调剂
本节将帮助您在RoboDK中创建用于机器人仿真和离线编程的基本项目。2022世界杯8强赛时间在本例中,使用SolidWorks和RoboDK对川崎RS007N机器人进行了仿真和编程,用于机器人液体分配应用程序。您将学习如何在不到15分钟的时间内将SolidWorks的2D草图转换为真正的机器人程序。
使用SolidWorks的RoboDK插件,您可以轻松地将SolidWorks中创建的3D模型加载到RoboDK。该插件允许您直接从SolidWorks对50多个不同的机器人制造商和500个机器人进行编程。
SolidWorks的RoboDK插件适用于SolidWorks 2016及更新版本,并且是免费的。然而,RoboDK中的某些选项需要购买license。
要启动项目,首先必须在默认库中选择RoboDK的液体分配示例。
本例使用川崎RS007N机器人、点胶工具、零件、油底壳和夹具来固定零件。
装车:
1.选择文件➔![]() 开放
开放
2.定位液体配药实例从RoboDK的示例部分:
C: / / RoboDK /例子Plugin-SolidWorks-Liquid-Dispensing.rdk。
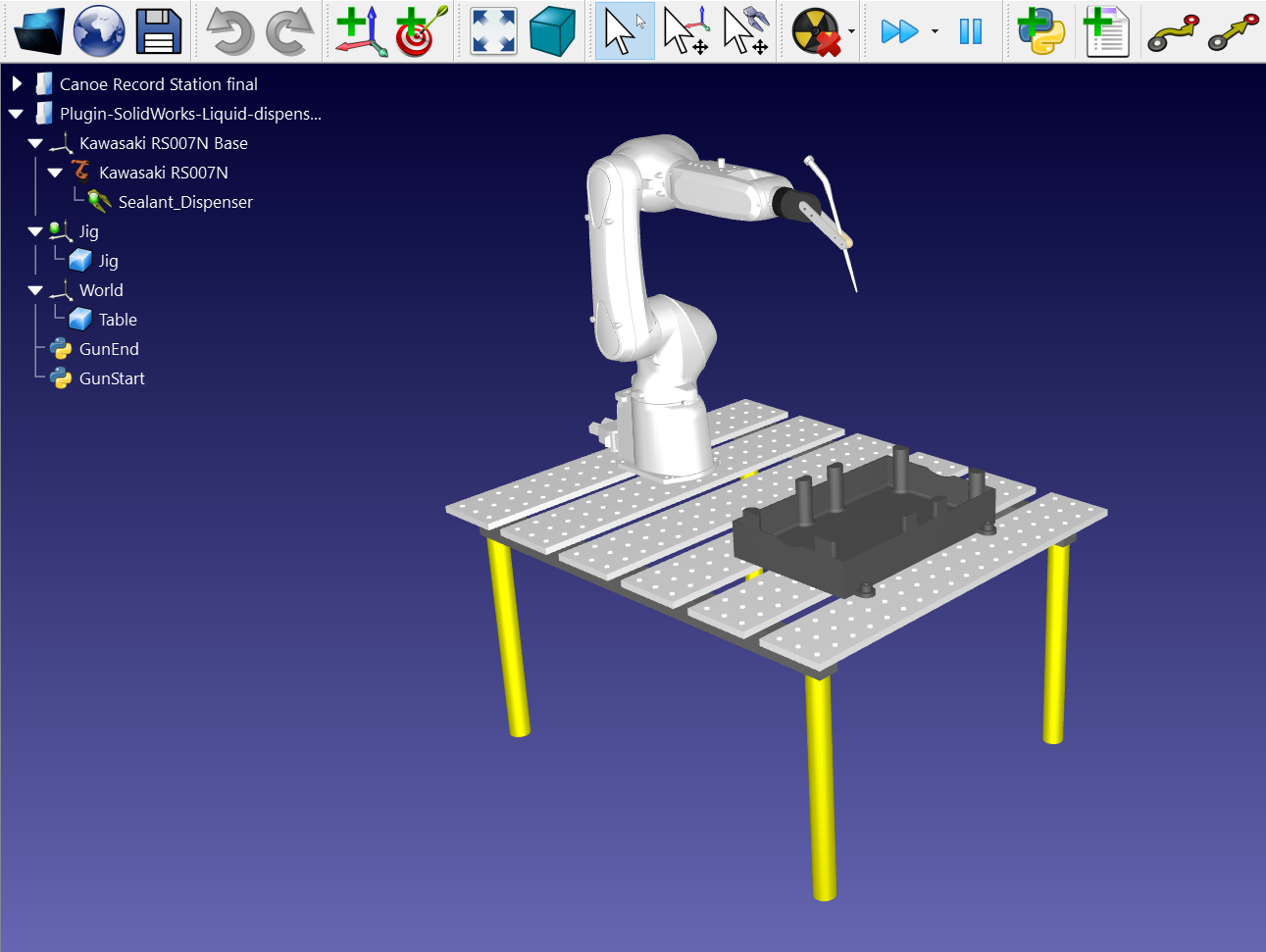
现在您已经加载了工作站,您可以打开SolidWorks。
在SolidWorks中打开3D对象。在这个例子中,3D对象是一个油底壳,上面有需要填充的凹槽。
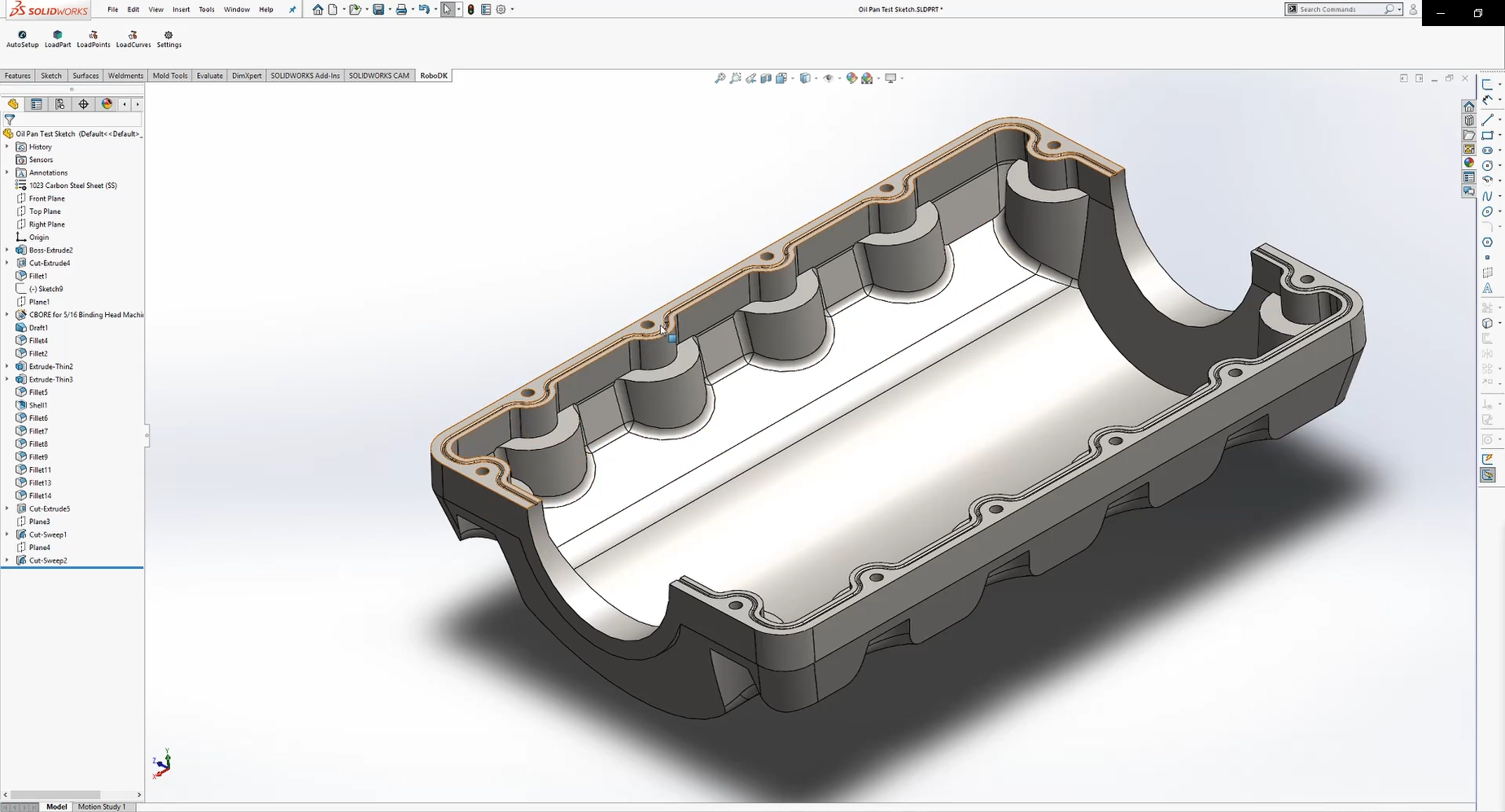
这个项目的目标是在顶部表面水平的凹槽中心分配密封胶,而不把密封胶放在任何一边。这样,密封胶才能顺畅地流动。
