去毛刺
机器人塑料去毛刺是由一个机械臂从塑料成型部件上去除多余的材料。这个例子将帮助您在RoboDK中创建一个用于机器人仿真和离线编程的项目。2022世界杯8强赛时间这个例子还展示了如何使用Fusion 360插件在RoboDK中生成工具路径。
使用Fusion 360的RoboDK插件,您可以轻松地创建一个加工项目,并在RoboDK内部自动导出生成的路径。然后RoboDK将把它转换成一个机器人程序。您可以轻松地将SolidWorks中创建的3D模型加载到RoboDK。RoboDK插件允许您直接从Fusion 360为任何制造应用程序编程任何机械臂。
要启动项目,您首先必须从默认库中选择RoboDK的塑料去毛刺示例。
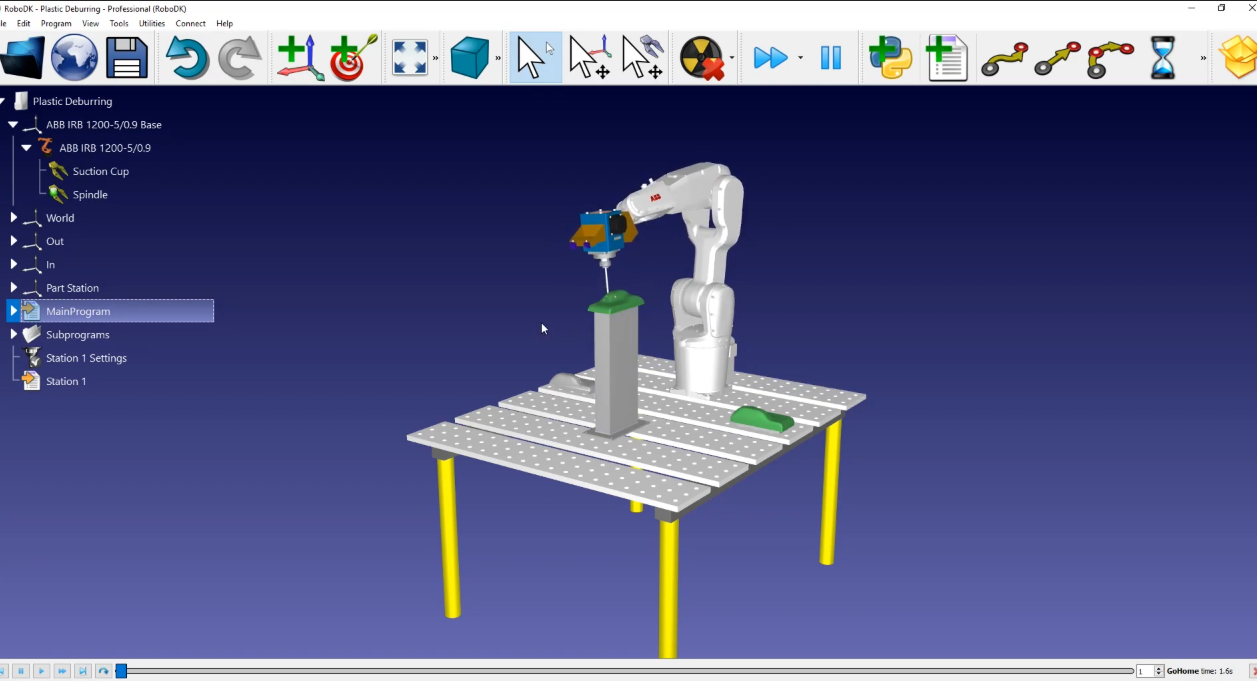
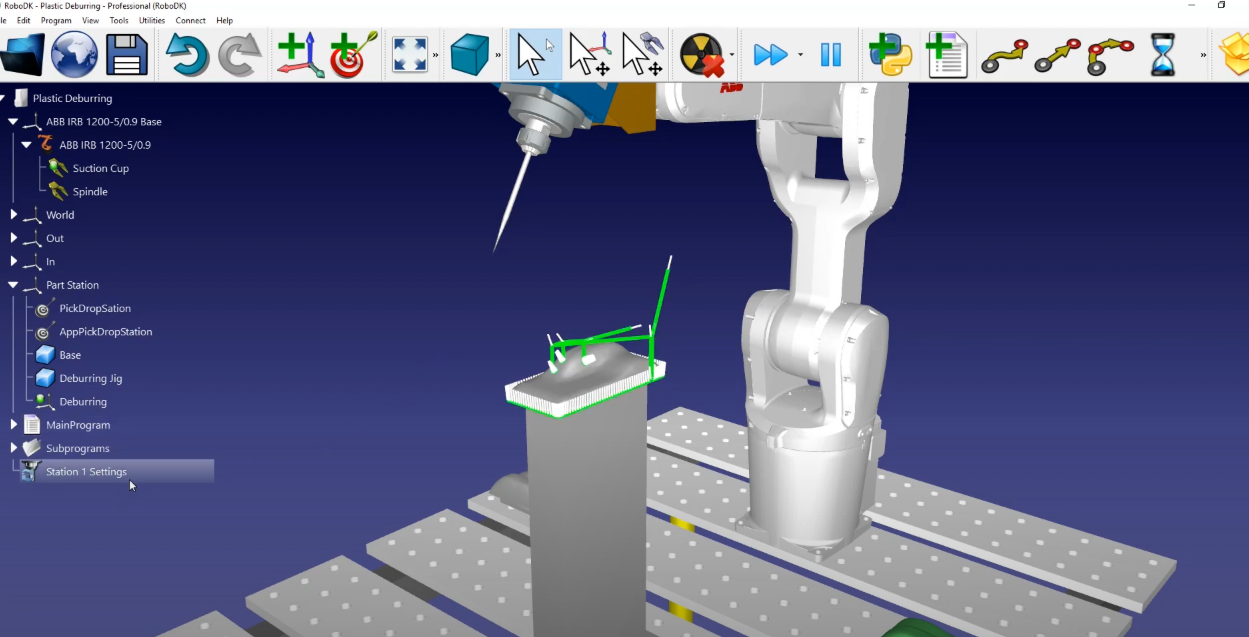
这个例子使用了一个简单的设置:一个机器人安装在桌子上(这个例子包括ABB机器人),一堆刚成型的零件,一堆已加工的零件,中间的夹具将零件固定在适当的位置。
装站:
1.选择文件➔![]() 开放
开放
2.定位塑料去毛刺的例子从RoboDK的例子部分:
C: / / RoboDK /例子Plugin-Fusion360-Plastic-Deburring.rdk。
现在你已经加载了站,你可以打开融合360。
在融合360中打开你的目标。在这个例子中,对象是一个塑料部件。这个项目的目标是去除多余的材料在三个孔,并在它的底部附近的所有部分。
