使用RoboDK TwinTrack,您可以探测和定位您的坐标系统(或参考系),以定位机器人工作区中的对象。
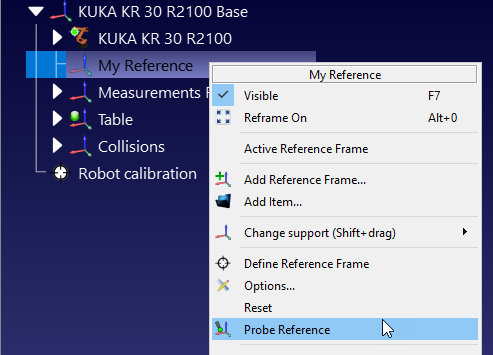
右键单击您的坐标系统并选择调查参考.
然后你应该按以下顺序探测3个点:
1.原点的第一个点。
2.沿着正X轴的第二个点。
3.第三个点在Y轴正方向。
通过正确设置你的坐标系统,你可以远程编程机器人。例如,如果你有一个正确定义的夹具,当你想要编程一个新部件时,你可以在办公室或家里简单地做,甚至不需要靠近你的机器人。