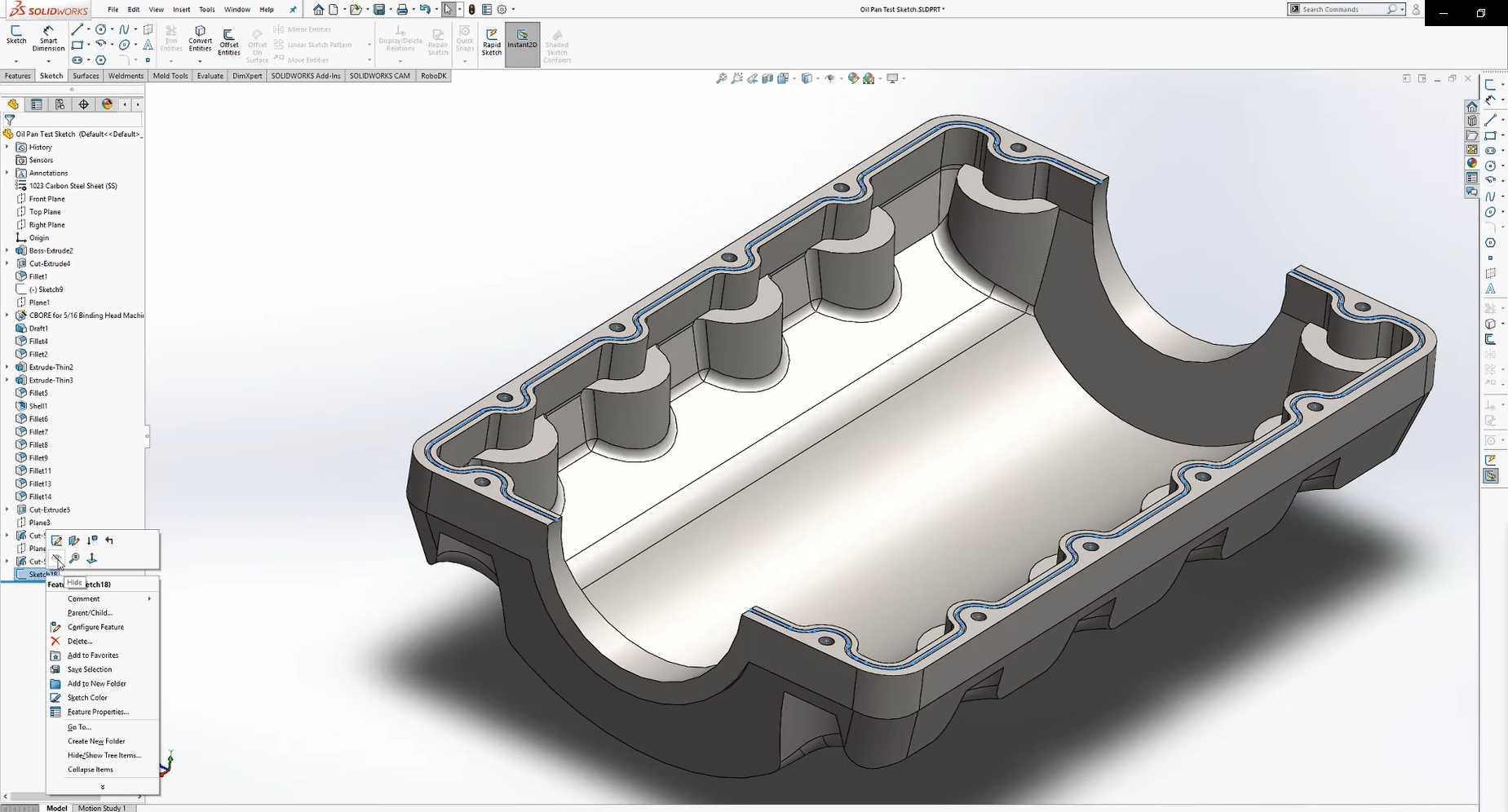
这就是使用2D草图的地方。你必须首先在平面上创建一个新的草图:
1.选择草图选项卡并按下草图按钮创建一个新的
2.选择3D对象的一条边
3.右键单击它并按下选择接触自动选择槽的整个边缘
4.选择弥补实体按钮进入槽的半宽度。在本例中,该值为1.5 mm。
您将获得机器人的完整刀具路径。对油底壳的另一侧做同样的操作。确保你的草图是可见的,如下图所示,以便能够选择它与RoboDK的插件。
