通用的机器人
通用机器人(UR)可以通过两种不同的方法用RoboDK编程:URP文件和Script文件。
1.图形用户界面(URP文件):URP程序是使用机器人的教学挂件的触摸屏创建的。URP程序可以有一个或多个SCRIPT文件作为子程序。URP程序在后台在机器人控制器上转换为SCRIPT程序,然后再执行。
2.脚本文件:脚本程序使用UR Script编程语言。和其他编程语言一样,UR Script也有变量、类型、控制语句流、函数等。此外,UR Script有几个内置的变量和函数来控制I/O和机器人的运动。
使用RoboDK,您可以生成可以由UR机器人执行的SCRIPT和URP文件。此外,它是可能的在机器人上执行程序如果机器人连接到计算机,则从RoboDK。
RoboDK还可以将脚本文件导入模拟器。这允许您模拟SCRIPT程序、修改它们并重新导出它们。
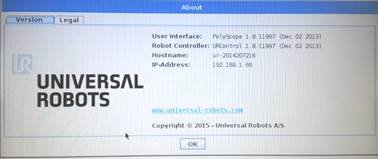
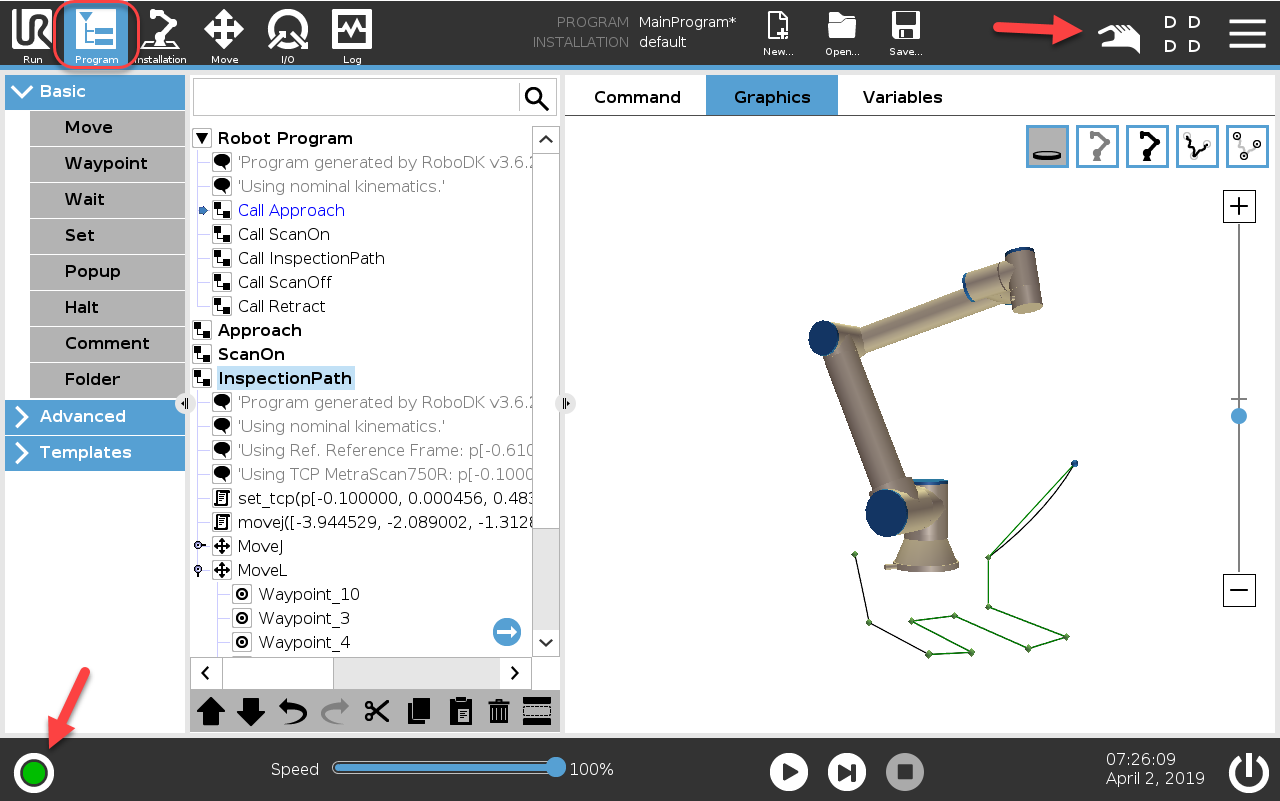
UR机器人的图形用户界面叫做PolyScope(如下图所示)。

机器人的IP需要直接从RoboDK模拟器执行程序。也可以通过FTP传输程序文件。
机器人的IP可以从关于菜单在UR的教学挂件主屏幕。
机器人必须通过以太网连接到计算机(直接连接或通过网络)。Ping测试允许测试网络链路是否已正确建立。
