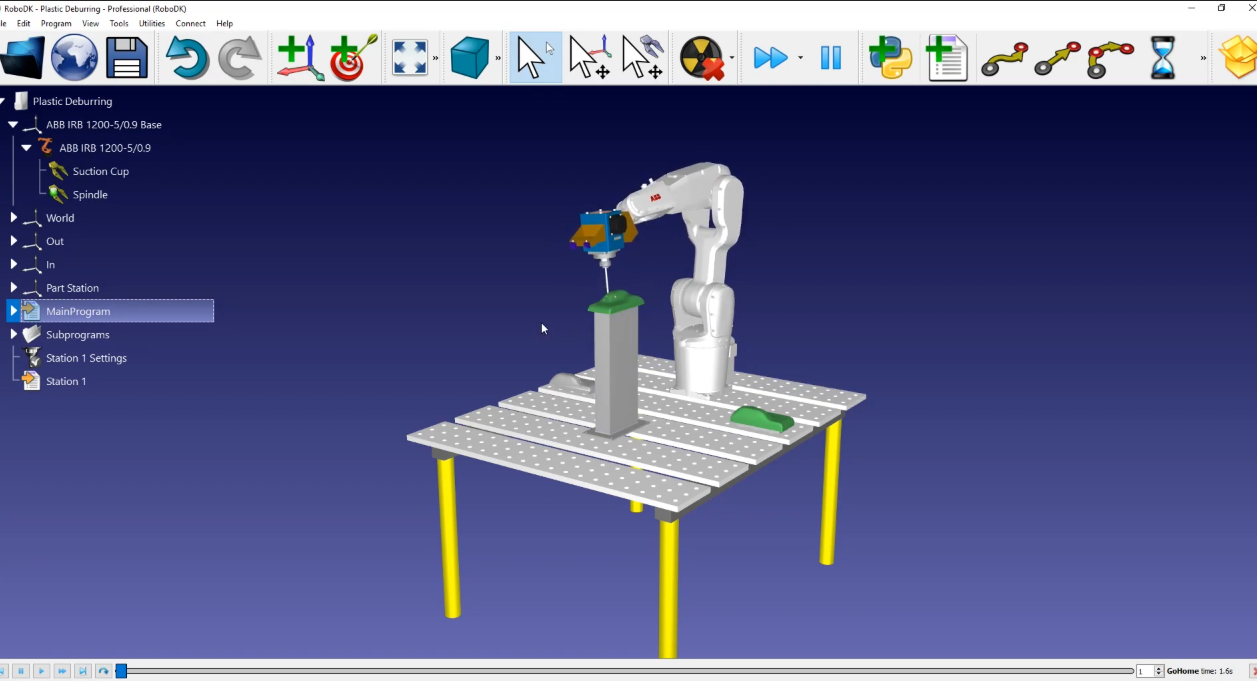
这个例子使用了一个简单的设置:一个安装在桌子上的机器人(这个例子包括一个ABB机器人),一个桩用于新成型的零件,一个桩用于加工的零件,中间的夹具用于固定零件。
装车:
1.选择文件➔开放
2.定位塑料去毛刺的例子从RoboDK的示例部分:C: / / RoboDK /例子Plugin-Fusion360-Plastic-Deburring.rdk。
现在你已经加载了站点,你可以打开Fusion 360。