通用的机器人
一旦你的RoboDK模拟准备好了,你就可以生成一个SCRIPT和/或URP程序。这两个文件可以由机器人控制器执行。按照以下步骤从你的机器人模拟中生成一个SCRIPT和URP程序:
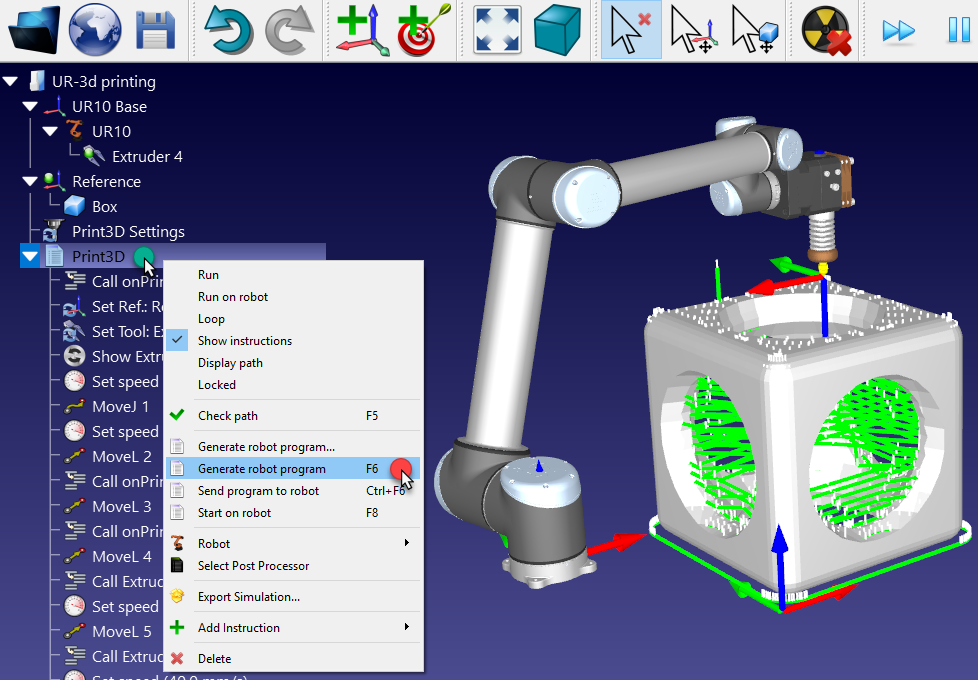
1.右键单击一个程序(本例中为Print3D)
2.选择生成机器人程序F6
程序将显示在文本编辑器中(此行为可以在菜单中更改:工具➔选项➔程序).
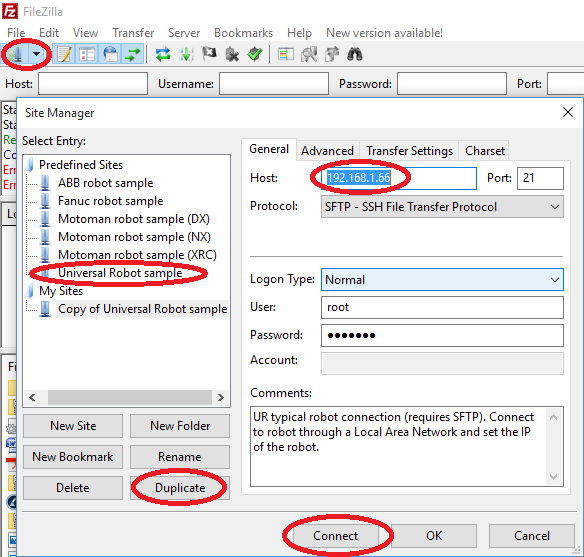
