激光切割
本节将帮助您在RoboDK中创建一个用于机器人仿真和离线编程的基本项目。2022世界杯8强赛时间在本例中,使用Fusion 360和RoboDK对Motoman机器人进行了模拟和编程,用于激光切割应用。
您可以在两种不同的方法之间进行选择:一种使用特征提取方法,一种使用Fusion 360的激光切割功能。
使用Fusion 360的RoboDK插件,您可以轻松地将在Fusion 360中创建的3D模型加载到RoboDK。这个插件允许您直接从Autodesk Fusion 360编程50多个不同的机器人制造商和500个机器人。
如果您拥有RoboDK许可证,Fusion 360的RoboDK插件是免费的。
要启动项目,首先必须在默认库中选择RoboDK的激光切割示例。
这个例子使用Motoman MH50-35机器人,一个激光切割头,一块冲压金属和一个激光切割台。
装站:
1.选择文件➔![]() 开放
开放
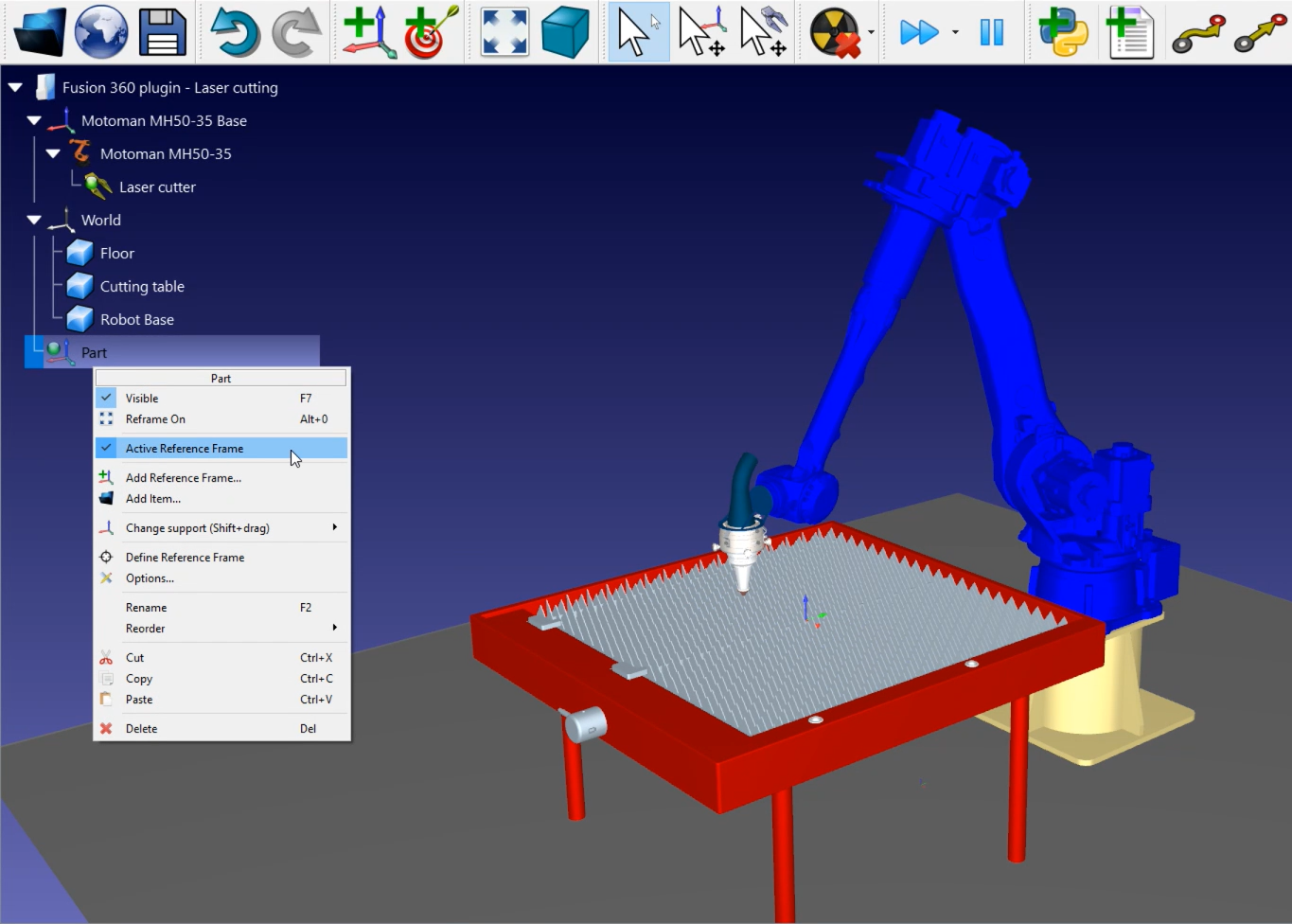
2.定位切割机的例子RoboDK的例子部分:
C: / / RoboDK /例子插件-融合- 360激光cutting.rdk。
注意![]() 表中间的一个名为“Part”的参考系是将要导入的部件。确保这个参考框架是通过右击激活的
表中间的一个名为“Part”的参考系是将要导入的部件。确保这个参考框架是通过右击激活的![]() 参考系➔主动参考系.
参考系➔主动参考系.