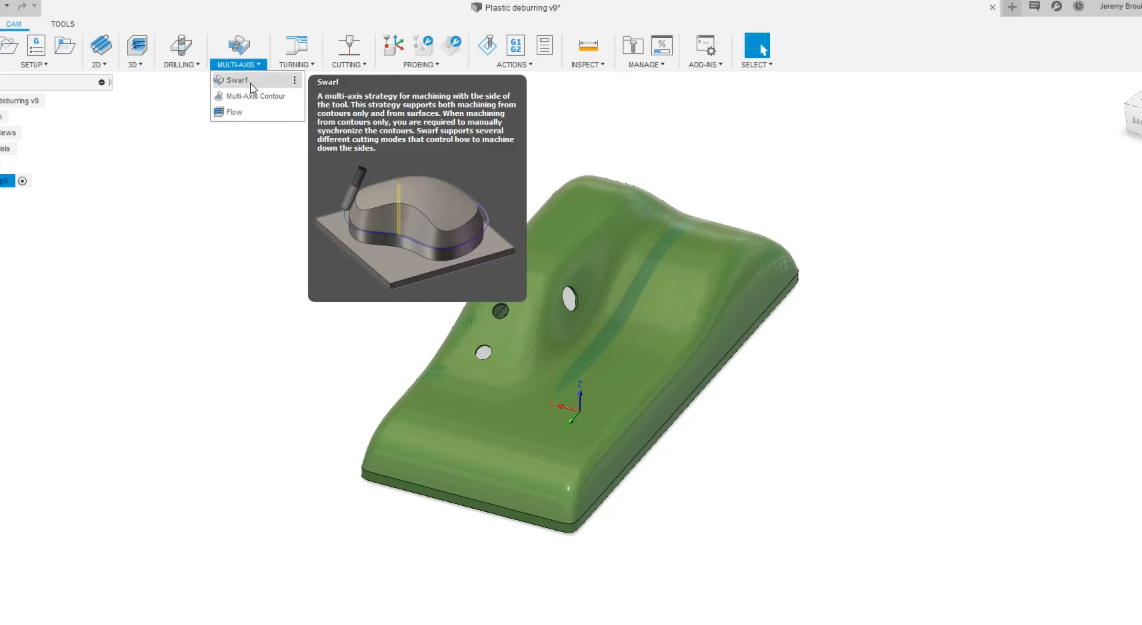
首先,您需要确保处于Fusion的“Manufacturing”工作区选项卡中。我们应该遵循以下步骤来创建工具路径:
1.选择多轴然后选择木屑工具。
2.选择您想要使用的工具(在本例中,我们将使用RoboDK站的自定义工具),然后选择孔来创建第一条路径。
3.为了在表面的右侧获得刀具路径,我们将选择机器另一侧然后选择好吧.每个孔都按照这个步骤进行。
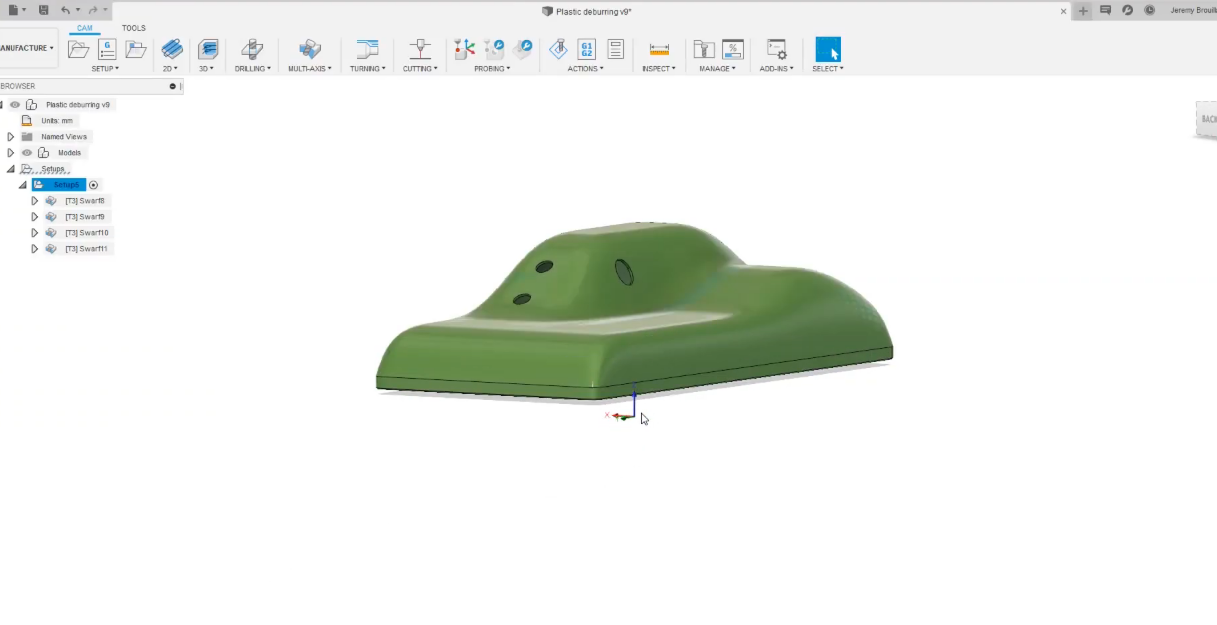
4.要对底部执行相同的操作,您将选择木屑工具,然后选择底部。
5.一旦计算完成,我们将模拟我们刚刚创建的路径:选择您的设置然后选择模拟.