机器人驱动程序提供了离线编程(生成程序,然后将程序传输给机器人并执行)的替代方案2022世界杯8强赛时间。你可以从RoboDK直接在机器人上运行模拟(在线编程)。更多信息,请参阅机器人司机部分。
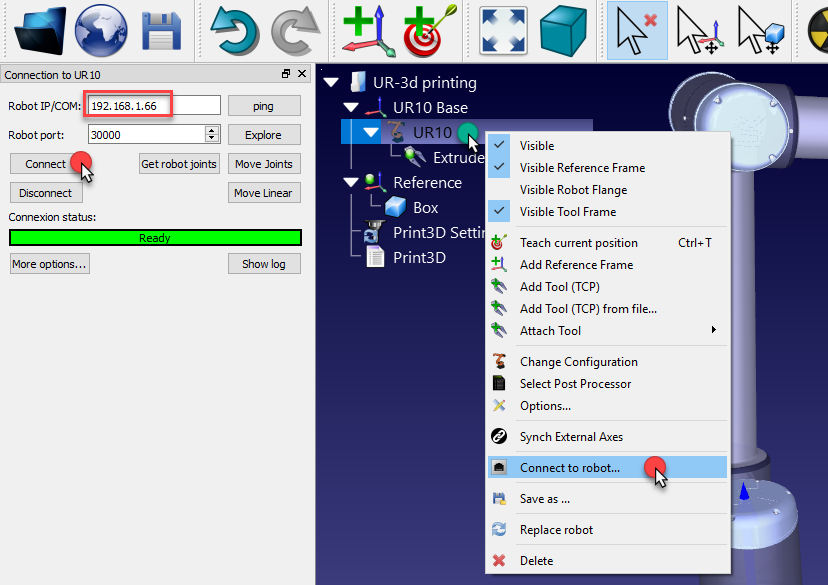
按照以下步骤连接到RoboDK中的机器人:
1.右键单击RoboDK中的机器人
2.选择:![]() 连接到机器人……
连接到机器人……
3.输入机器人的IP
4.选择连接.
应该显示一条绿色消息准备好了如果连接成功。
机器人可通过选择进行移动得到机器人关节,移动关节而且线性移动,从连接菜单。
从PC到机器人运行程序有两种不同的方法:
1.在机器人运行在RoboDK(在线编程)中逐步反馈:
该方法使用机器人作为服务器,每条指令在模拟器中执行时,会一步一步地发送给机器人。此方法对于调试目的很有用。
一个。右键单击程序(在本例中是Print3D)
b。选择在机器人运行
c。双击程序以启动它(或右键单击并选择Run)
一旦选中这个选项,每当我们双击一个程序(或右键单击,然后选择),它就会连接到真正的机器人运行)
这些操作也可从RoboDK API它还允许机器人编程与其他应用程序集成。该API可在Python、c#和其他编程语言中使用。
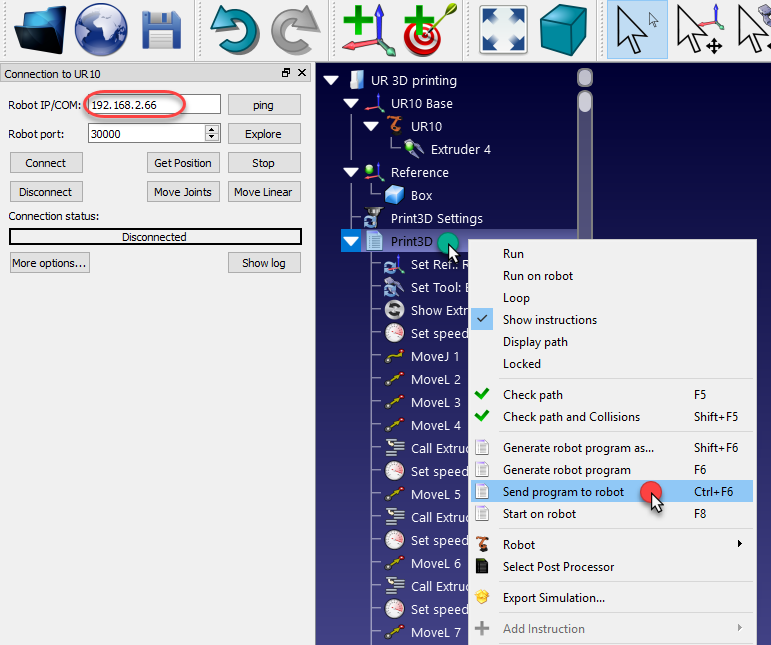
2.向机器人发送程序生成完整的程序,传递给机器人,并在真正的机器人上启动程序(机器人离线编程):2022世界杯8强赛时间
一个。右键单击程序(在本例中是Print3D)
b。选择向机器人发送程序(Ctrl+F6).
