的参考系定义工具在前一节中描述了两种校准转台相对于机器人的位置的方法。转台的校准/识别可以使用带有适当定义的工具或测量系统(如激光跟踪器)的机器人完成。
当我们移动转盘轴时,我们需要多次检索转盘中一个点的位置。我们目前支持校准1轴和2轴转盘。
重要的是:
正确定义TCP在确定参考系之前(除非您使用从外部测量系统测量的点)。这很重要,因为参考系是用机器人运动学来确定的。这也适用于从机器人教学挂饰中取回点数。刀具校准(TCP)产生的任何误差都将转移到转台位置的识别上。
按照此程序校准1轴转台。
1.选择公用事业公司➔![概览-图15]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![概览-图16]() 定义参考系.
定义参考系.
3.选择方法转台校正(1轴)
![概览-图17]()
4.选择使用校准关节(默认设置)。你可以把它变成点如果你知道每个点相对于机器人基座的XYZ位置。
5.如果工作站上有多个可用机器人,请指定机器人。
6.选择你想要的分数(最低要求是3分)。
重要的是:
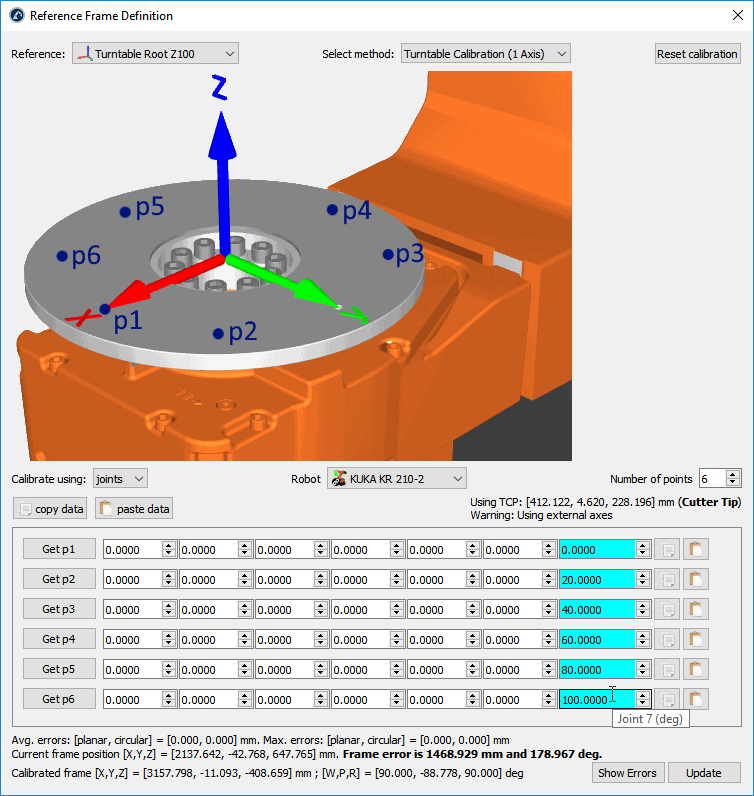
当你移动转盘时,你应该用机器人探测转盘的同一点。转盘需要在旋转的积极意义上移动(如上图所示)。建议使用至少6至10点,以便更好地了解移动转盘所涉及的误差。
重要的是:
第一个点将定义转盘的X轴(静态参考).