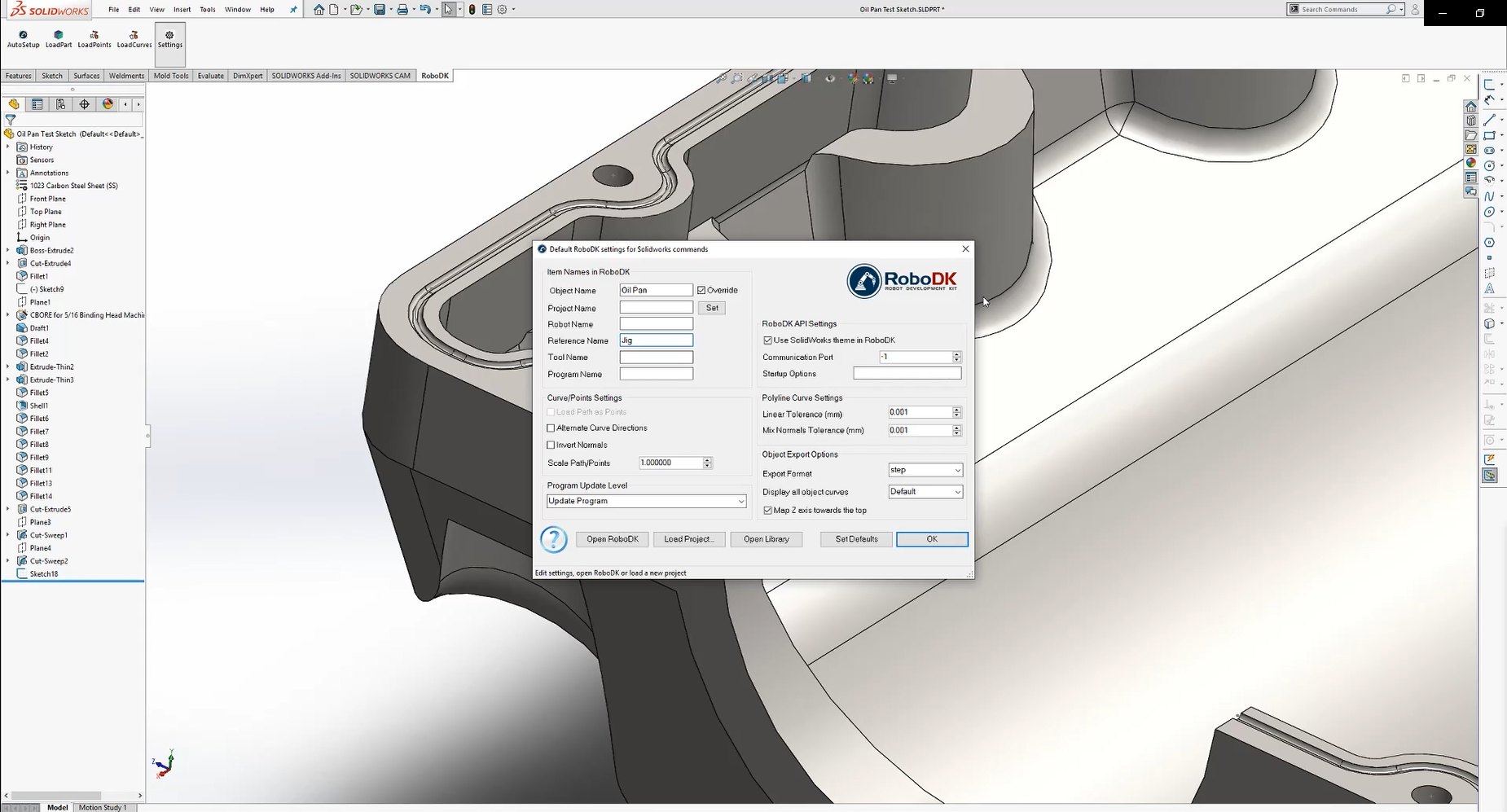
按照以下步骤将您的草图加载到RoboDK:
1.选择“RoboDK”页签,选择![]() 设置。
设置。
2.进入对象名称你想要的机器人dk。在这个例子中,它是油盘。
3.进入引用名称您希望将其导出。在这个例子中,它是Jig。
4.关闭“设置”窗口或选择好吧。
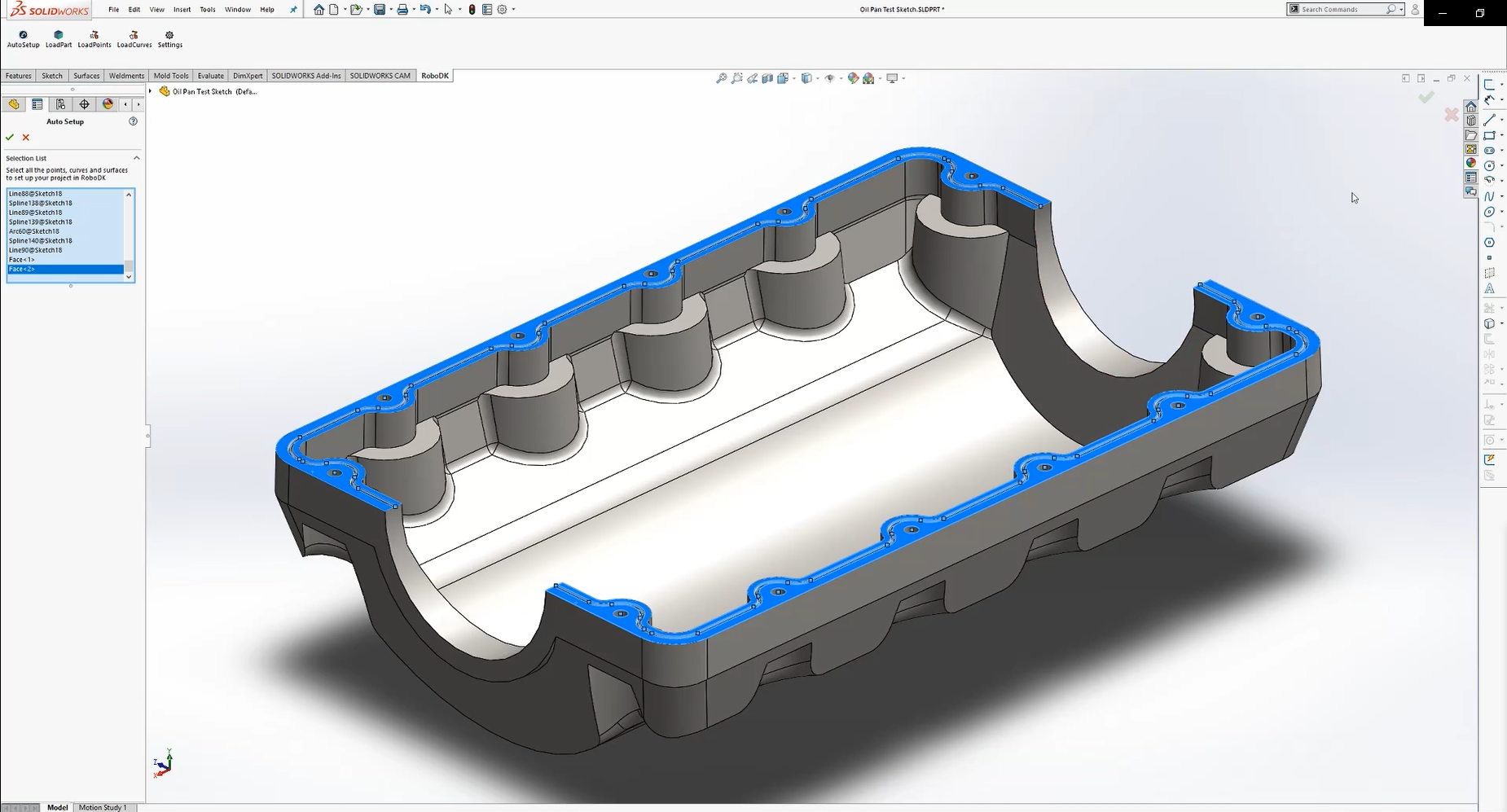