现在你已经加载了站,你可以打开融合360。
在Fusion 360中打开3D对象。在这个例子中,3D对象是一块冲压金属。
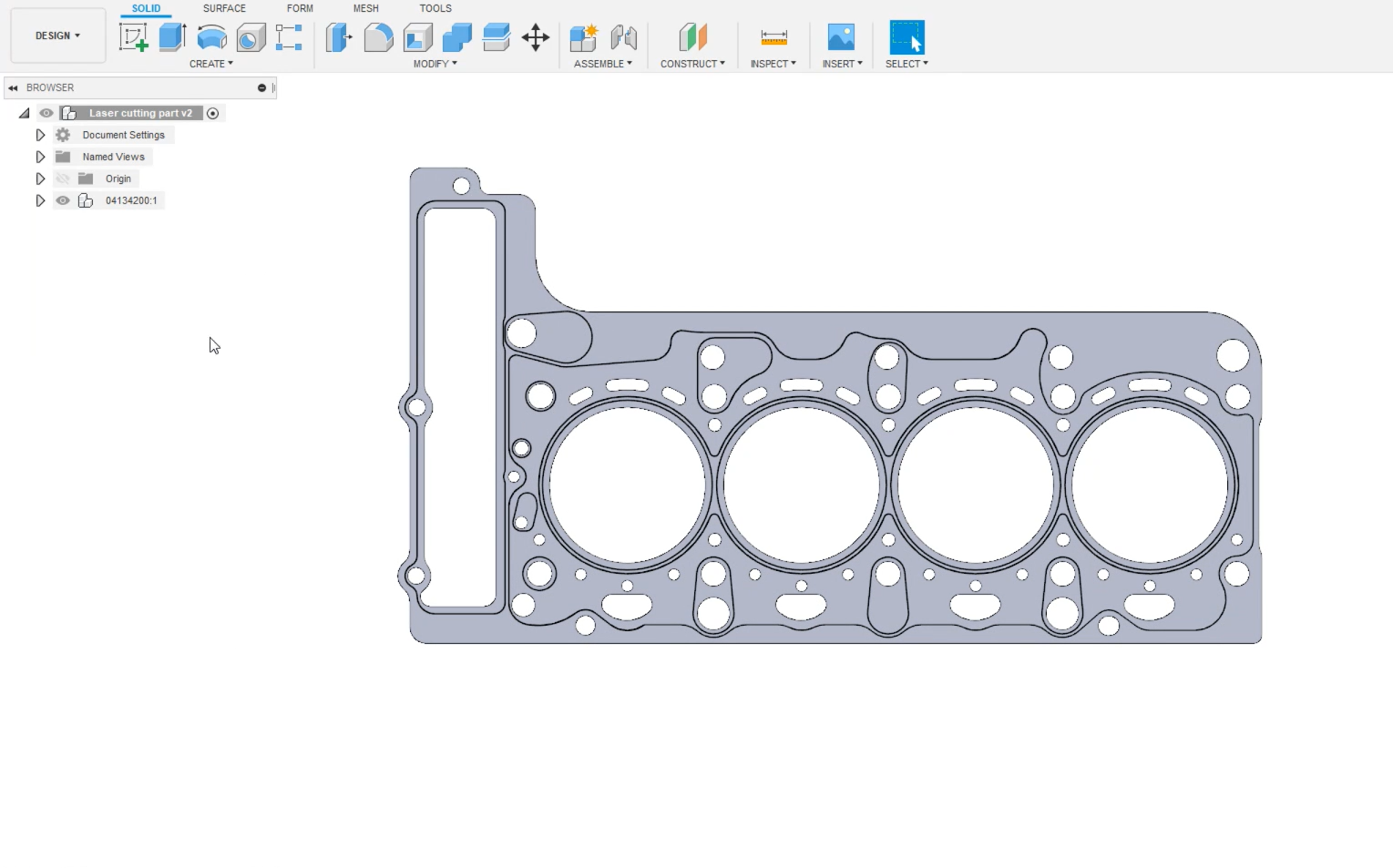
这个项目的目标是自动创建一个机器人程序,它将用激光切割机切割所有这些孔。手工编程太费时了。
1.选择设计在左上角的Fusion部分。
2.选择工具选项卡。这是你可以找到RoboDK插件的地方。
3.点击按钮![]() 将零件加载到RoboDK。
将零件加载到RoboDK。
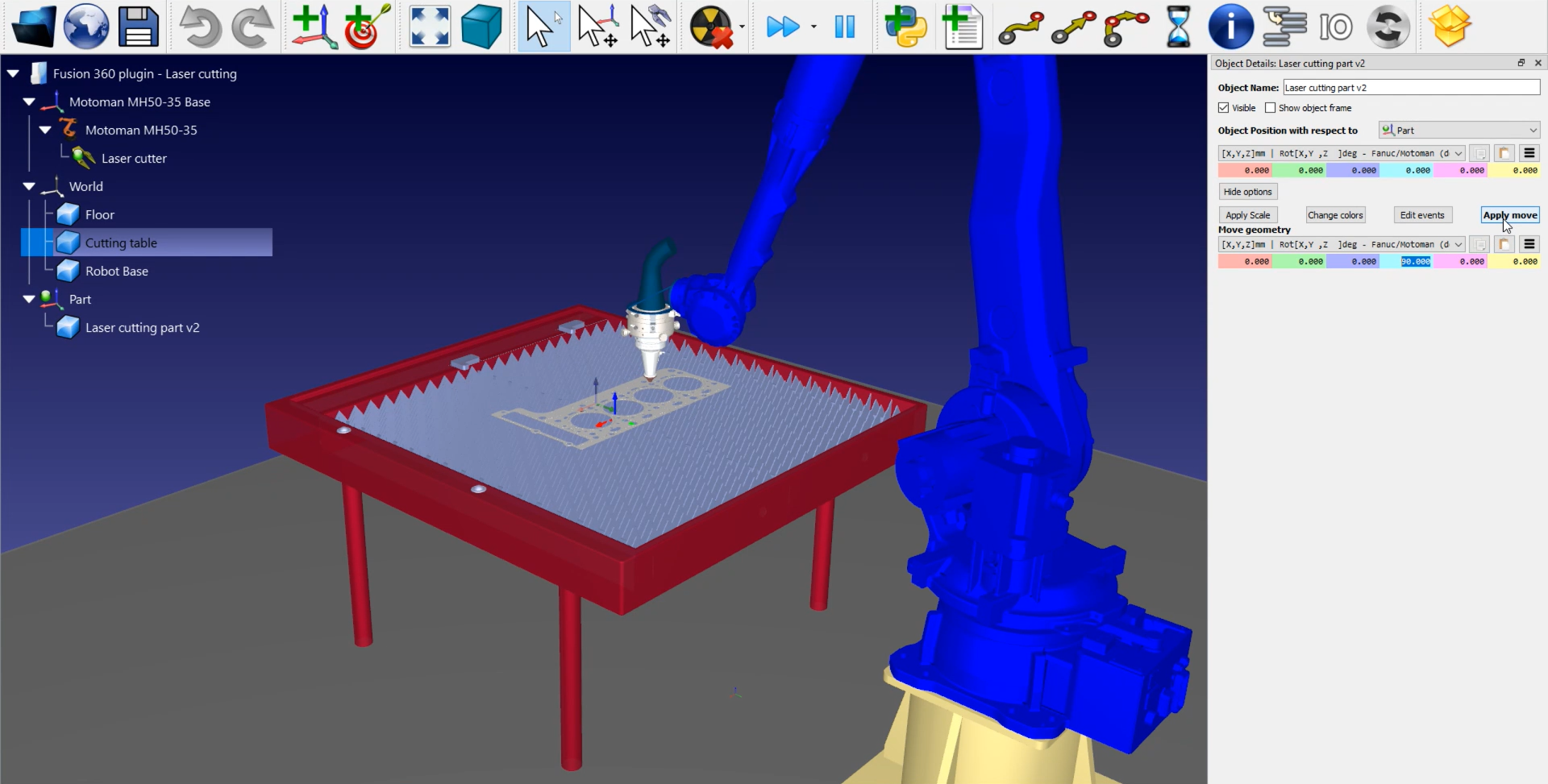
该部件已导入到RoboDK站的活动参考系中。确保部件导入方向正确。在本例中,您必须修改部件的方向。
按照以下步骤修改部件的方向:
1.双击![]() 激光切割部分.在本例中,该部件称为激光切割部件v2。
激光切割部分.在本例中,该部件称为激光切割部件v2。
2.点击更多的选择打开菜单。
3.去将几何并在X轴(浅蓝色)输入90,如图所示。
4.点击应用移动保存方向。
RoboDK插件在Fusion 360中还有另一个功能,可以帮助您将切割路径导入RoboDK。
1.回到融合360。
2.在RoboDK插件菜单中,选择负载曲线(s).