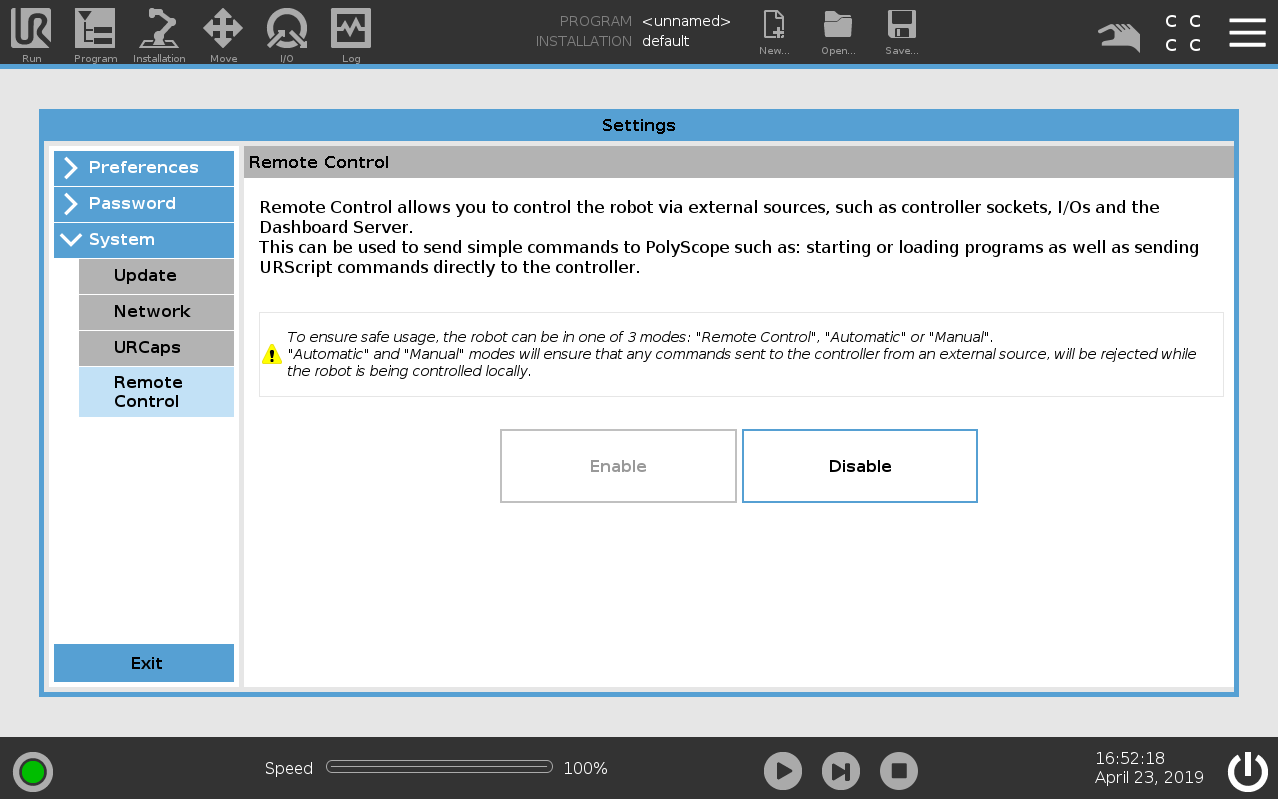
您应该启用远程控制如果你有一个UR机器人(UR3e, UR5e或UR10e),在UR机器人控制器上的选项。
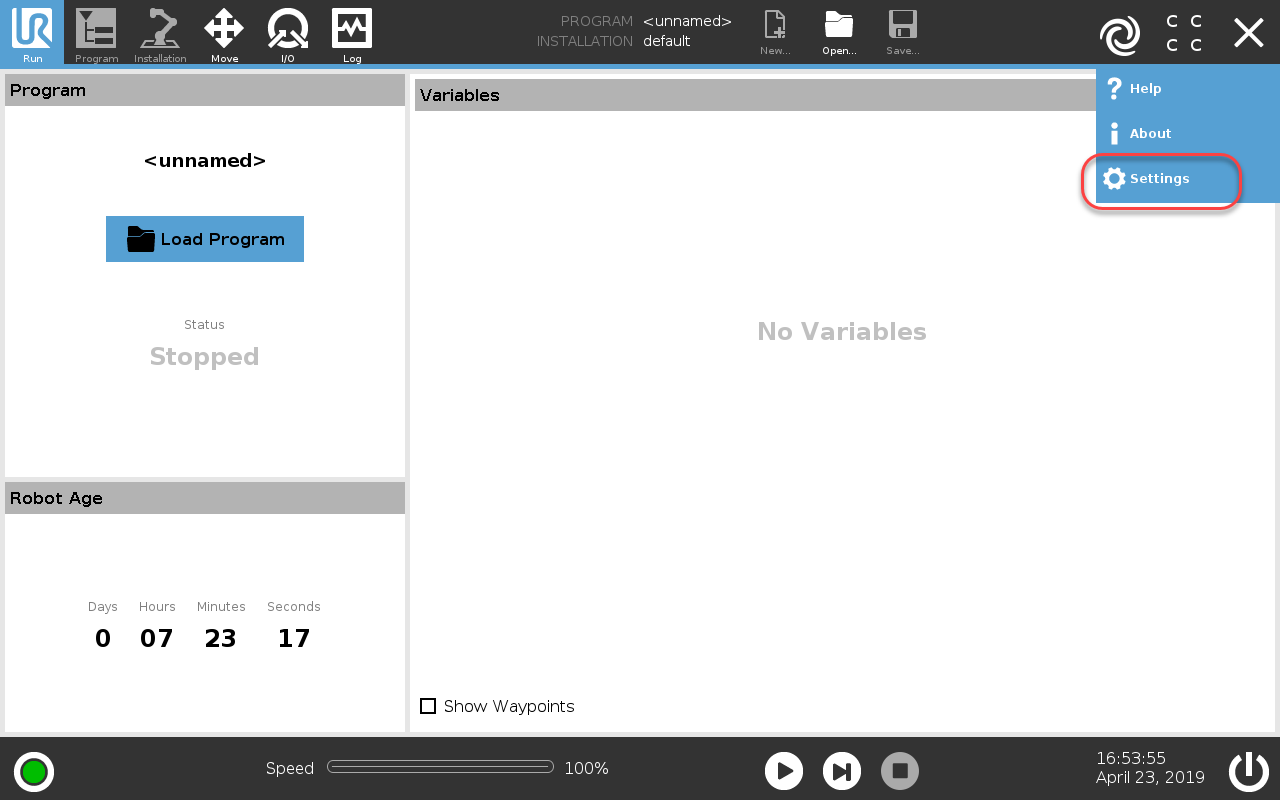
按照以下步骤启用URe的远程控制:
1.选择设置菜单从右上角按钮
2.选择系统远程控制
3.选择启用
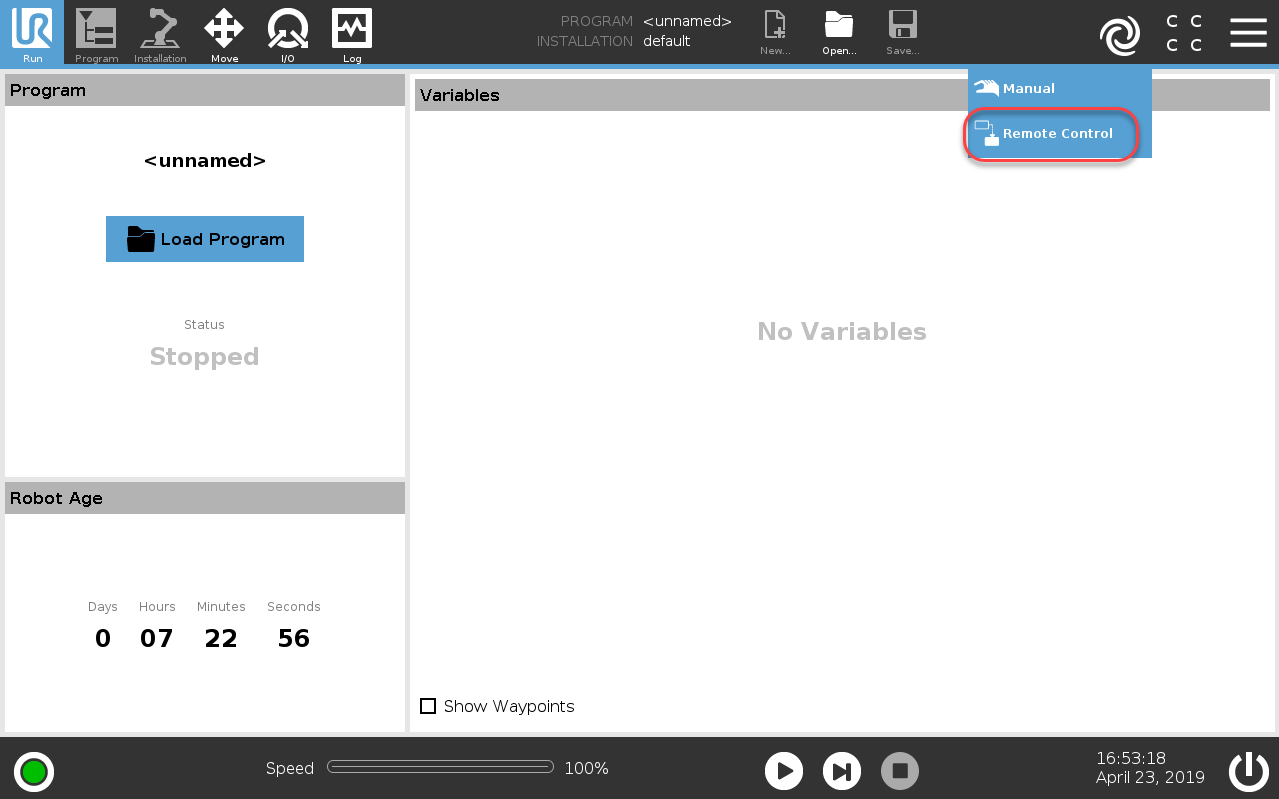
4.将操作模式更改为“远程控制”
库中有一个宏可以让你监视一个UR机器人的状态,并更新真实机器人在RoboDK中的位置。
1.选择文件➔开放
2.加载宏UR_ActivateMonitoring.py来自:C: / RoboDK /图书馆/宏/。我们将在站点中添加一个新的Python对象。
3.确保在机器人连接参数中正确提供机器人的IP。
4.双击宏以开始监视。
模拟器将更新机器人的位置,并在真正的机器人移动时创建目标。除此之外,它还可以监测机器人的速度、加速度和电机电流。
