ABB Roboter
RoboDK unterstützt sämtliche ABB Roboter, die mit der Programmiersprache RAPID angesteuert werden. Dies beinhaltet auch PRG und MOD Dateien (IRC5, S4 und S4C Robotersteuerungen). Diese Dokumentation basiert auf der IRC5 ABB Robotersteuerung.
Die folgenden Abschnitte demonstrieren typische Schritte, die nötig sind um, unter der Verwendung eines ABB Roboter Teach Pendants/Programmiergeräts, ein neues Programm vorzubereiten.
Folgen Sie diesen Schritten um ein Programm Modul (MOD Datei) von einem USB Stick zu laden:
1.民意调查您ABB➔Programm Editor
2.民意调查您Module, im oberen Bildschirmbereich
3.民意调查您Datei➔Modul laden (Es ist nicht wichtig, dass der Programmzeiger / PP verloren geht)
4.民意调查您die MOD Datei vom USB Stick
5.民意调查您OK
Folgen Sie diesen Schritten um ein spezifisches Programm auf dem ABB Robot Controller zu starten:
1.Gehen Sie in den manuellen Modus. Der Text “Manual”, wird auf der Oberseite des Menüs angezeigt.
2.民意调查您:ABB➔program Editor➔Debug➔PPto routine
3.民意调查您das von RoboDK erstellte Programm. Der Standardname lautetmain_RoboDK.
4.Halten Sie den Totmannschalter des Pendants gedrückt. Der Statustext „Motors On“, sowie das orange Roboterlicht sollten erscheinen.
5.民意调查您den Play Knopf auf dem Pendant, um das Programm zu starten.

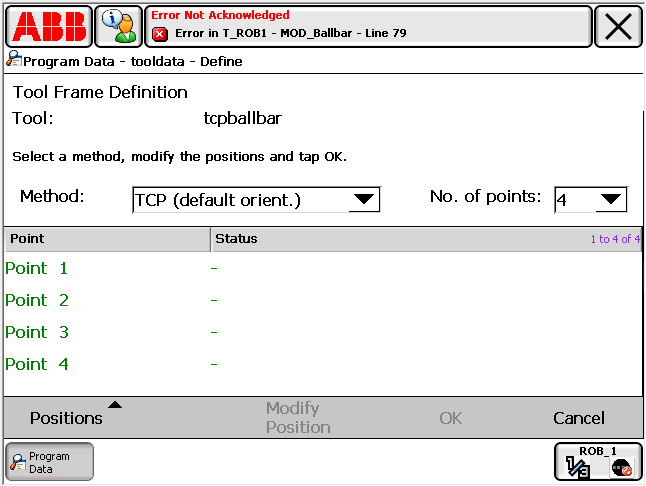
Die folgenden Schritten erlauben es Roboterwerkzeuge zu erstellen bzw. zu bearbeiten (TCP, oder auchtooldatain der ABB Programmiersprache):
1.民意调查您ABB➔程序数据➔tooldata(Doppelklick)
2.Ebenfalls ist es möglich bereits bestehend Toolvariablen zu bearbeiten.
3.Sobald das Werkzeug definiert wurde, können die X,Y,Z Werte des Werkzeugs hergestellt werden.