3.选择曲线打开菜单。
4.选择如下图所示的四个大圆圈的边缘。
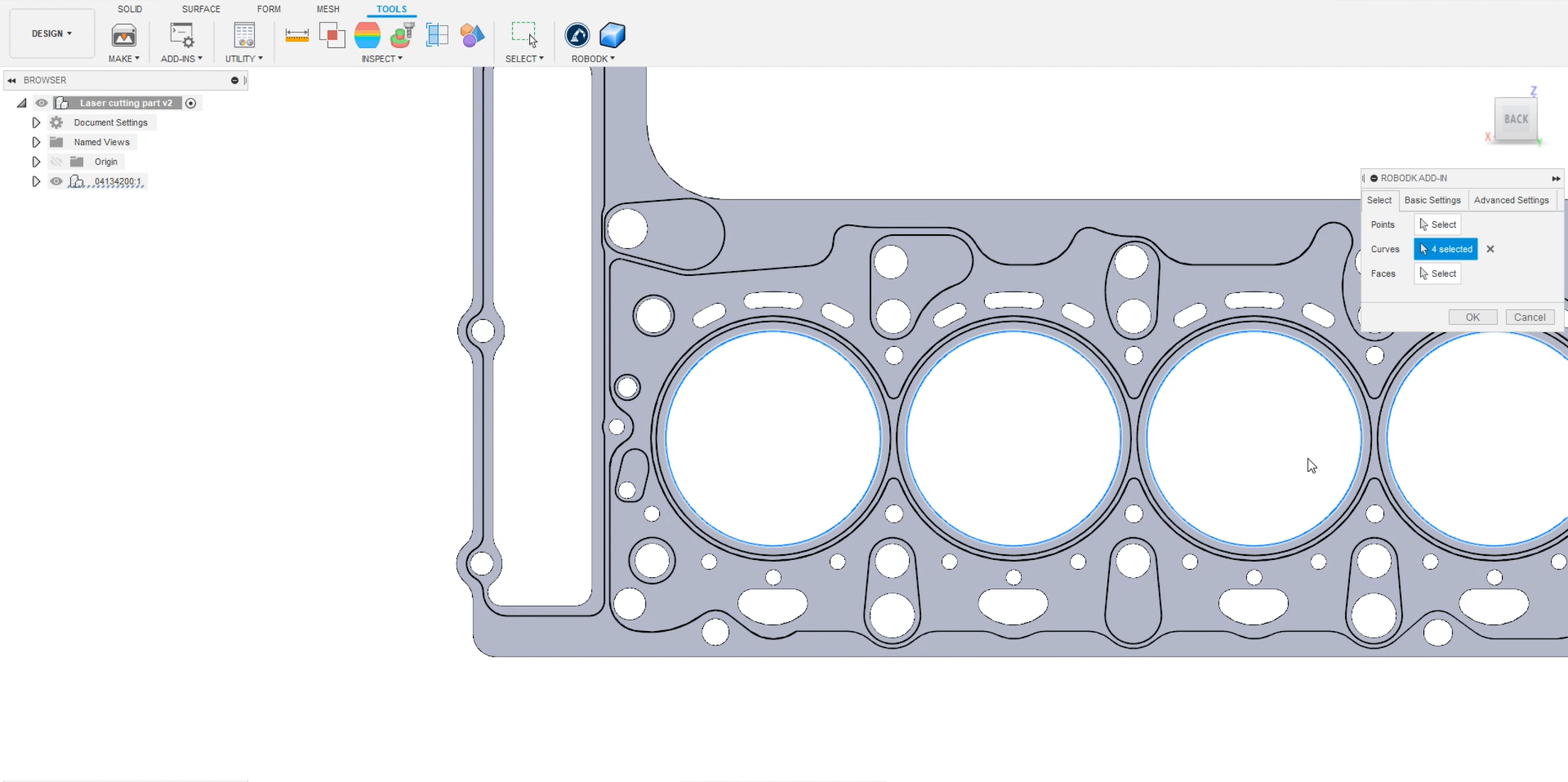
现在你需要给RoboDK一个机器人工具的方向。
1.选择脸打开菜单。
2.选择你希望工具法线的面,如下图所示。
现在您可以配置设置:
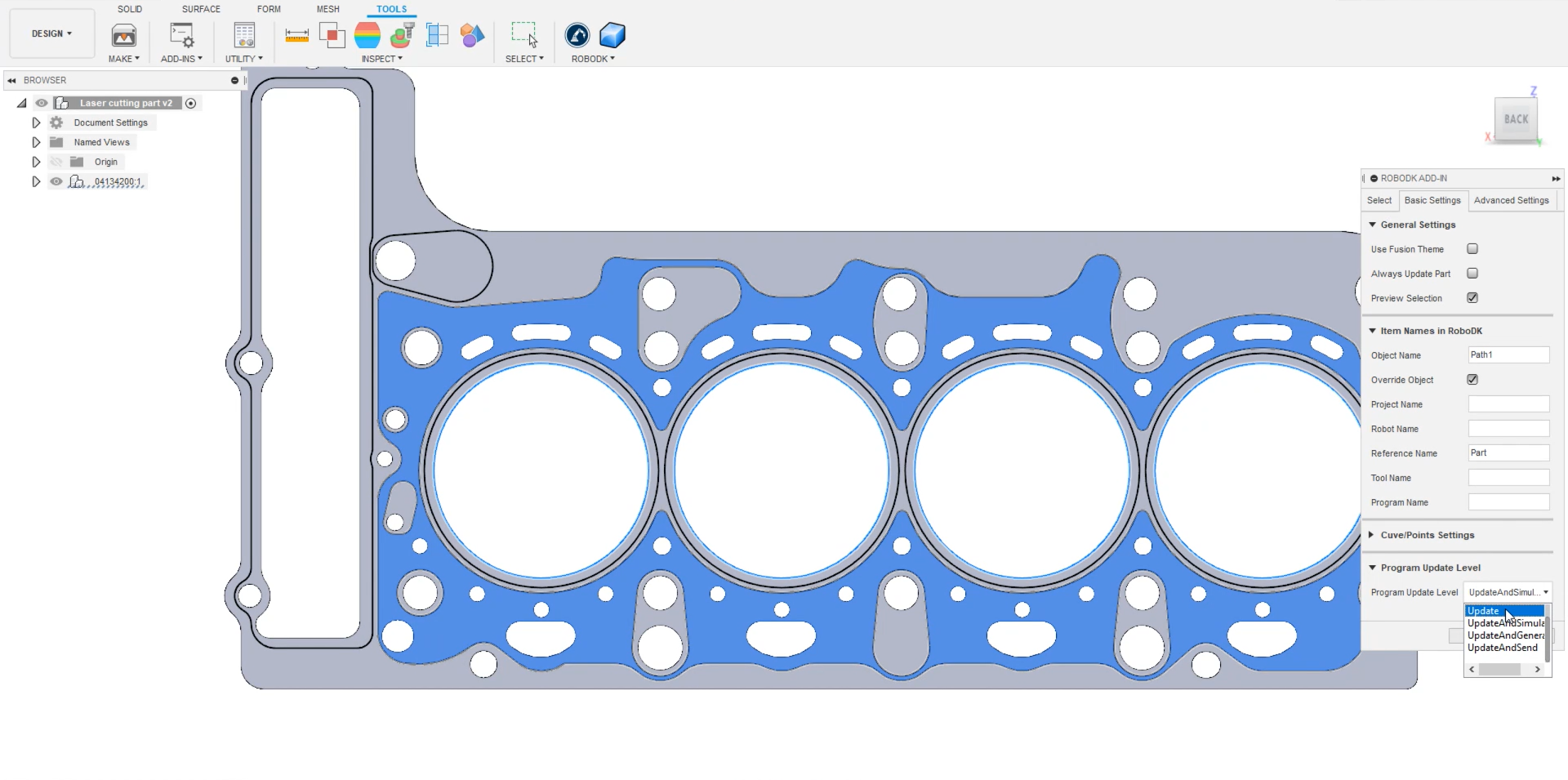
1.在同一菜单下,转到基本设置.