你将有一个完整的工具路径为您的机器人。我们需要回到RoboDK,以确保“去毛刺”参考系被激活。为此,我们必须:
进入RoboDK:选择去毛刺然后选择激活参考系.
现在去毛刺参考系已激活,程序将根据该参考系导出。e将返回到Fusion 360并验证图像如下所示:
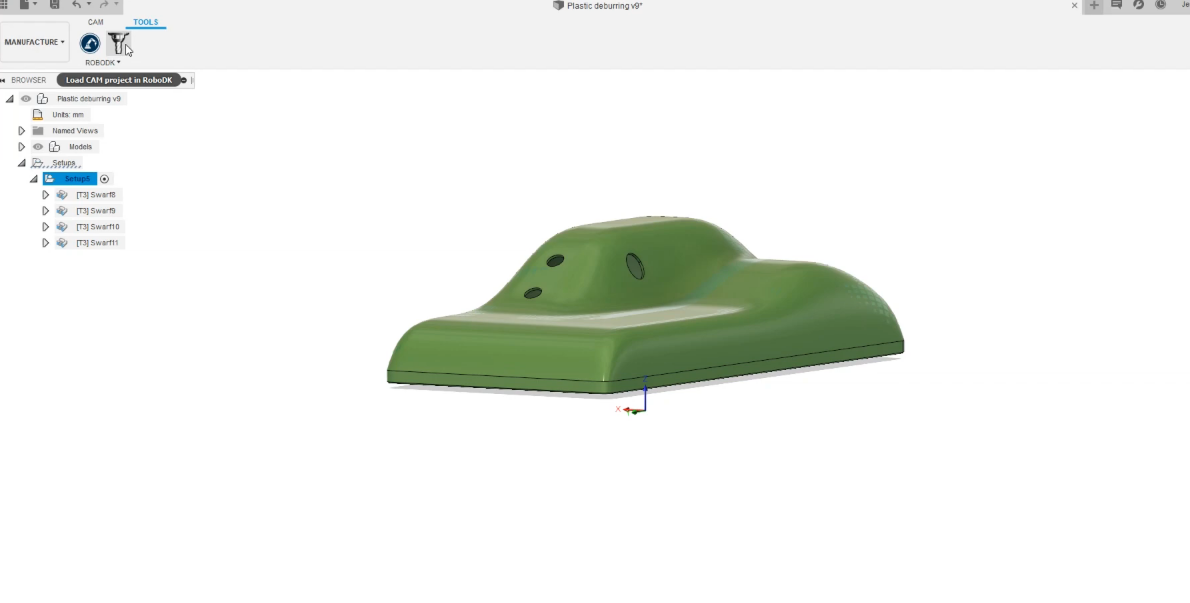
按照以下步骤将你的草图加载到RoboDK:
1.在Fusion 360中,你有RoboDK插件。简单的选择在RoboDK中加载CAM项目
2.如果我们回到RoboDK,我们可以在它的位置找到切割路径。一个“加工项目”称为“塑料去毛刺”创建:选择去毛刺然后选择可见.