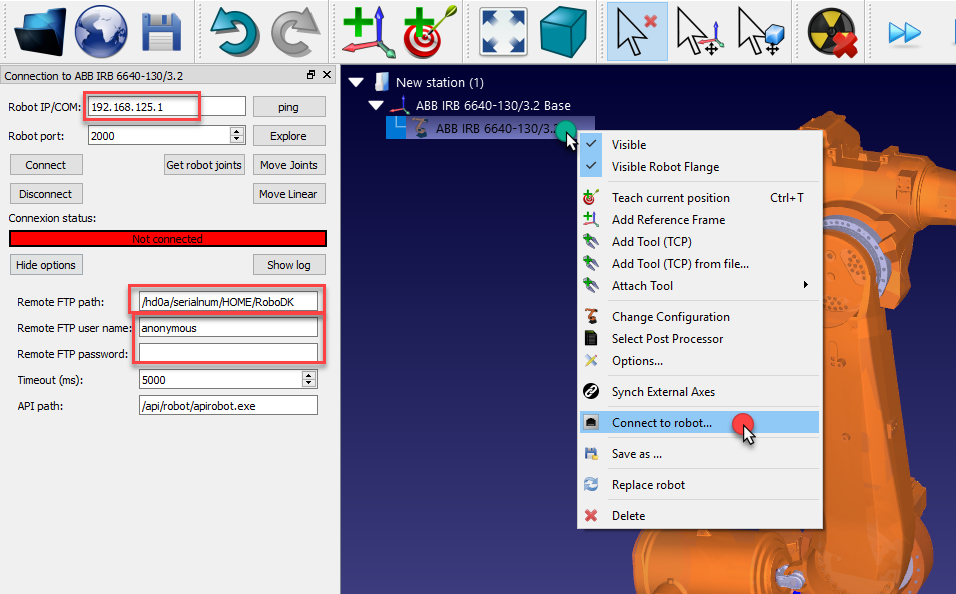
Programme können einfach mittels FTP aus RoboDK zu einem ABB Roboter übertragen werden:
1.Rechtsklicken Sie auf den Roboter in RoboDK
2.民意调查您Roboter verbinden…
3.Geben Sie die IP des Roboters ein
4.Geben Sie den FTP Pfad ein.
Der vollständige Pfad kann aus dem Handprogrammiergerät oder mittels des FileZilla FTP Client ermittelt werden.
5.Geben Sie die FTP Anmeldedaten ein (anonymous ist dabei der Standardwert)
Sobald ein RoboDK Programm zur Übertragung bereit ist, gehen Sie wie folgt vor:
1.Klicken Sie mit der rechten Maustaste auf ein Programm in RoboDK.
2.民意调查您Programm an Roboter senden (Ctrl+F6)aus
Dies erzeugt das Programm und versucht, es an die Robotersteuerung zu übertragen. Ein Fenster erscheint, sobald die FTP-Übertragung erfolgreich ist oder ein Fehler auftrat.

Wenn Programme im laufenden Betrieb mit Hilfe von FTP übertragen werden, müssen sie auf der Roboterseite mit der RAPID-Programmierung geladen werden. Im folgenden Beispiel wird das Programm main_RoboDK von einem Modul namens MOD_Pick_and_place ausgeführt:
PERS bool progloaded := FALSE;
. . .
PROC Run_Program_FTP()
IF (progloaded=FALSE) THEN
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ELSE
UnLoad "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = FALSE;
Load "/hd0a/serialnum/HOME/RoboDK/MOD_Pick_and_place.mod";
progloaded = TRUE;
ENDIF
%main_RoboDK%; !call the main program from the module send and loaded
ENDPROC
Robotertreiber bieten eine Alternative zur Offline-Programmierung (ein Programm wird generiert, anschließend zum Roboter übertragen und ausgeführt). Mit Robotertreibern ist es möglich, eine Simulation direkt am Roboter durchzuführen (Online-Programmierung). Weitere Informationen finden Sie im AbschnittRobotertreiber.
Eine Verbindung zwischen RoboDK und dem ABB-Roboter kann hergestellt werden, um den Roboter automatisch von einem angeschlossenen PC mit RoboDK zu bewegen. Dies ermöglicht die Verwendung der OptionRoboDK auf Roboter ausführenfür die Online-Programmierung, sowie ebenfalls das Debugging. Die Verbindung kann über eine Standard-Ethernet-Verbindung (TCP / IP) hergestellt werden.
Folgen Sie diesen Schritten um einen RoboDK Treiber für ABB Roboter einzurichten:
1.Stellen Sie eine Ethernet Verbindung zwischen dem Computer und dem Roboter her.
2.Übertragen Sie die DateienMainModule.modundCOMM.modauf den Roboter (USB Stick, FileZilla FTP Transfer oder RobotStudio können verwendet werden). Diese sollten als Haupttasks verwendet werden.
3.Befolgen Sie diese Schritte auf dem ABB Teach Pendant/Programmiergerät, um das Programm von diesem zu laden:
a.民意调查您ABB➔Programm Editor
b.民意调查您TasksundProgramme(oben)
c.民意调查您Module anzeigen(unten)
d.民意调查您Datei➔Modul laden…(wählen Sie Ja um den Programmzeiger zu verlieren)
e.民意调查您dieCOMM.modDatei und anschließend OK.
f.民意调查您dieMainModule.modDatei und anschließend OK.
4.Führen Sie dasHauptprogrammaus (Sie finden dieses unter MainModule.mod).
CONST string server_ip := "192.168.125.1";
Der Standard Kommunikationsport/-anschluss für das erstellte Programm ist 2000, kann jedoch ebenfalls abgeändert werden.