2.取消的使用融合主题如果你想保持RoboDK的默认行为。
3.输入一个对象名称命名你的路径。在本例中,它将是路径1。
4.输入一个引用名称你想把它导出。在本例中,它被命名为Part,与RoboDK站中的名称相同。
5.选择更新在程序更新级别中有更多的选项,如上图所示。这是可选的。
6.点击好吧.
您现在应该能够在RoboDK中看到导入的路径。在这个例子中,方向又错了,你需要修改方向,就像你之前对零件做的那样。
1.双击您的路径,在本例中为![]() 路径1.
路径1.
2.点击更多的选择打开菜单。
3.去将几何在X轴上输入90(浅蓝色)。
4.点击应用移动保存方向。
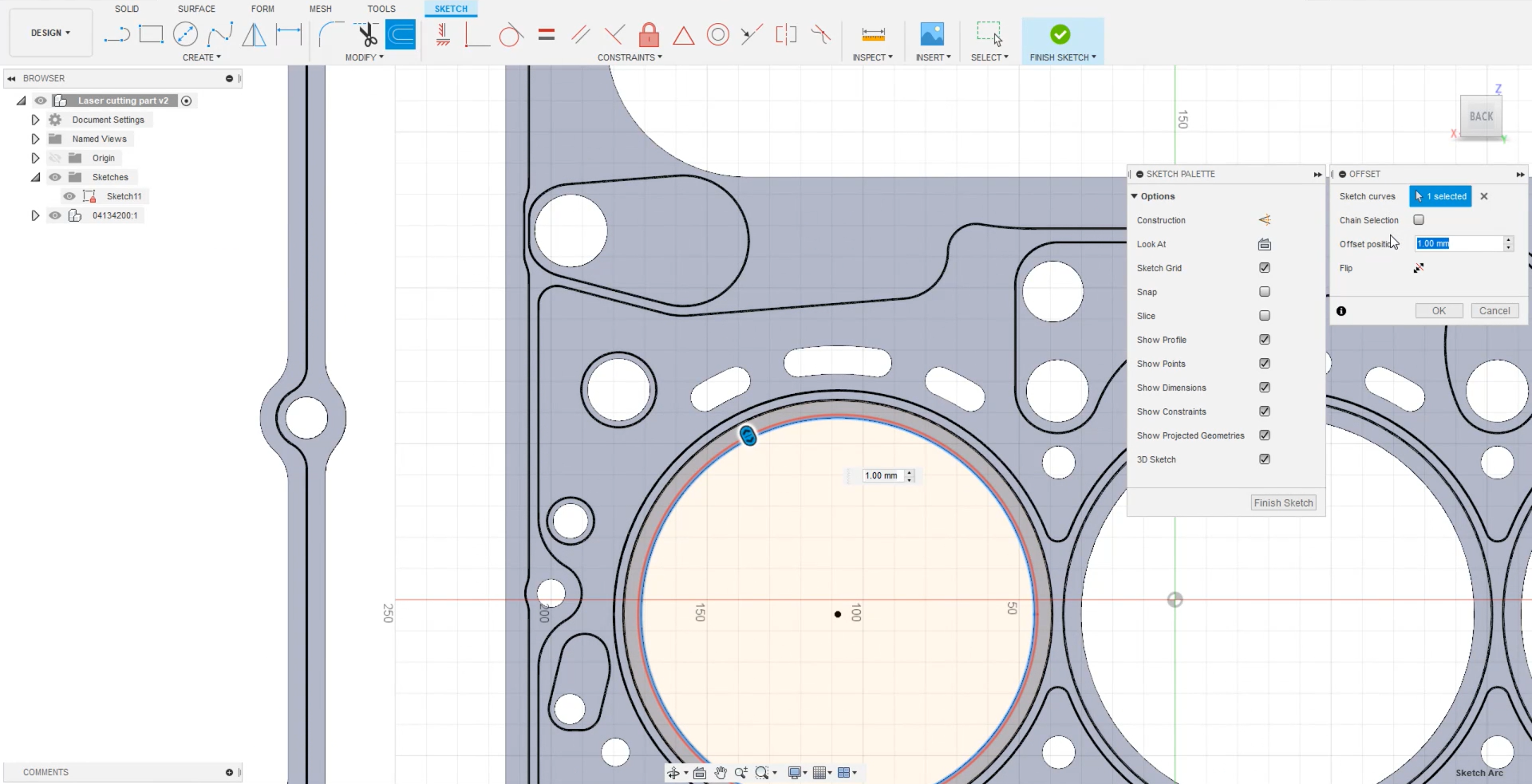