3.我们可以将切割路径重命名为“Station1 Settings”:右键单击在塑料去毛刺重命名。
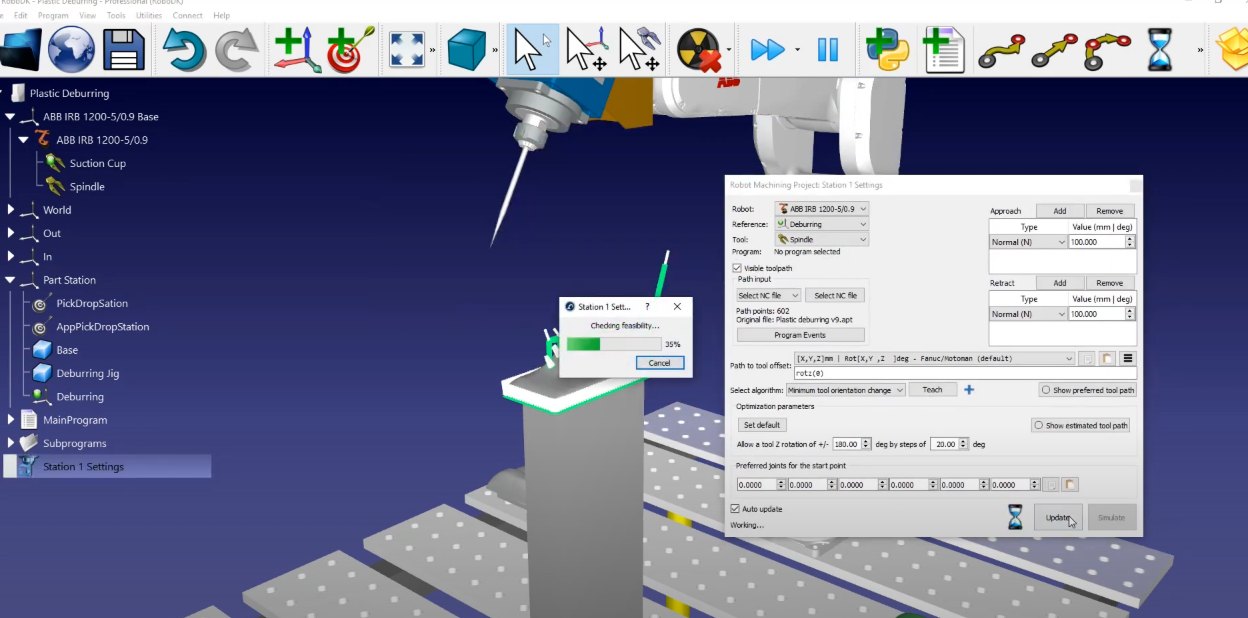
一旦我们在RoboDK中准备好了机器人的工具路径,我们应该确保虚拟机器人单元与真实设置相匹配。在RoboDK中,我们确保在生成机器人程序之前使用正确的工具和参考框架进行制造操作。
在本例中,我们选择了引用去毛刺工具是主轴.选择更新➔模拟.
如果你想重新排序或切换路径部分的意义,请遵循以下步骤:
1.CAM项目通常已经有了它们的接近和收回动作,所以我们可以删除我们的:简单地转到“接近”和“收回”并选择删除.选择更新然后模拟.
2.在本例中,默认参数产生有效的结果。我们想要更改的唯一附加设置是激活和禁用主轴:Open项目活动➔在“路径接近”和“路径收回”中添加子程序检查每个选项和写“主轴(1)”在路径方法和“主轴(0)”在路径撤回。这假设您在控制器中定义了一个函数,该函数可以接受一个参数来激活或禁用主轴。
3.选择更新.
现在我们必须修改我们创建的程序的名称“Station 1”并启动“Main program”
我们需要做的最后一件事是生成机器人程序。由于我们使用的是ABB机器人,因此需要导出一个使用ABB专有RAPID编程语言的ABB机器人控制器的mod文件。
1.确保我们使用正确的后处理器:选择站➔选择后处理器➔Abb快速irc 5。
2.右键单击Station1程序并选择生成机器人程序.
您应该在文本编辑器中自动看到机器人程序。您将能够看到ABB机器人控制器所需的所有特定移动命令和语法。