5.选择![]() 自动设置按钮。
自动设置按钮。
6.选择所有线条和顶面你的素描和出版社好吧。
7.选择![]() 完成。项目将在RoboDK中加载。
完成。项目将在RoboDK中加载。
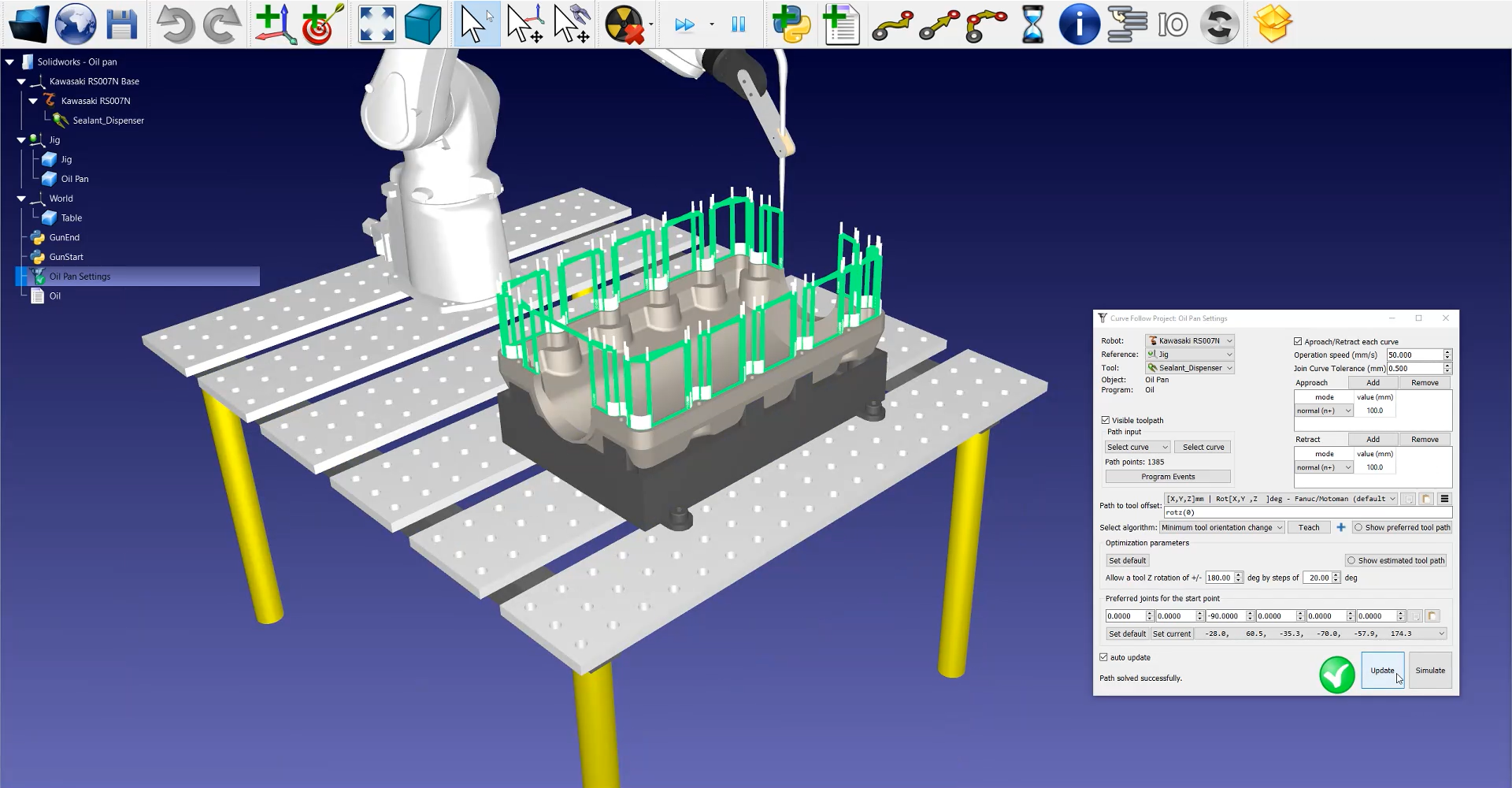
你应该看到部分加载在主动参照系(跳汰架)和新参照系上曲线跟踪工程在RoboDK中遵循工具路径。
下一步是通过选择来验证执行路径部分的顺序是否正确![]() 油底壳设置➔更新➔模拟。在本例中,有必要重新调整顺序。
