
什么是力控制?为什么力控制更适合机器人加工?以下是如何提高RoboDK的加工质量。
机器人是实现高质量加工的一种高度灵活的方式。尽管与数控机床相比,机器人的刚度相对较低,但它们能够执行广泛的加工任务。正如我们在前面的文章中所解释的那样,它们还有一些额外的好处机器人能胜过机器人Mac的数控机床吗h工人吗?
然而,有一个问题。硬材料对低刚度机器人来说是一个挑战。当刀具与坚硬材料表面接触时,机器人会发生偏转,钻孔变得不准确。在表面施加更大的力只会让问题变得更糟——机器人偏转得更多,或者在极端情况下,变得不稳定,无法控制地振动。
一旦你理解了基本原理,强制控制就是克服这个问题的好方法。
什么是力控制?
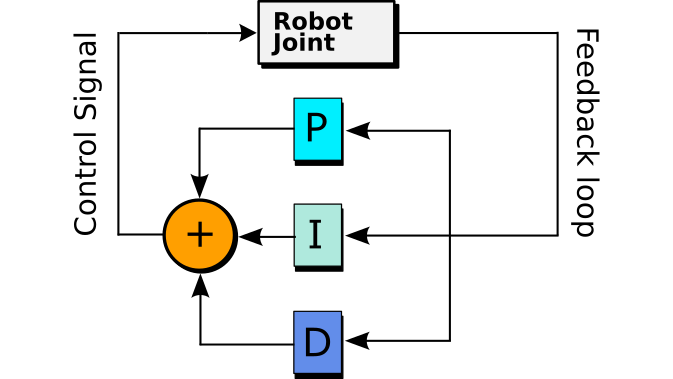
机器人基本上只是一种先进的控制系统。像其他控制系统一样,它们是由反馈回路控制的。机械臂最常见的设置是有一个人PID控制器对于每个关节,它确保关节在被指示移动时实际到达期望的位置。
机器人中常用的控制有两种:运动控制和力控制。
运动控制
机器人的基本控制方法是位置控制。在这种情况下,机器人程序指示机器人的每个关节移动到一个位置。然后,每个关节处的PID控制器使用来自位置传感器的信号作为反馈,以检测何时到达所需位置。
当给机器人一个联合行动命令,每个关节将尽快移动到所需的位置。当一个线性移动或循环移动使用时,机器人控制器会发出一系列的位置命令来实现被控路径。
位置控制是几种运动控制方法中的一种,其他是速度控制和加速度控制。这些都是相互关联的,因为速度是位置的导数,加速度是速度的导数。
力的控制
力控制比运动控制更复杂,因为它是应用在机器人工具上,而不是一个关节一个关节的基础上。一个力-扭矩传感器安装在机器人的手腕上,作为反馈来检测施加在工具上的力。
力控制器不是试图达到一个特定的位置,而是试图在工具上实现一个特定的力。机器人将对环境施加越来越大的力,直到达到所需的力。
有几种力控制方法,但最常见的加工操作是混合位置/阻抗控制。当机器人在自由空间中移动时,它的工作原理与位置控制完全相同。然而,当它与某物碰撞时,机器人的行为就像一个虚拟弹簧——机器人离指示位置越远,它施加的力就越大,试图让它回到正确的位置。通过设置虚拟弹簧的刚度,就可以限制机器人所能施加的最大力。
力控制在机器人加工中的应用
力控制通常更适合加工操作,因为你可以精确地控制施加在工件材料上的力。这提高了钻井作业的质量,如下面的示例所示。
想象一下,你正在用一个手持式电钻在钢板上钻一个洞。你把钻头对准你想要的孔的位置。

你会用这两种方法中的哪一种来施加一个力?