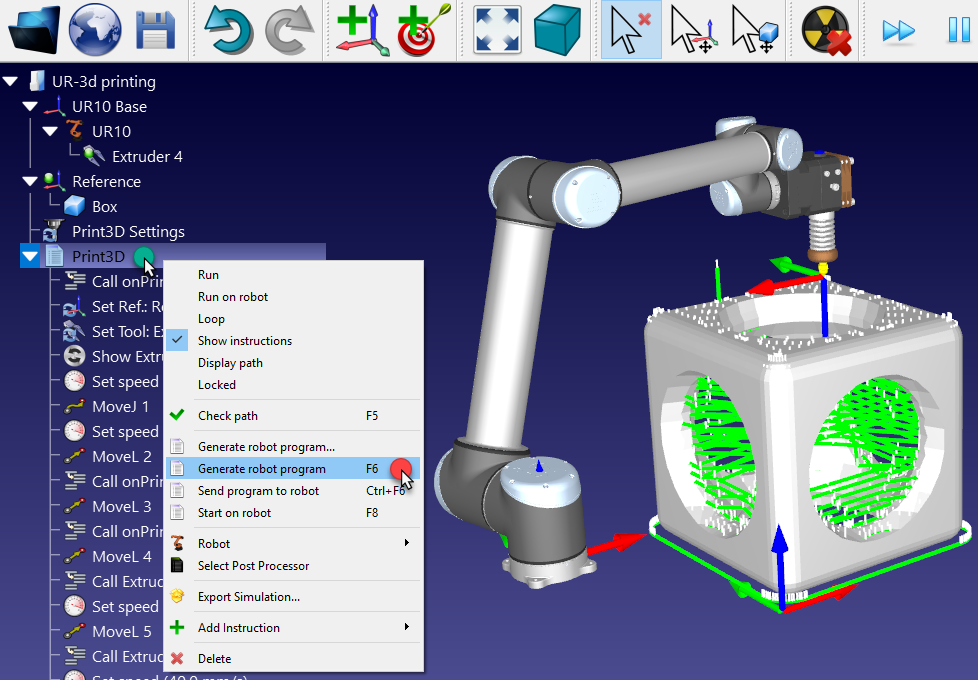
一旦你的RoboDK模拟准备好,你可以生成一个SCRIPT和/或一个URP程序。这两个文件可以由机器人控制器执行。按照以下步骤从机器人模拟中生成SCRIPT和URP程序:
1.右键单击一个程序(在本例中是Print3D)
2.选择生成机器人程序F6
程序将显示在文本编辑器中(这种行为可以在菜单中更改:工具➔选项➔程序)。
传输脚本和URP文件可以通过SFTP传输或USB驱动器完成。
下面的步骤总结了在Universal Robots机器人上加载URP文件的过程。
1.右键单击程序并选择选择后置处理程序
2.选择通用机器人URP
前两个步骤是可选的,因为默认的post也会生成一个URP文件,但是,它将允许您生成一个用户可读的URP程序,而不是一个执行脚本文件的URP程序。
3.右键单击程序并选择生成机器人程序(F6)
4.将生成的URP文件保存到u盘。
5.连接u盘到机器人教学挂件(UR的Polyscope)