油底壳设置➔更新➔模拟。在本例中,有必要重新调整顺序。
如果你想重新排序或切换路径部分的意义,请遵循以下步骤:
1.正确的顺序的路径部分点击![]() 油底壳设置➔选择曲线。
油底壳设置➔选择曲线。
2.右键单击车站的空白部分,然后重新选择。
3.回到你人生的起点,然后选择第一部分。确保它指向正确的方向,右键单击它并按下开关有意义如果需要的话。
4.选择自动选择下一条曲线或自动全选以正确的顺序自动选择路径的每个部分。
5.选择完成。这将带您回到RoboDK设置窗口。
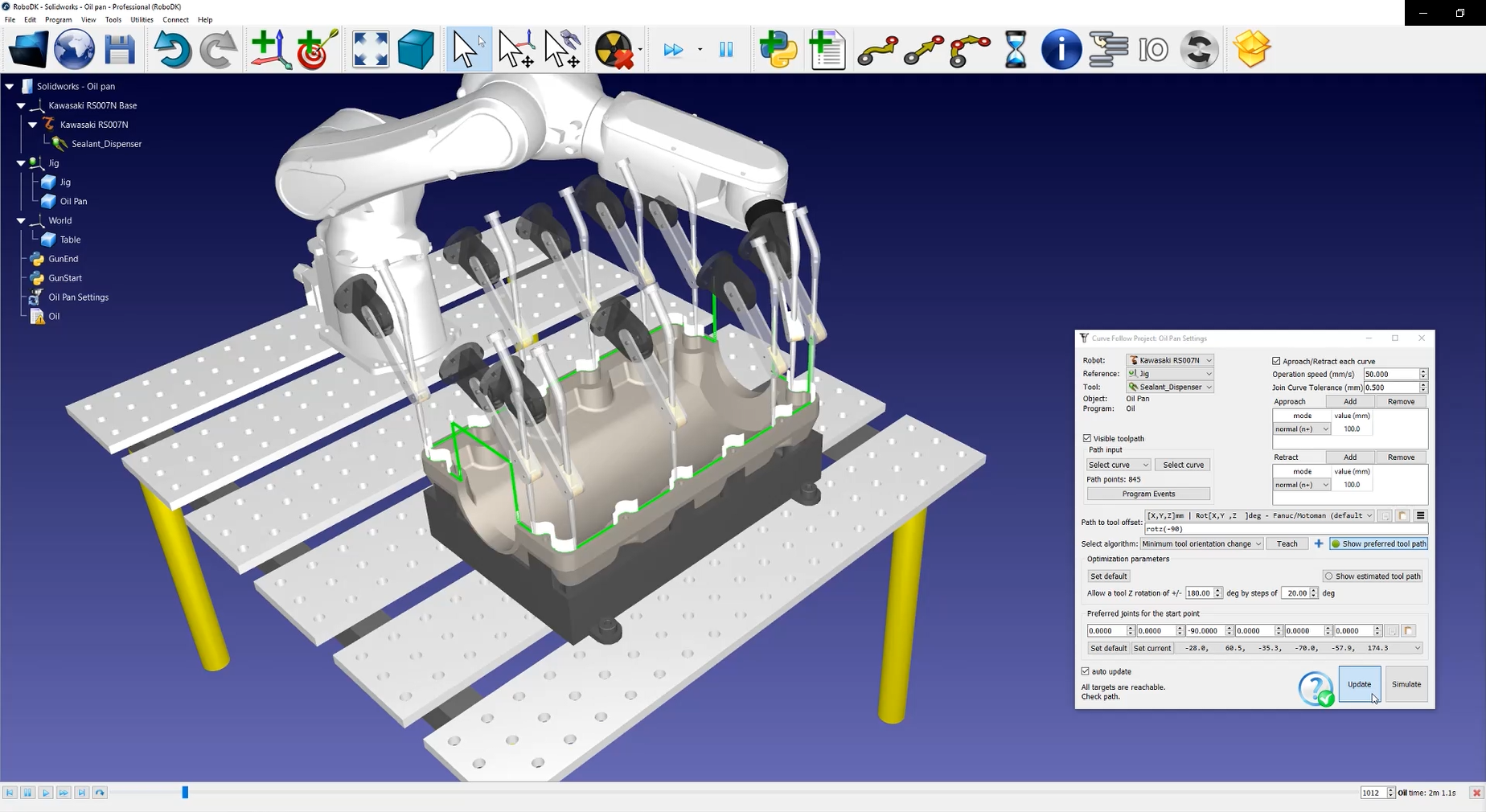
接下来你需要调整工具的方向:
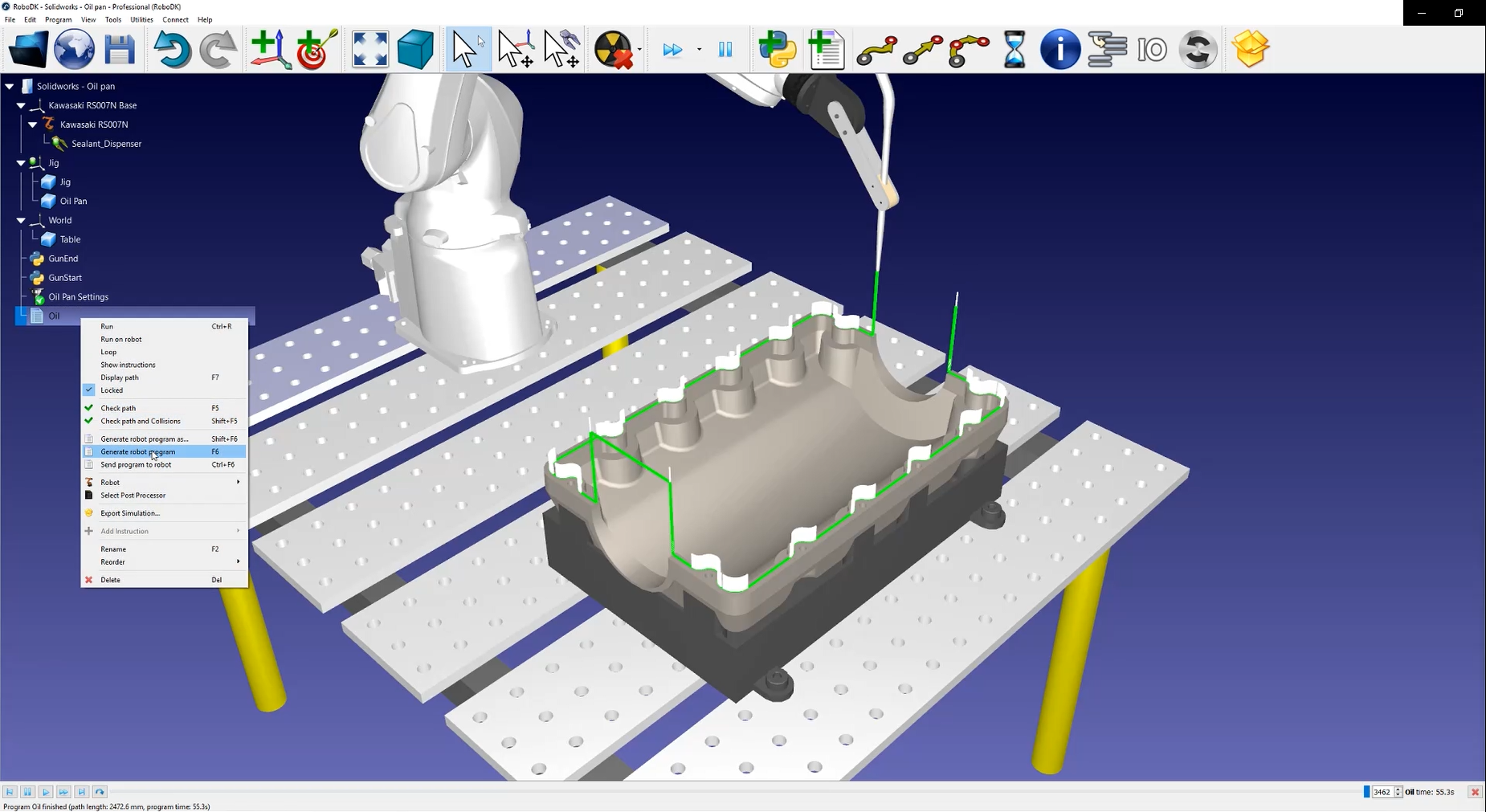
1.选择显示首选刀具路径为了使工具沿着路径可视化,如下图所示。
2.修改rotz价值。在本例中设置为-90度。
3.选择更新➔模拟。
要生成机器人程序,请右键单击![]() 石油➔生成的机器人程序或按键F6。
石油➔生成的机器人程序或按键F6。
pg文件现在可以传输到机器人控制器了。