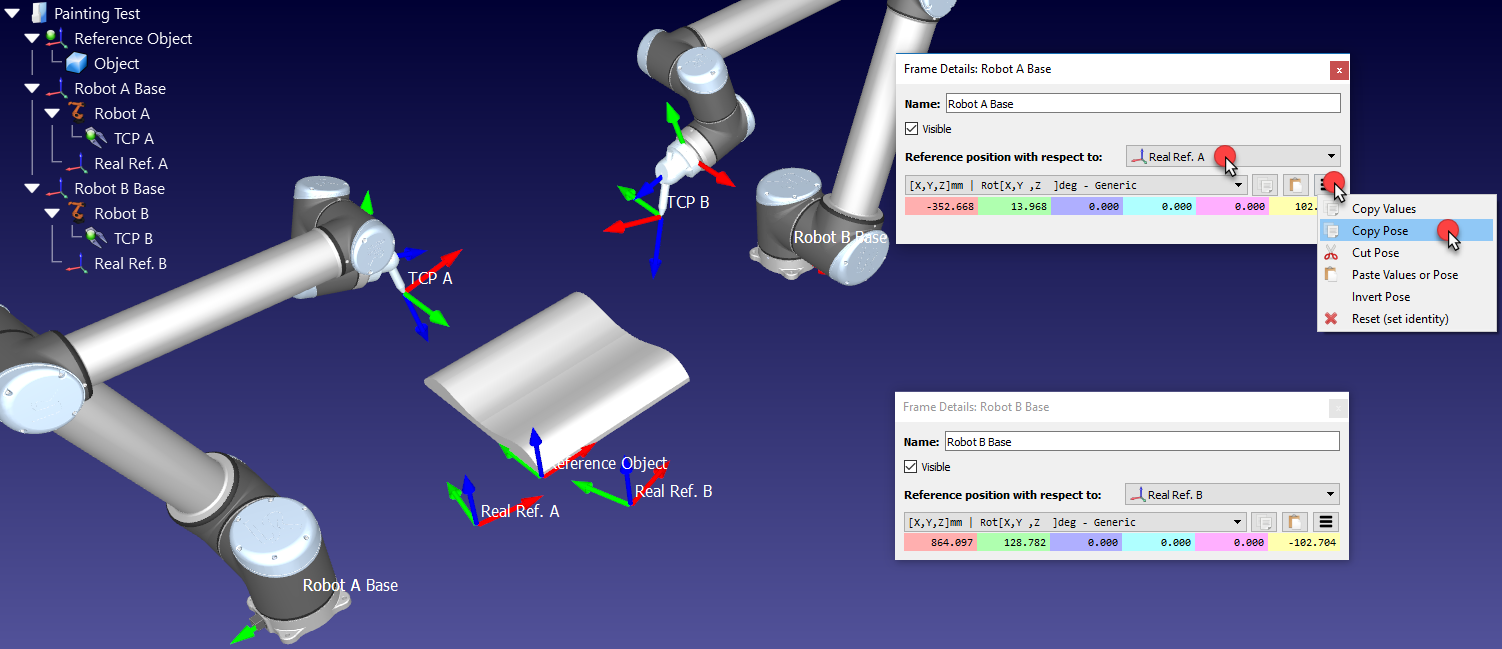
4.双击其中一个机器人引用,例如机器人A基地打开参考框架窗口
5.将机器人基座参考点的位置复制到该机器人的校准参考点(Real Ref. A),选择复制按钮
6.在同一窗口中,更改相对于的参考位置(下拉)到引用对象
7.粘贴复制的位置。机器人会被移动Real Ref. A会不会与引用对象框架
8.对其他机器人(如果有的话)重复上述步骤4-7
在此过程结束时,所有参考帧应匹配,所有校准参考帧与标准帧之间的关系应匹配引用对象应该是一样的。