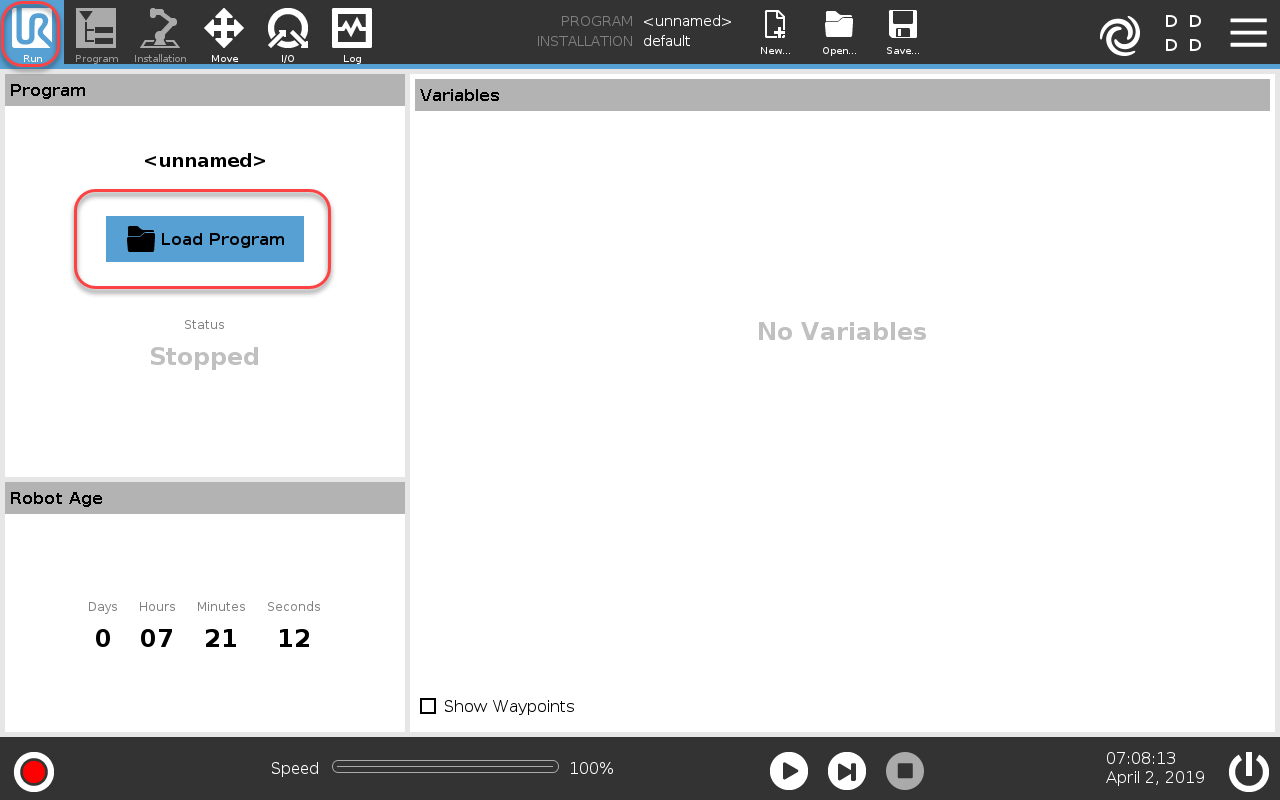
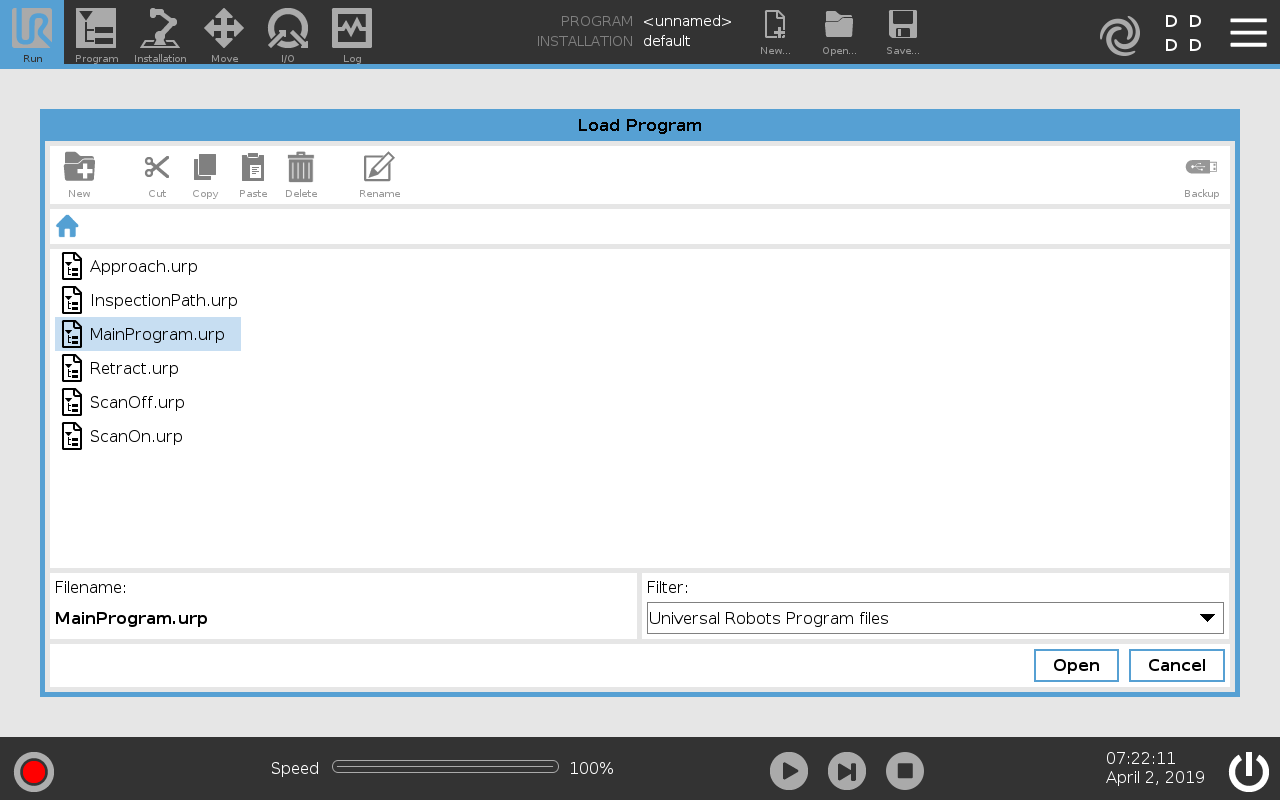
6.在机器人教学挂件上:选择运行选项卡
7.选择加载程序加载从RoboDK生成的程序
8.选择Program选项卡并选择玩按钮启动它
9.选择Play按钮启动程序。
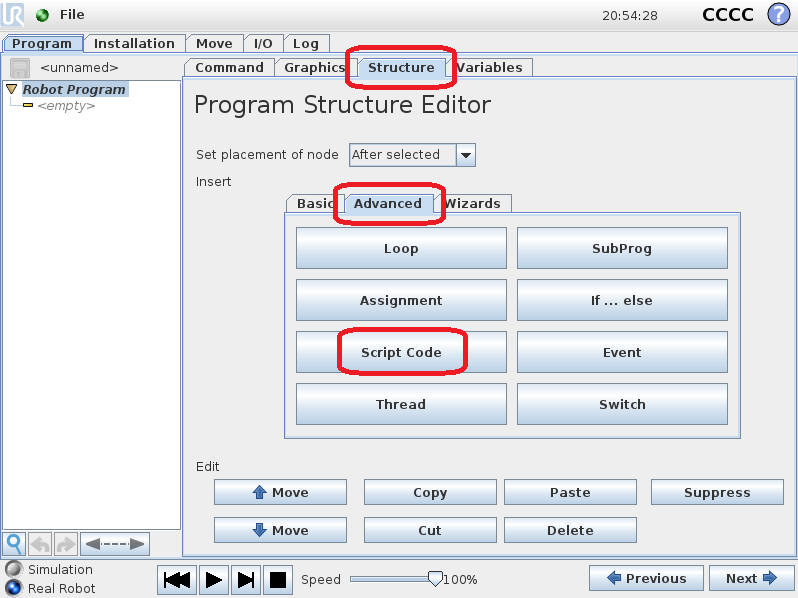
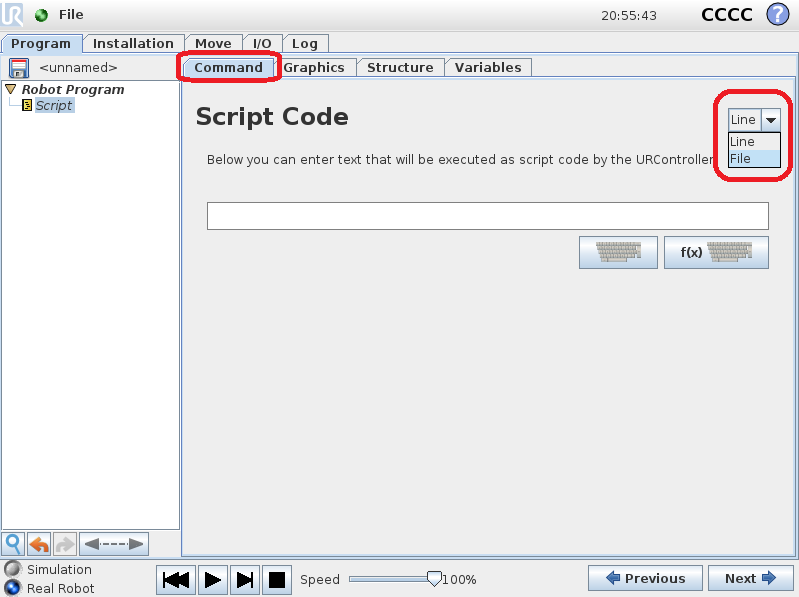
下面的步骤和图像总结了在机器人上执行SCRIPT程序的过程。运行URP程序文件不需要这些步骤:
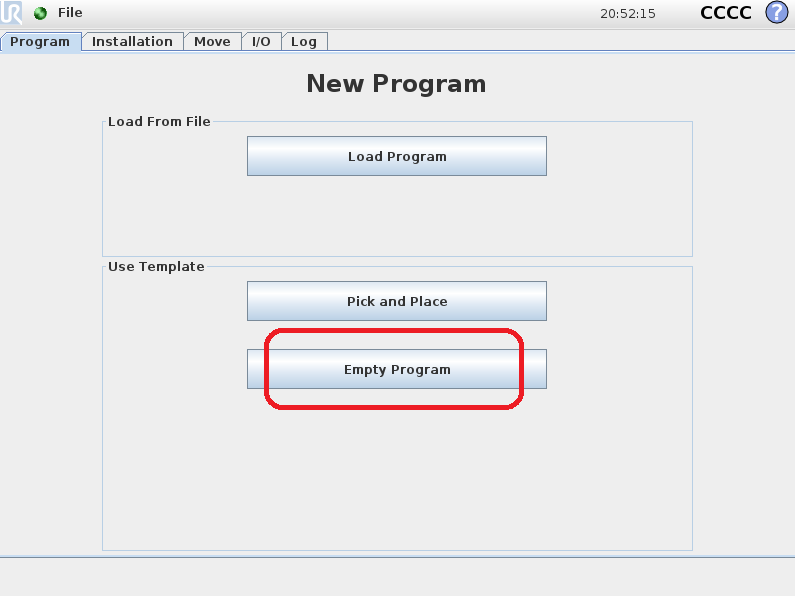
1.选择程序的机器人在主屏幕上的教学挂件
2.选择空项目
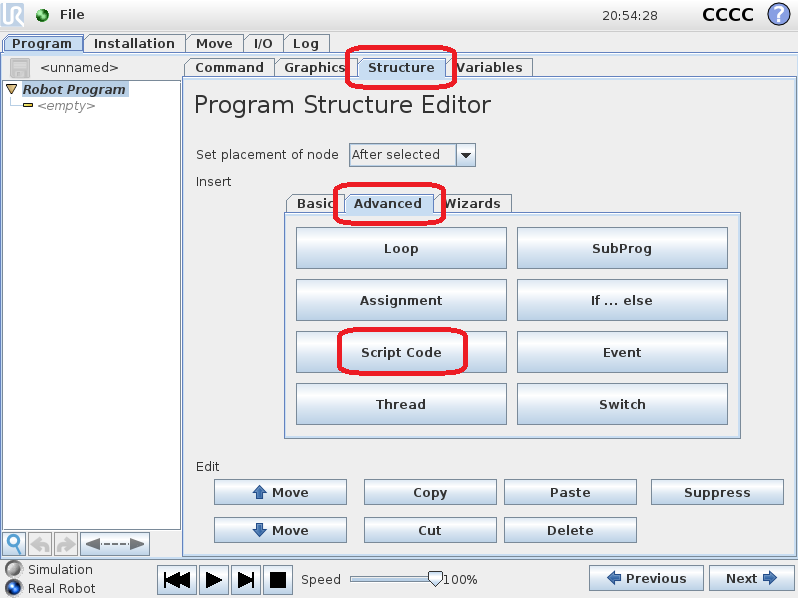
3.选择结构选项卡
4.选择先进的选项卡
5.选择脚本代码
6.选择文件(如图所示)
7.选择RoboDK生成的脚本文件