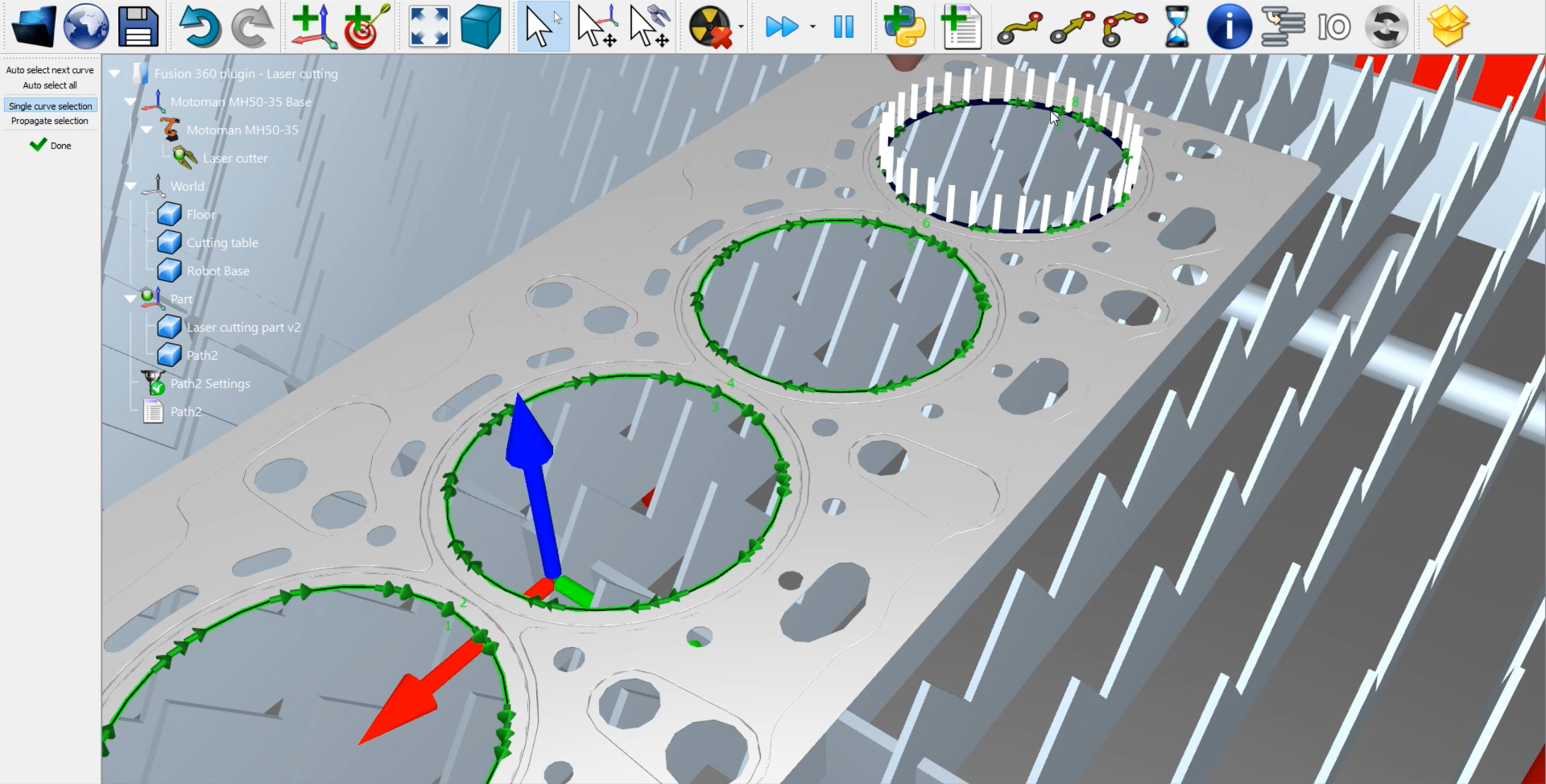
下一步是通过选择来验证执行路径部分的顺序是否正确![]() Path1设置➔更新➔模拟.在这个例子中,四个圆中只有一个被选中,如下图所示。
Path1设置➔更新➔模拟.在这个例子中,四个圆中只有一个被选中,如下图所示。
1.双击路径设置,在这里![]() Path1设置.
Path1设置.
2.确保机器人、参考和工具都是正确的。
3.点击选择曲线.
4.选择其他的圆。
5.点击![]() 完成.
完成.
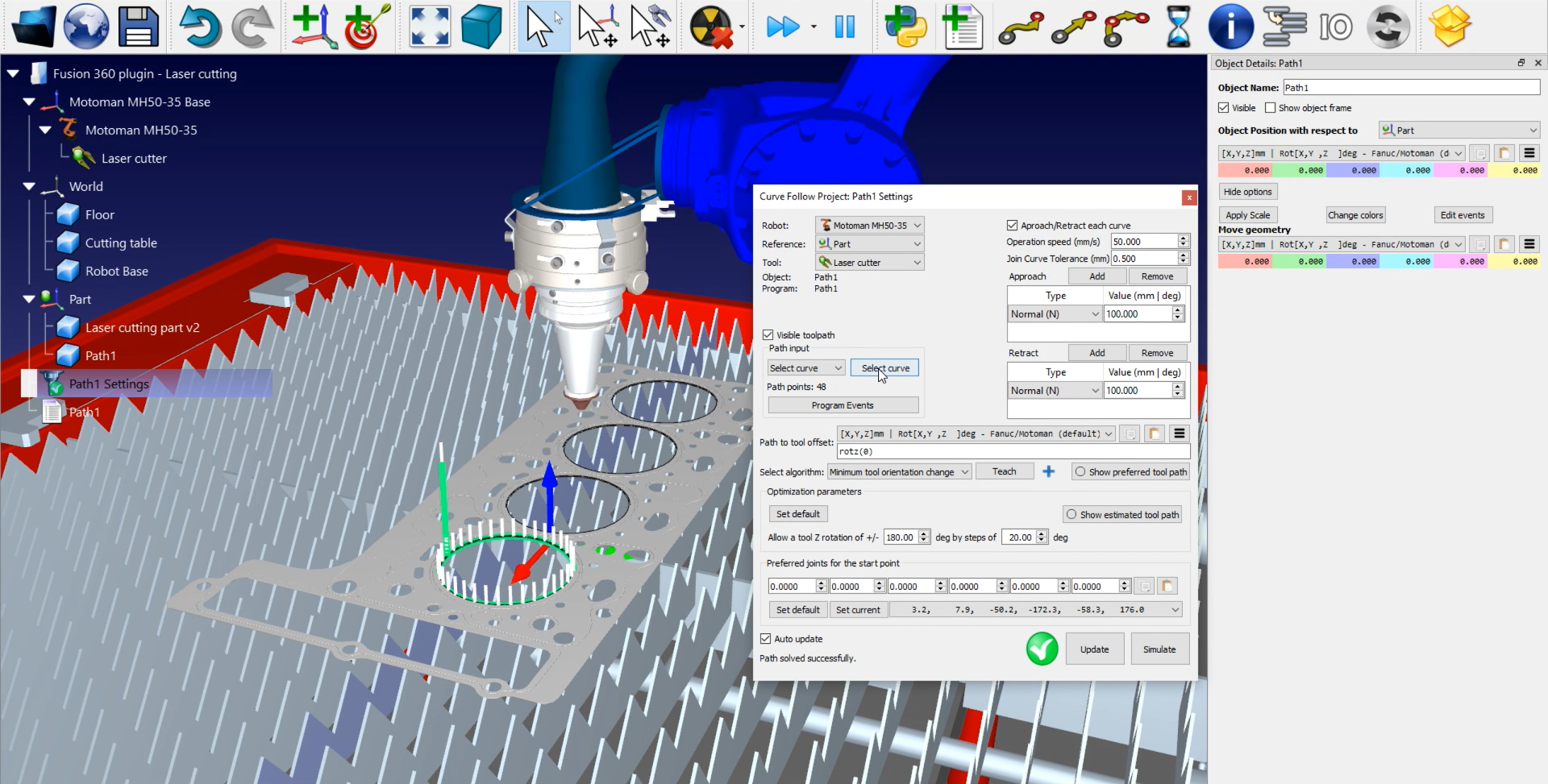
你现在可以注意到,在长度方面,接近和收回的动作有点太长了。
您可以通过以下方式轻松修改这些值:
1.双击路径设置,在这里![]() Path1设置.
