
需要使用多个末端执行器与您的机器人?没问题!你可以添加一个工具更换器。但是,离线编程就这么容易吗?2022世界杯8强赛时间以下是如何在RoboDK中使用它们。
你为你的任务选择了完美的末端执行器从米市场上任何可用的工具。你把工具装到机器人上在5分钟内将其添加到RoboDK中。你很容易做到用RoboDK编程末端执行器。
你的机器人和末端执行器配合得很好。
但是,你遇到了一个问题。
部分任务需要你使用不同的末端执行器。
“没问题,”你想。“我要加一个工具更换器。”
但是,如何在离线编程中使用工具更换器呢?2022世界杯8强赛时间
本文为我们的用户提供这个常见问题的答案。
换刀机是如何编程的
工具更换器的编程非常简单。
每次工具更改都遵循以下顺序:
- 把机器人移到换刀处。
- 检查指示刀具是否正确对准的信号,如果有的话,请使用换刀器
- 激活工具更换器。
- 检查显示换刀是否成功的信号,如果换刀器可用。
- 把机器人移开。
控制信号的确切顺序将根据您的品牌和换刀器的型号而有所不同。例如,气动ATI QC-20遵循上述基本顺序,而Schunk慢波睡眠需要额外的断电步骤以避免电气损坏。然而,顺序将是非常相似的大多数换刀。
对于使用2022世界杯8强赛时间RoboDK进行离线编程,我们可以将这五个步骤分类如下:
- 运动的步骤-步骤1和5 -您使用RoboDK中的关节移动和线性移动的组合将机器人移动到工具架上的位置。
- 传感器和控制步骤-步骤2到4 -你用机器人语言写一个外部函数来执行对接序列。
准备添加换刀器到RoboDK
在与RoboDK一起使用工具更换器之前,您应该准备三件事。
这些都是:
1.确保兼容性
检查您的换刀器是否与您的机器人和工具兼容。确保刀具上的配件与换刀器上的配件相匹配,并确保换刀器与机器人法兰的末端相匹配。
同时,计算静力矩载荷并确保机器人的有效载荷高于换刀器和最重刀具的总重量。
2.将工具更换器模型加载到RoboDK(可选)