8.选择播放图标以运行程序
9.选择文件➔保存以保存更改
10.最后,可以执行程序
从RoboDK生成的SCRIPT程序(如按F6)可以通过u盘或通过FTP传输传输到机器人,如果机器人和计算机连接。
建议安装FileZilla客户在默认路径或直接在RoboDK安装文件夹内,以便RoboDK自动检测:
C: \ RoboDK \ FileZilla FTP客户端\
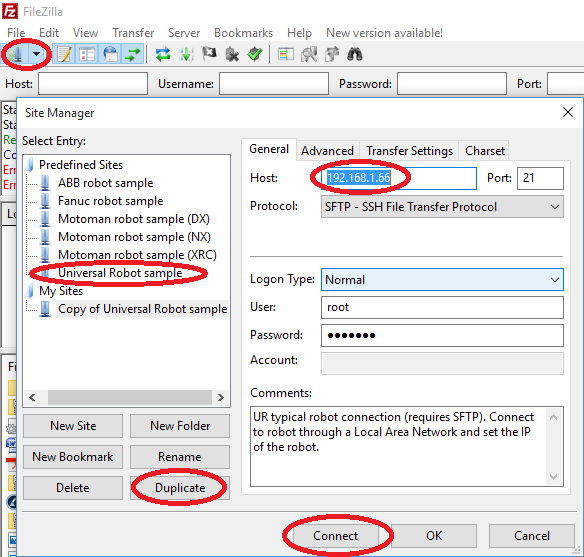
使用实例通过FTP传输文件。
1.右键单击机器人
2.选择连接到机器人……
3.选择探索.FileZilla Client打开(FTP传输软件)。
4.选择文件➔网站管理员……
5.选择通用机器人样本,在预定义的网站.
6.选择重复的.将创建Universal Robot设置的副本。
7.输入机器人的IP(本例中为192.168.1.66)。
8.选择连接.
9.将之前生成的SCRIPT文件传输到机器人。
SCRIPT程序通常存放在机器人控制器的/ programs /文件夹中。