- 开始时要用温和的压力,直到洞开始形成,然后逐渐加大力度。
- 立即用你所能用的最大的力量把钻头推入金属。
希望您选择了第一个选项。
为什么第二种选择不可行?如果你曾经用钻头这样做过,你就会知道钻头要么在材料上不受控制地打滑,要么立即断裂。几个方向的力量都太大了。要么你的柔顺手臂无法承受这些力量,要么钻头不能。
当指令机器人只使用位置控制钻入材料时,相当于使用第二种方法。机器人无法检测到这些力,所以它只能尽其马达所能地推动。
力控制确保施加的力永远不会达到如此高的力。
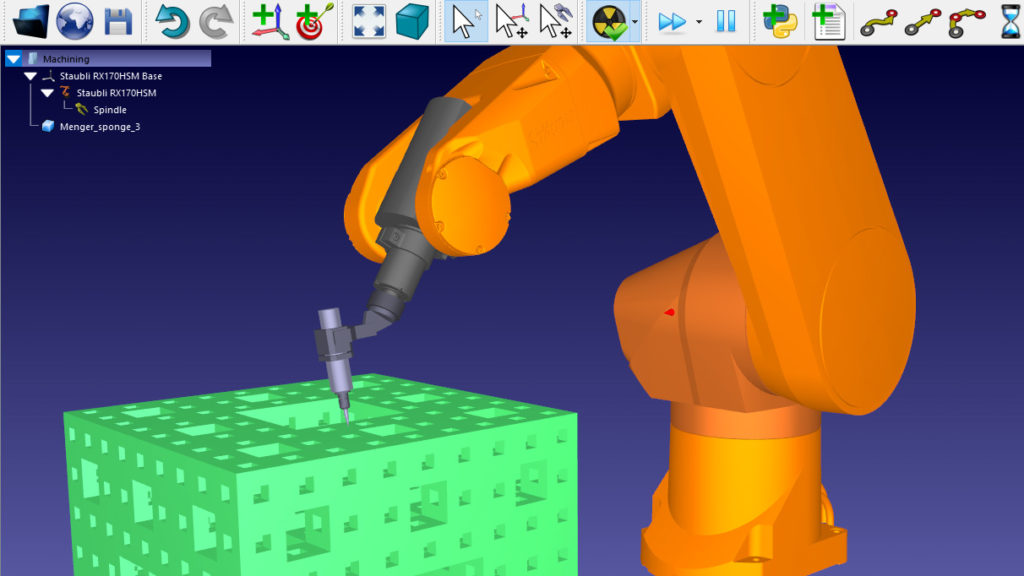
如何在RoboDK中使用力控制
在RoboDK中,有两种方法可以为机器人添加力控制器。由于力控制是一种先进的控制方法,它们确实需要您使用编程。
选项1:创建自定义后处理器
可能最简单的选择是为机器人创建一个自定义后处理器,并在其中包含力控制命令。
后处理器是把你的RoboDK模拟变成机器人可以理解的代码。参见我们之前的文章有关如何创建自定义后置处理器的信息。
如果制造商为您的机器人提供力控制,则此选项将容易得多。例如,KUKA IIWA具有阻抗控制模式哪些可以在几行代码中激活.
如果没有这样的选择,您要么必须用机器人编程语言编写自己的力控制器,要么从机器人制造商的合作伙伴处获得另一个解决方案。
选项2:使用RoboDK API
第二种选择是使用您的计算机通过RoboDK API直接控制机器人。这允许您通过使用RoboDK作为主控制器和机器人控制器作为从控制器在计算机上实现力控制器。
这个选项的优点是,即使机器人制造商没有提供力控制,您也可以使用力控制。使用其中一种语言由RoboDK支持(Python, c#, c++和Matlab),您可以选择许多库和api,这些库和api可以使您更容易实现所选控制器。
这当然不是一个“现成的解决方案”,因为您几乎肯定必须进行大量编程才能使控制器可靠地工作。然而,这是一个灵活的选择,可以与大多数机器人一起使用。
值得庆幸的是,越来越多的机器人制造商自己或通过第三方合作伙伴为他们的机器人提供力控制。通过少量的研究,而不是大量的编程,您可以使用RoboDK来提高力控制机器人加工的质量。
你对力的控制有什么问题吗?请在下面的评论中告诉我们,或者加入我们的讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛.