重要的是:
标定参考系的XY平面将与圆弧/圆所描述的平面相匹配。如果你没有取平面上的点,你可能需要调整这个偏移量。例如,您可以添加一个嵌套到校准参考系的新参考系,以表示转盘的根。
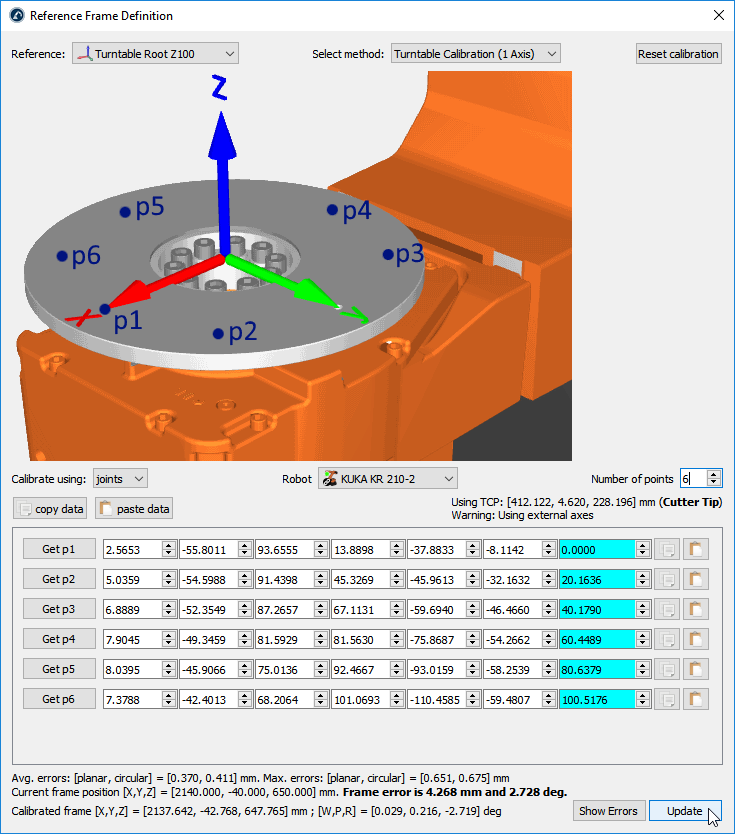
7.开始用机器人关节位置(或点)填充表格。
![概览-图18]()
提示:
配置列表可以手动填写,也可以使用复制/粘贴按钮(关节值右侧的按钮)填写。
提示:
如果您已连接到机器人,您可以选择“得到p按钮,直接从机器人上取回机器人关节。中提供了设置它的更多信息机器人司机部分。此选项并非适用于所有机器人,可能需要机器人制造商出售的其他软件选项。
重要的是:
如果手动输入值,建议为每个关节值提供至少4个小数(在提供关节值时)。允许的十进制值的数量可以在工具中更改➔选项➔精度➔马克斯小数。
注意:
一旦您选择更新,RoboDK将在RDK站保留所提供数据的副本。
8.最后,选择更新将新位置应用于RoboDK站中选定的参考系。
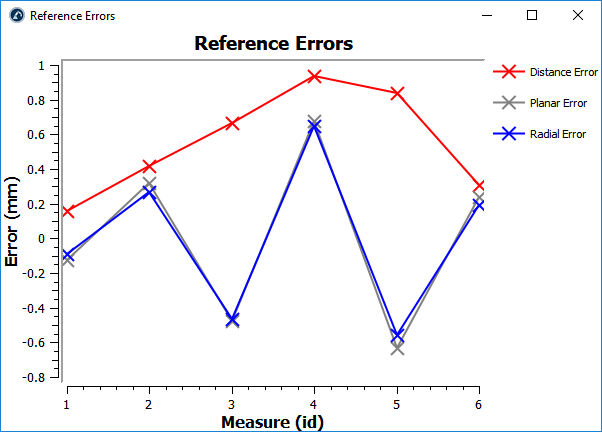
9.选择“显示误差”,显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)
![概览-图19]()
按照这个程序校准一个2轴转盘。
1.选择公用事业公司➔![概览-图20]() 定义参考
定义参考
2.选择要定义/校准的参考系。
或者,右键单击参考框架并选择![概览-图21]() 定义参考系.
定义参考系.