Path1设置.
2.中输入较小的值方法而且收回盒子。本例中输入25mm。
3.点击更新➔模拟.
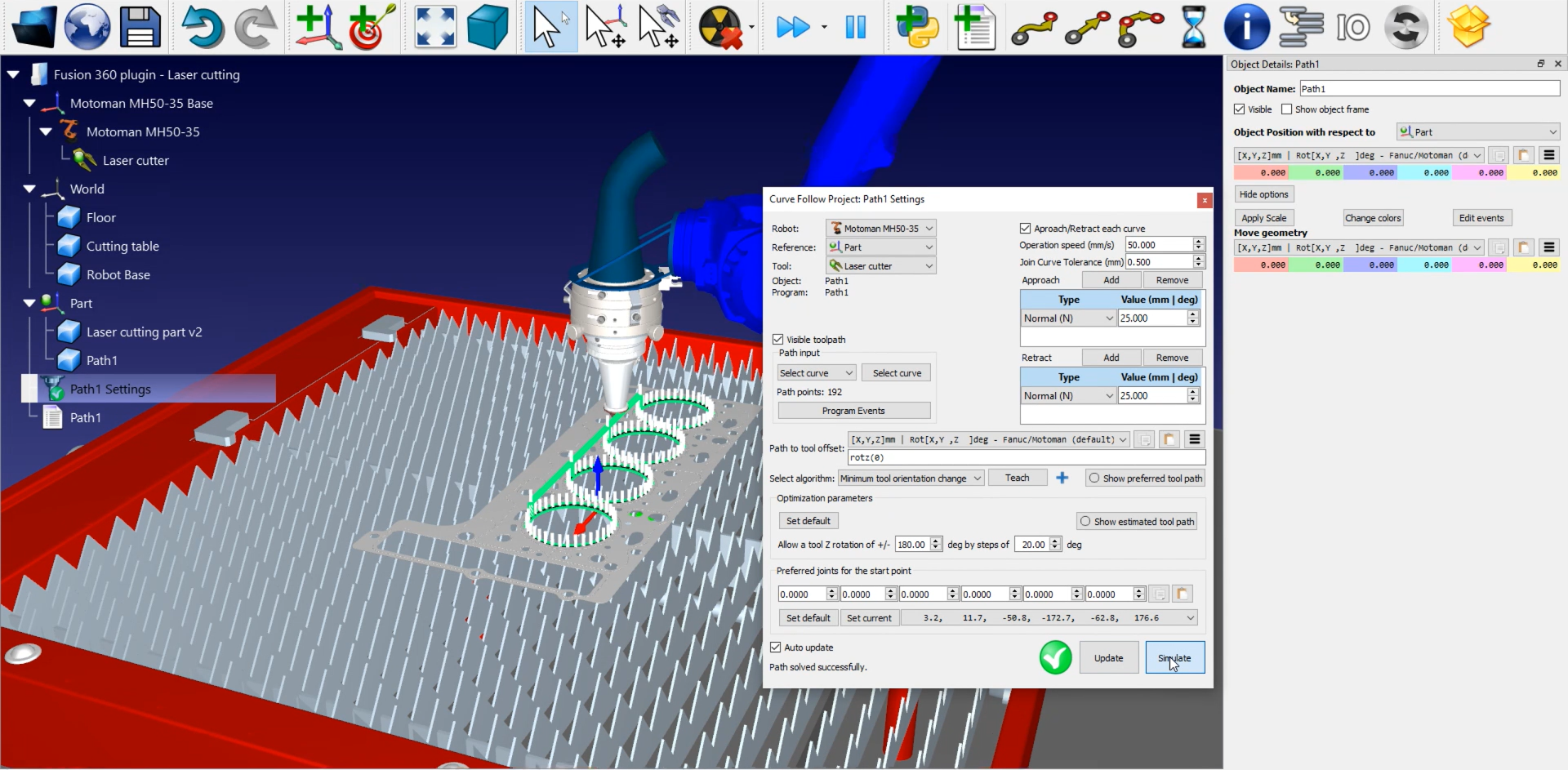
下一步是考虑激光的半径。在这个例子中,激光切割了太多的材料。
如何设置激光半径:
1.回到融合360。
2.开始付账固体➔创建草图来创建你的草图。
3.选择一个圆,然后单击抵消在顶部菜单中创建一个新路径。
4.考虑到激光束的直径为2mm,半径为1mm。在偏移位置框如下图所示。
5.对其他3个圆重复上述步骤。
6.点击好吧.
现在可以将曲线加载到RoboDK中。
1.去工具选项卡。
2.点击RoboDK➔负载曲线(s).
3.选择曲线然后点击每个圆圈里的草图。
4.选择脸然后点击你希望工具正常的脸。
5.在本例中,对象名称(基本设置)为Path2。
6.点击好吧将路径导入RoboDK。
您可以修改Path2的方向,如上所述。如果你走近一点,就能看到两条路径的区别。现在可以删除Path1。
下一步是验证你加载的路径段是否正确:
1.选择![]() Path2设置➔更新确保路径在正确的位置。
Path2设置➔更新确保路径在正确的位置。
2.点击选择曲线并选择如下图所示的其他圆。
3.选择![]() 完成.
完成.