本节中的步骤是可选的,只有在离线编程需要准确性的特定情况下才需要执行。2022世界杯8强赛时间本节解释如何在RoboDK中输入你的机器人的唯一运动学值,以准确模拟机器人。
UR控制器的运动学对于每个机器人都是独特的。运动学是以DH表的形式定义机器人的尺寸(Denavit Hartenberg)。RoboDK模拟器默认使用标称的UR运动学,因此,您可能会看到模拟器运动学和控制器运动学之间的差异从2毫米到10毫米。
为了使模拟与真实的机器人完全匹配,您可以通过简单地打开用teach吊坠创建的URP文件来导入您的UR机器人特定的运动学。
您也可以按以下步骤手动加载URP文件:
1.检索使用真实机器人生成的URP文件(不使用RoboDK或UR模拟器)
2.在RoboDK中打开你的机器人。你可以在RoboDK图书馆找到你的机器人。你也可以在现有的RoboDK站点中使用UR机器人。
3.选择工具涉及脚本
4.选择UR_LoadControllerKinematics
5.选择从机器人控制器提取的URP文件。
您应该会看到如下图所示的消息。如果您没有加载有效的URP文件或您没有选择正确的UR机器人,您可能会看到警告消息。
当这个过程完成后,您可以右键单击机器人并选择另存为.robot.这些参数与robot文件一起保存,您可以使用robot文件,而不必为每个新项目重复此过程。
RoboDK从URP文件中提取特定于机器人的信息,并将其考虑到机器人文件中的模拟和离线编程。2022世界杯8强赛时间您可以更改此设置,并在机器人参数菜单中恢复到默认的运动学,如下图所示。
您会注意到teach pendant中显示的Pose信息与RoboDK中显示的运动学信息相匹配(请确保您删除了RoboDK和UR机器人上的工具框架和参考框架来进行比较)。
由于每个机器人在工厂里都由UR校准,所以UR的运动学从一个机器人改变到另一个机器人。其他机器人供应商如KUKA, ABB, Motoman或发那科不校准他们的机器人,除非你购买所谓的绝对精度选择。绝对精度选项可以考虑多达40个校准参数或更多。
这个程序和RoboDK的机器人校准.机器人标定有助于提高真实机器人的精度。