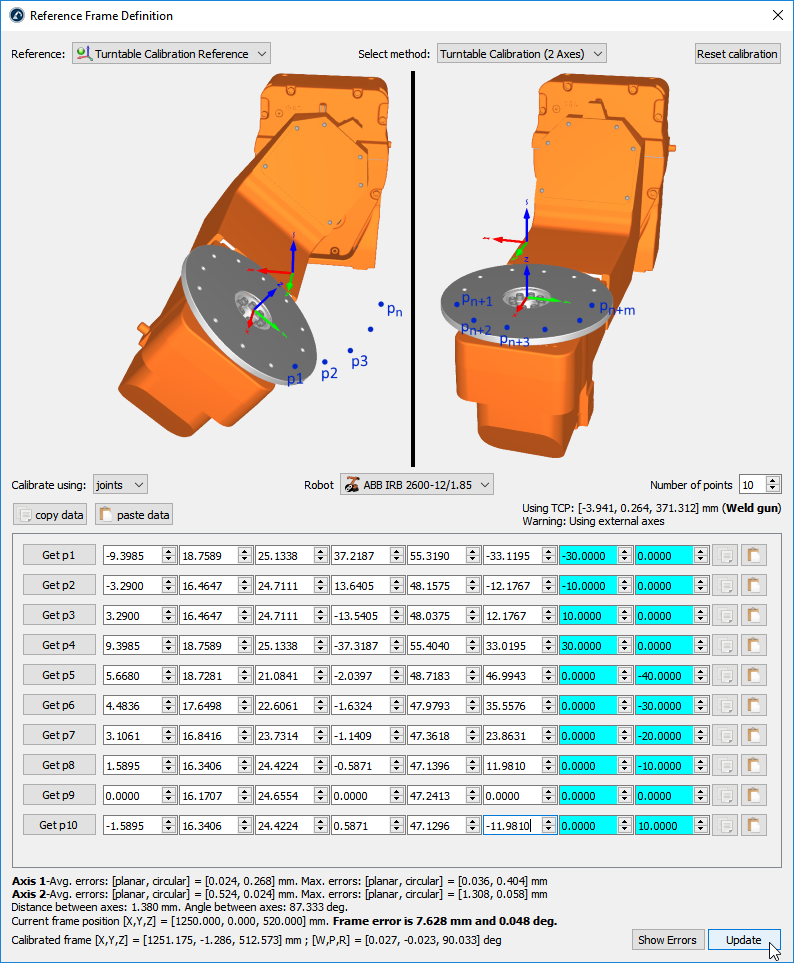
3.选择方法转台校正(二轴)
![概览-图22]()
4.选择使用校准关节(默认设置)。你可以把它改为点(而不是关节),如果你有每个点相对于机器人基础框架的XYZ位置。
5.如果工作站上有多个可用机器人,请指定机器人。
6.选择你想要的分数(最低要求是6分:每个轴3分)。
重要的是:
当你移动转盘时,你应该用机器人探测转盘的同一点。转盘需要在每个轴的积极旋转意义上移动。您应该首先移动轴1,然后移动轴2(如上图所示)。建议使用至少12至20点,以便更好地了解移动转盘所涉及的误差。
注意:
用于标识轴1的点数不需要与用于标识轴2的点数相匹配(例如,您可以使用4个点来标识轴1,使用6个点来标识轴2)。
重要的是:
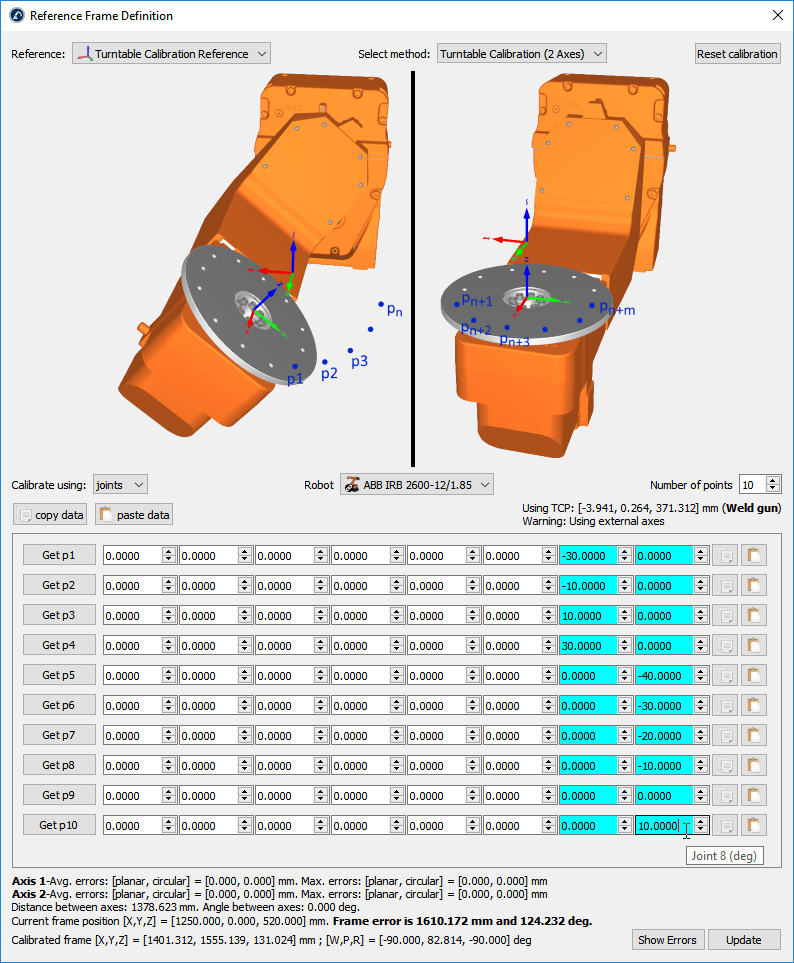
校准基准的Z轴将匹配轴2。校准基准的X轴将与公法线匹配。此外,校准基准的原点将放置在轴2和公法线(轴2上最接近轴1的点)之间的交点上。