你可以减小尺寸哦方法而且收回如上所述的动作。在本例中,您可以再次输入25mm。别忘了更新➔模拟您的曲线跟踪项目保存您的设置。你可以对这部分的其他孔做同样的步骤。
这种构建激光切割程序的方式适用于RoboDK的Fusion 360插件,但它也适用于所有CAD插件。
要使用Fusion 360激光切割功能,请返回Fusion并隐藏您之前所做的草图,如下图所示。
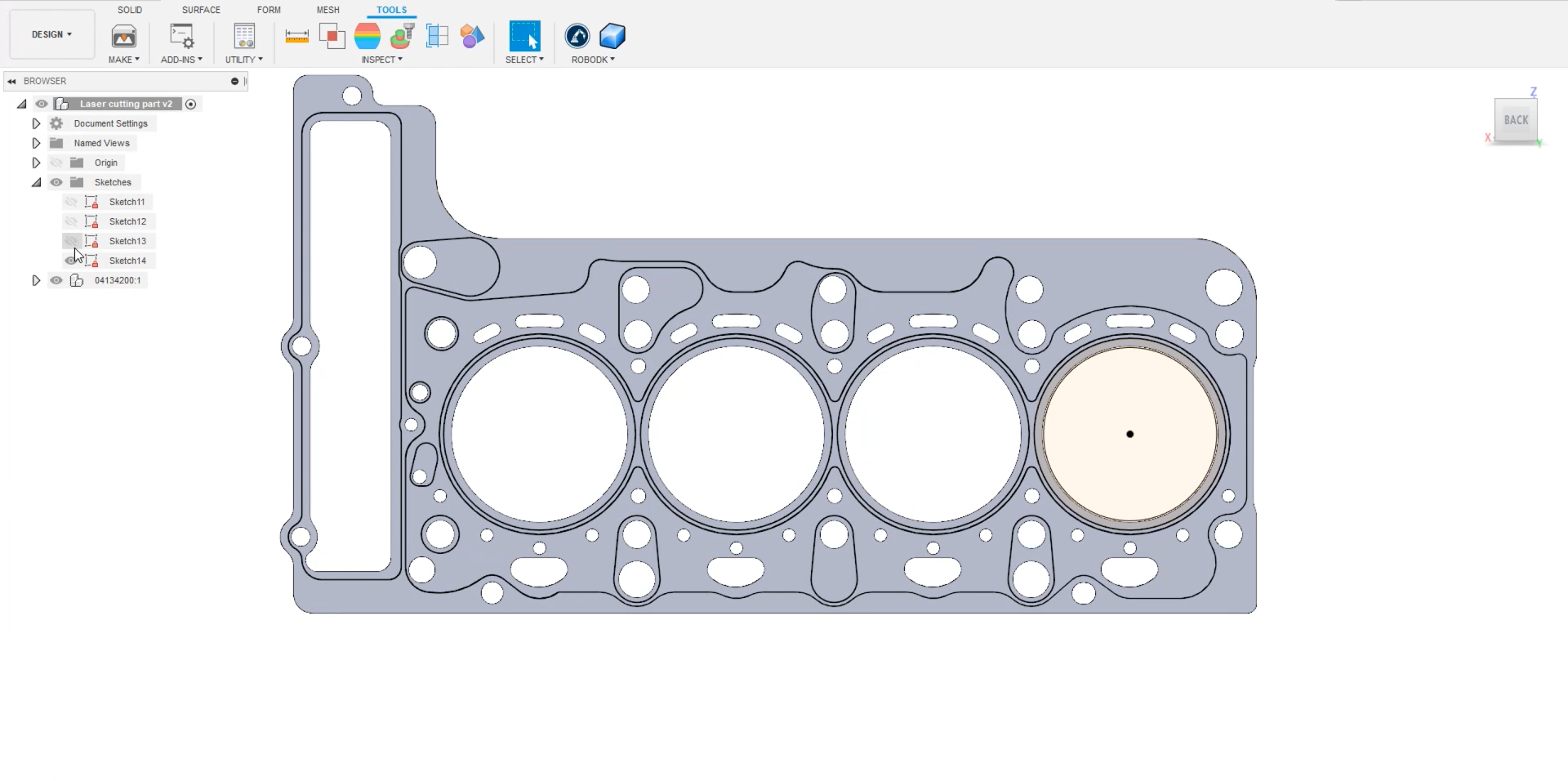
从左上角菜单中的Design部分切换到制造.在工具栏中单击2D切割特征。
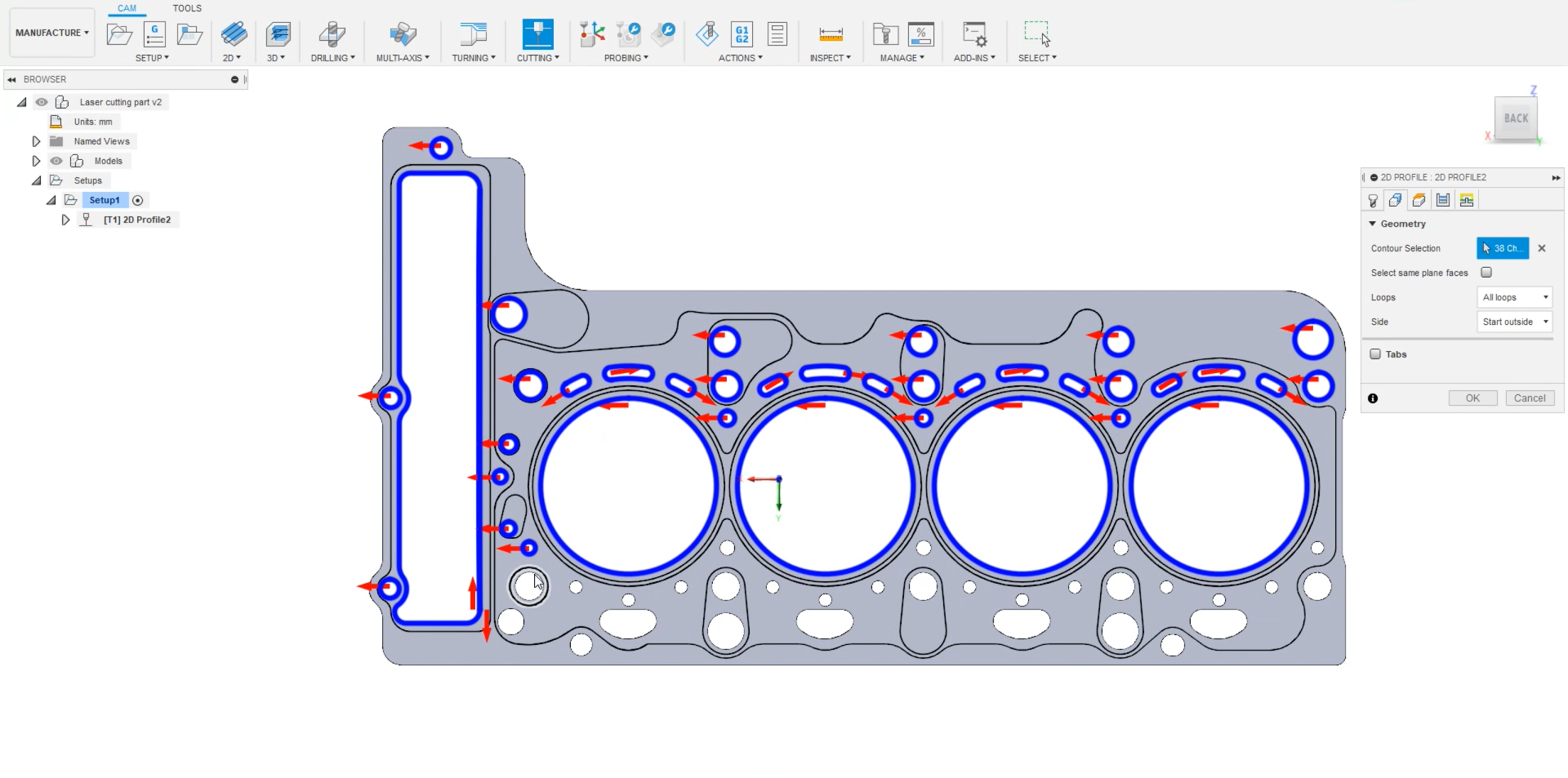
1.选择一个工具.在这个例子中,它是一个1毫米宽的刀具。
2.去几何选项卡在同一菜单和选择圆你要切。在本例中,冲压件金属的所有孔都被选中,如下图所示。
3.点击好吧.