如果你想在RoboDK中有一个可视化的工具更换器表示(这不是至关重要的,但可以很好),你需要将其添加为CAD文件。这涉及遵循与您所遵循的几乎完全相同的过程给RoboDK加一个末端执行器。
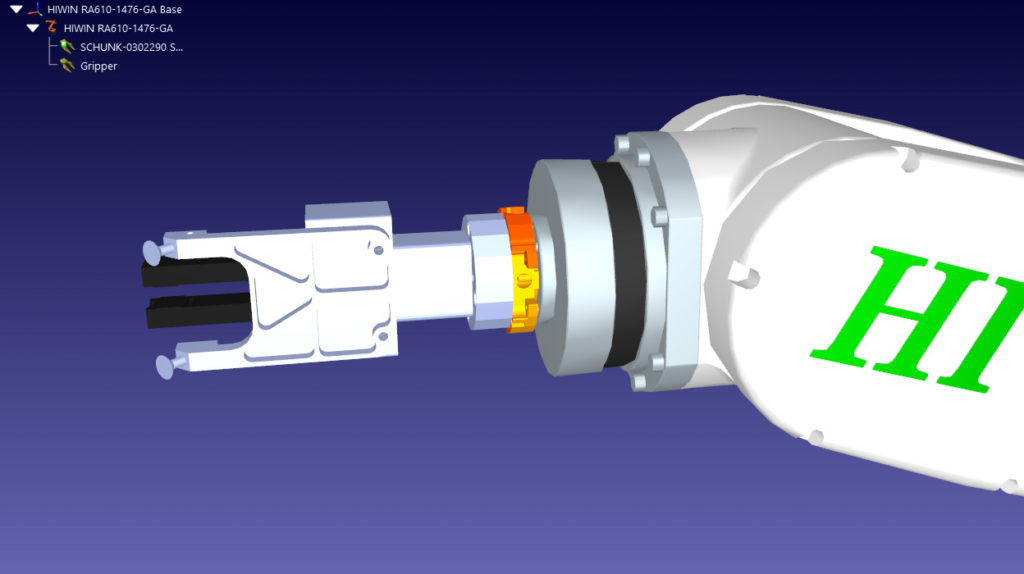
换工具通常由两部分组成:
- 工具架-这是固定的环境,将表示为一个对象(或组装)在RoboDK。
- 工具改变者本身-在RoboDK中,它作为工具连接到机器人法兰上,就像任何其他末端执行器一样。
3.创建工具更换器的程序功能
您还需要在机器人程序中编写一个或多个激活换刀器的功能。这和创建控制末端执行器的函数的过程。然而,它可能涉及到更多的步骤,并且更复杂一些。
在工具更换器的操作手册中,您应该找到标题类似“耦合序列”的部分。这将包括对序列的详细描述。这是个好主意画一个序列流程图在将其写成代码之前,确保没有遗漏任何步骤。
在RoboDK中使用工具更换器的3种方法
一旦您的准备工作完成,有三种方法可以使用RoboDK中的工具更换器。这三种方法在控制真正的机器人系统时同样有效。然而,有些在模拟中会比其他看起来更真实(并且需要更多的工作)。
1.最简单的方法-一个无形的工具更换,站和工具
您不需要在模拟中显示任何东西来创建一个功能性的工具转换器。您可以使用空工具来表示换工具者和工具。这将创建必要的工具参考框架,但没有工具的可视化表示。
你需要在你的模拟中添加以下内容:
- 在你的工具更换器的每个位置的目标点(程序菜单>教学目标)
- 每个工具的“空工具”(程序菜单>添加空工具)
然后,使用以下编程顺序执行换刀操作:
- 将机器人移动到工具更换器中的目标位置。
- 通过设置工具框架来选择工具(程序菜单>设置工具框架指令)。
- 调用工具切换功能(程序菜单>程序调用指令)
简单!
在模拟中没有任何视觉上的改变,但它在真实的机器人上工作得很好。
2.半可视化的方式-创建可视化工具
如果您想在仿真中添加一些动画,可以像上面描述的那样引入工具的可视化模型。这些工具都应该连接到机器人的法兰上,但一次只能看到一个工具(活动工具)。
然后,您只需要在上述步骤2之后(当您设置新工具框架时)添加以下步骤:
- 隐藏旧工具(程序菜单>模拟事件指令>隐藏对象/工具)
- 显示新工具(程序菜单>模拟事件指令>显示对象/工具)
这是所有!现在,该工具将在模拟中明显改变。
3.完整的动画方式-动画一切
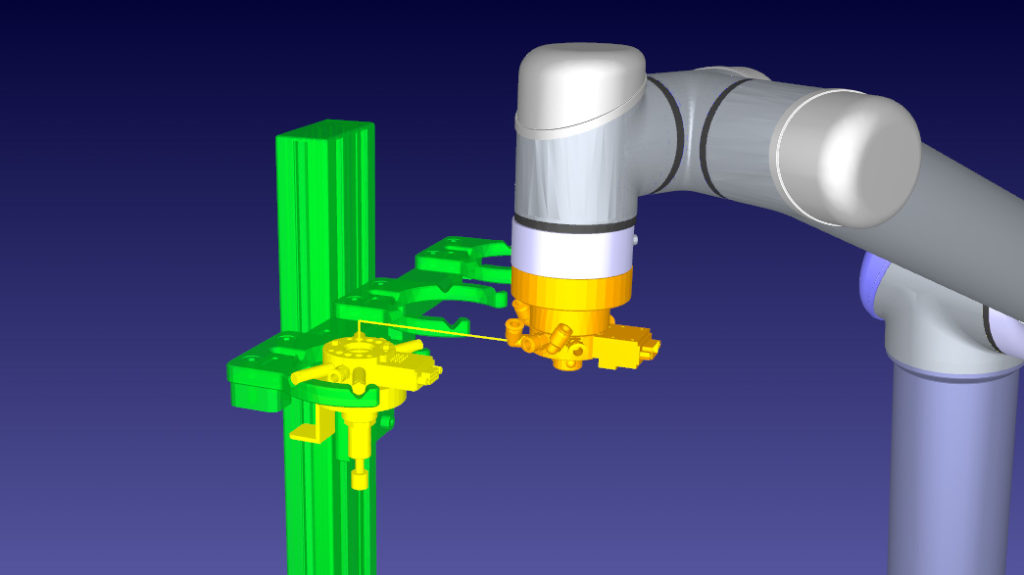
现在唯一缺少的是在模拟中将旧工具挂在工具架上。从功能的角度来看,这不是必需的,但看起来很酷。
为了实现这一点,你需要在你的模拟中添加更多的对象:
- 工具架,如果你还没加的话。
- 每个工具的“假”副本,你应该“挂”在正确的位置上的工具架。
与前一种方法一样,您所需要做的就是在模拟的某些点隐藏/显示相关模型。
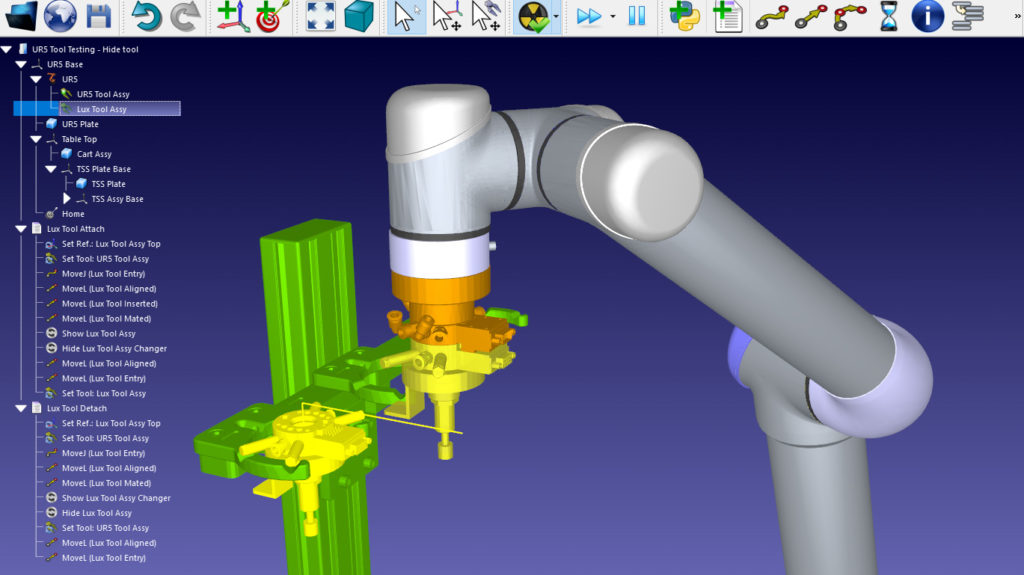
要从工具架上拿起工具,将这些指令添加到程序中:
- 隐藏附着在机器人法兰上的工具。
- 显示附在刀架上的虚拟工具对象。
要将工具放置到刀架上,请在程序中添加以下说明:
- 隐藏附在刀架上的虚拟工具对象。
- 显示附在机器人法兰上的工具。
在哪里找到一个工作示例
理解这个过程的最好方法是观察它的实际工作。
让我们使用用户RBE发布的一个真实示例在我们的论坛上。他们正在用换刀器把工具放在刀架上。他们对机器人进行了编程,让它移动到刀架上,然后停用刀具。但是,在模拟中,视觉上没有任何变化。工具仍然连接在机器人上,工具架上没有悬挂任何东西。
这是一个完美的例子,程序可以在真正的机器人上正常工作,但在模拟中看起来是错误的。
Jeremy(一个RoboDK管理员)提供了一个解决这个问题的方法,其中包括我上面列出的步骤。RBE只需要隐藏工具,同时他们使虚拟工具在工具架上可见。
你自己注册论坛,然后你可以下载Jer2022世界杯国家队名单emy的项目文件看看是怎么做的。
工具改变者将如何改进您的应用程序?请在下面的评论中告诉我们,或者加入我们的讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛。