7.开始用机器人关节位置(或点)填充表格。
![概况-图23]()
提示:
配置列表可以手动填写,也可以使用复制/粘贴按钮(关节值右侧的按钮)填写。
提示:
如果您已连接到机器人,您可以选择“得到p按钮,直接从机器人上取回机器人关节。中提供了设置它的更多信息机器人司机部分。此选项并非适用于所有机器人,可能需要机器人制造商出售的其他软件选项。
重要的是:
如果手动输入值,建议为每个关节值提供至少4个小数(在提供关节值时)。允许的十进制值的数量可以在工具中更改➔选项➔精度➔马克斯小数。
注意:
一旦您选择更新,RoboDK将在RDK站保留所提供数据的副本。
8.最后,选择更新将新位置应用于RoboDK站中选定的参考系。
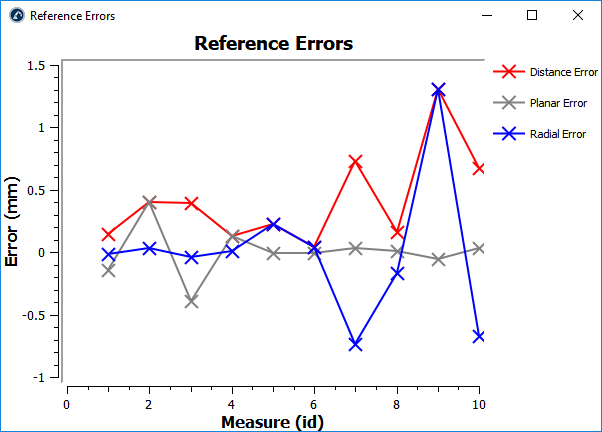
9.选择“显示误差”,显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)
![概览-图24]()