你可以在Fusion 360中通过右键单击你的路径并选择来模拟路径模拟.在设置中,确保您使用的是与模型相同的原点。这样,它将被导出到正确的位置。
1.右击Setup1➔编辑.
2.确保模型的起源在“起源”框中选中。
3.选择好吧.
现在你可以通过选择将你的草图转移到RoboDK工具➔在RoboDK中加载CAM项目在融合360选项卡。
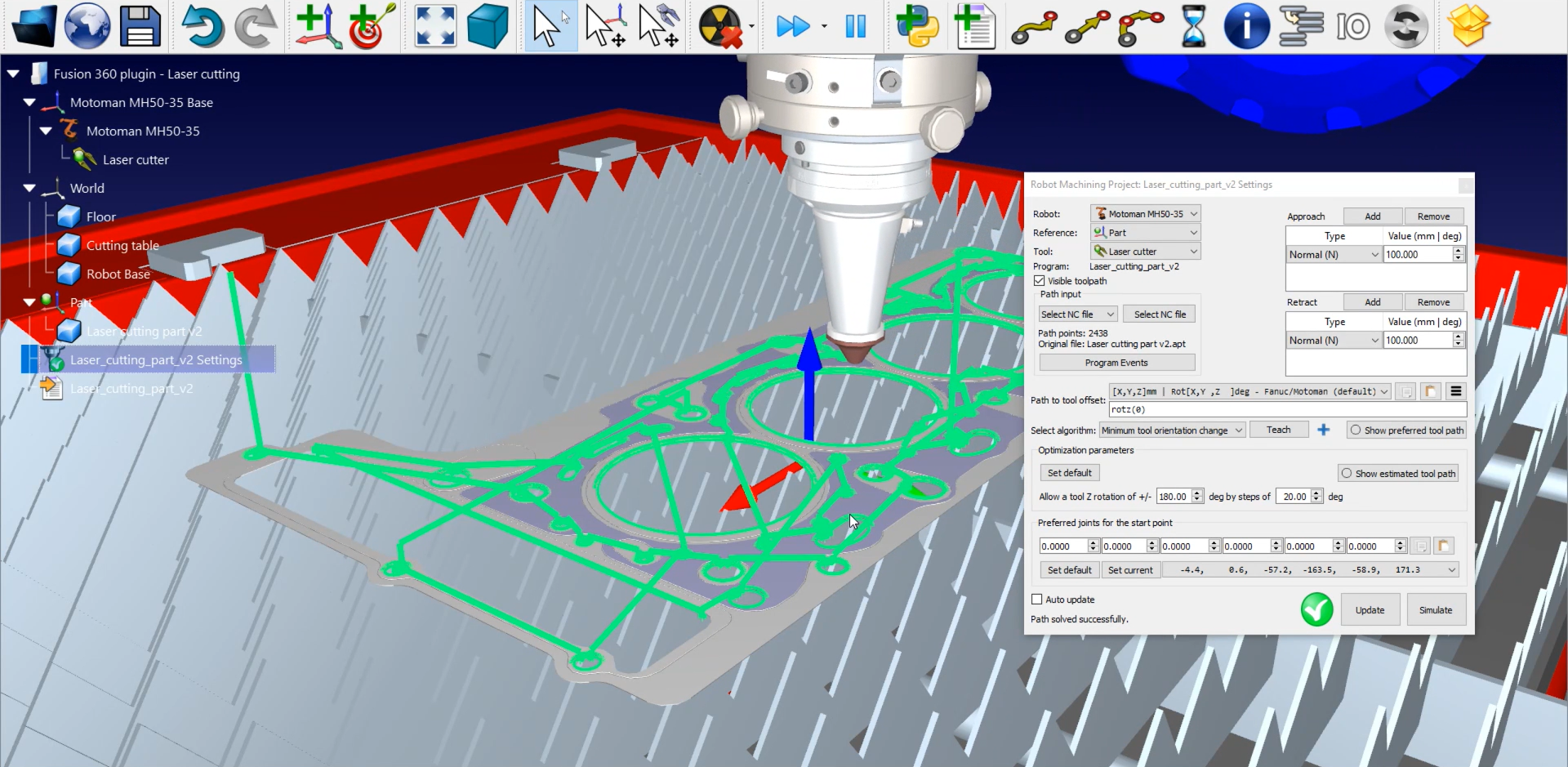
你应该在RoboDK中看到导入的草图。确保删除之前的路径,在本例中为Path2。双击![]() 激光切割部件v2设置开设机器人加工项目。你已经可以看到部分顶部的绿色路径。点击更新➔模拟验证此路径。
激光切割部件v2设置开设机器人加工项目。你已经可以看到部分顶部的绿色路径。点击更新➔模拟验证此路径。
唯一要做的就是项目活动:
1.点击项目活动.
2.让前三个文本框自由,因为您不是用主轴、多种工具或一些特定的RPM来进行加工项目。
3.检查路径开始盒子,写LaserOn只有在路径开始时才能激活激光
4.检查的路径完成框和写LaserOff当路径结束时取消激活。
5.点击好吧而且更新.
要生成机器人程序,右键单击![]() 激光切割部件v2➔生成的机器人程序或按F6.Motoman控制器的程序处理后将出现一个新窗口。
激光切割部件v2➔生成的机器人程序或按F6.Motoman控制器的程序处理后将出现一个新窗口。
现在可以将.pg文件传输到机器人控制器了。