脚本和URP文件的传输可以通过SFTP传输或u盘进行。
以下步骤总结了在Universal Robots机器人上加载URP文件的过程。
1.右键单击程序并选择选择后处理器
2.选择万能机器人URP
前两个步骤是可选的,因为默认post也会生成一个URP文件,但是,它将允许您生成一个用户可读的URP程序,而不是一个执行脚本文件的URP程序。
3.右键单击程序并选择生成机器人程序(F6)
4.将生成的URP文件保存到u盘。
5.将u盘连接到机器人教学挂件(UR’s Polyscope)
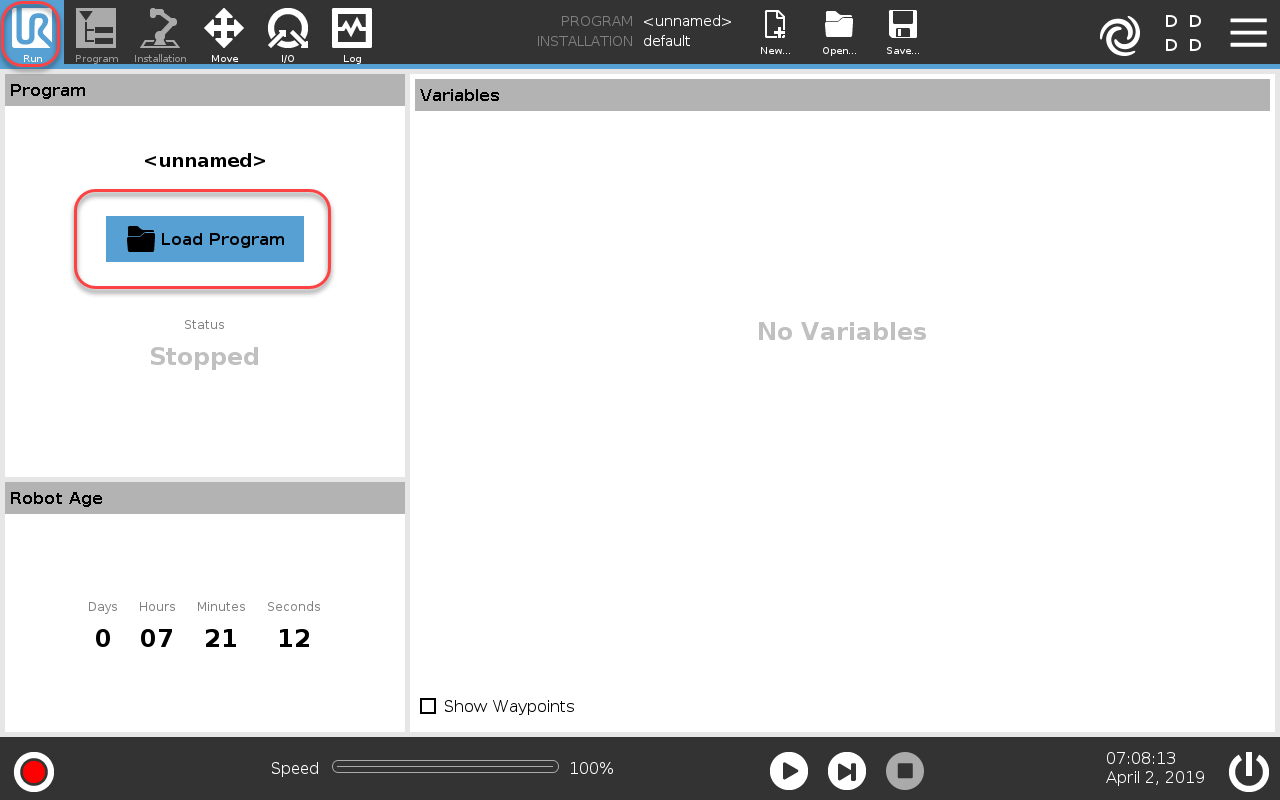
6.关于机器人教学挂件:选择运行选项卡
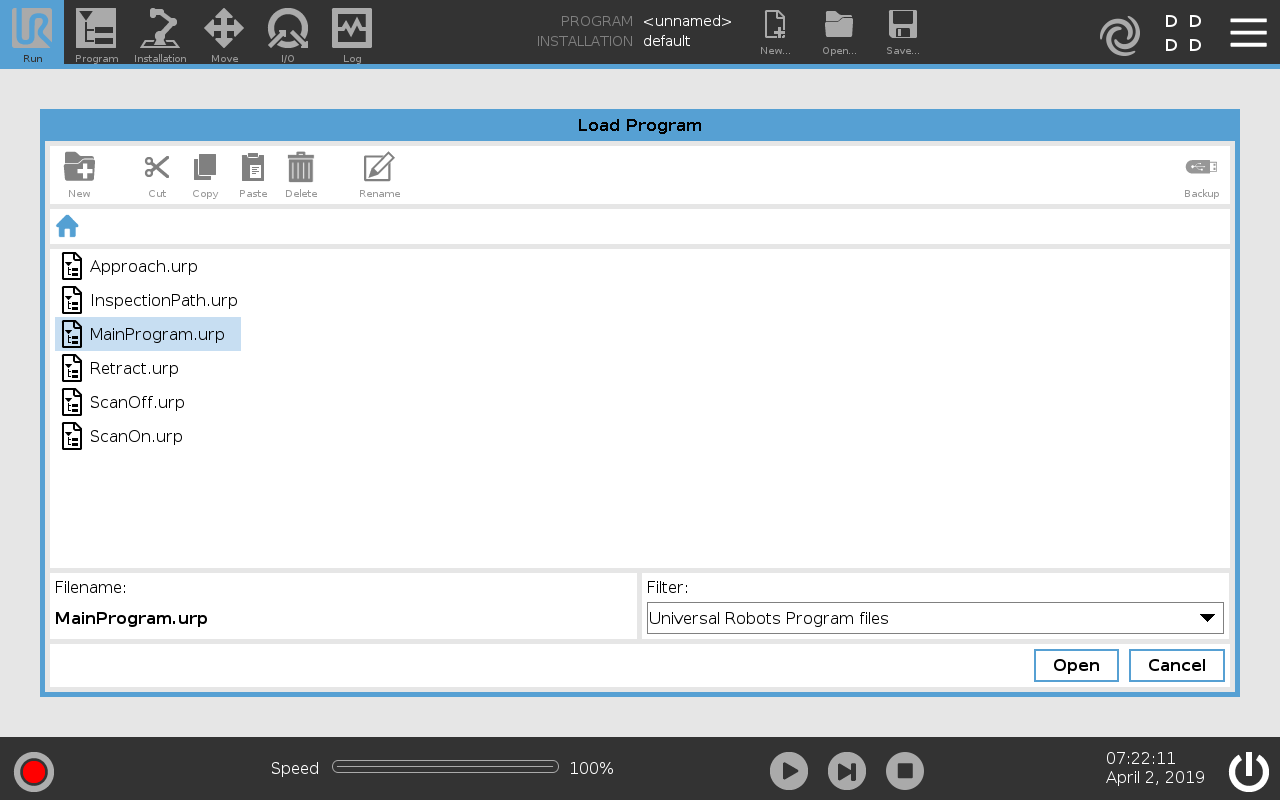
7.选择加载程序加载RoboDK生成的程序
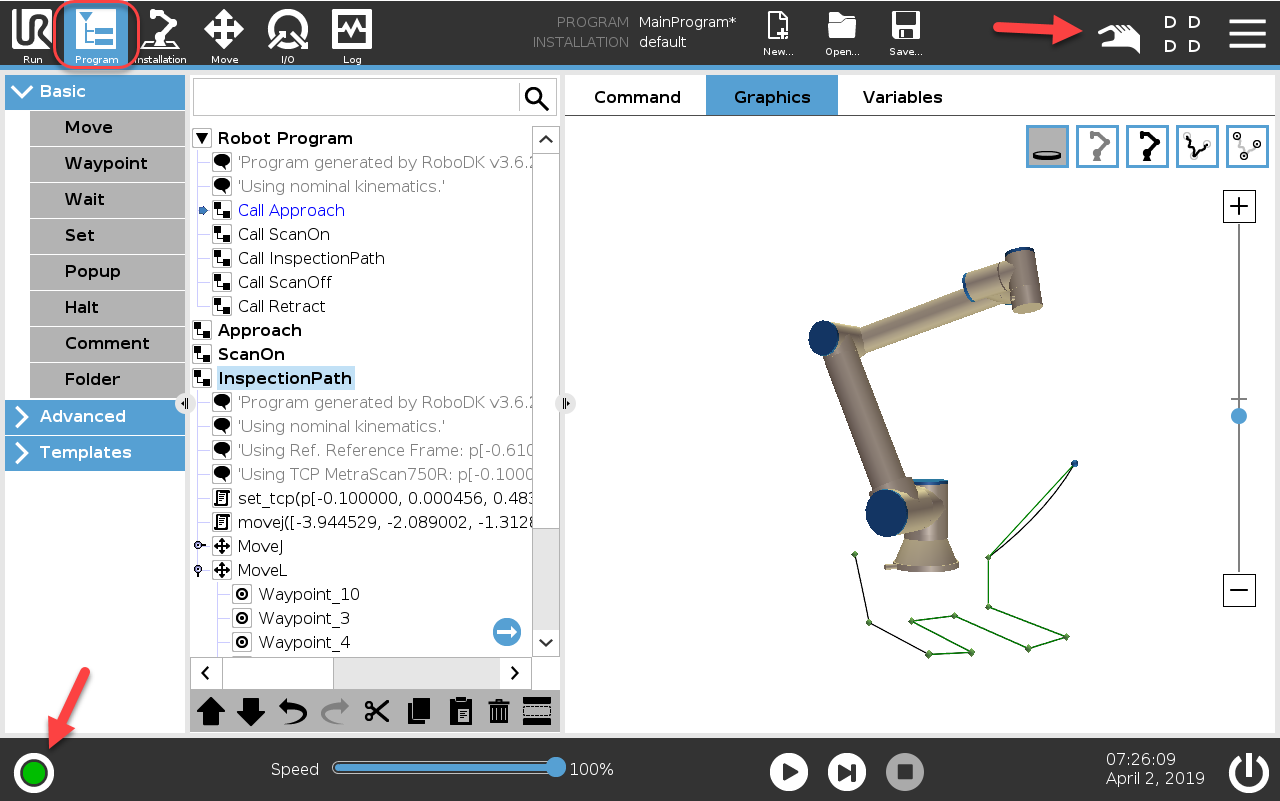
8.选择Program选项卡并选择玩按钮启动。
9.选择Play按钮来启动程序。
下面的步骤和图像总结了在机器人上执行SCRIPT程序的过程。运行URP程序文件不需要以下步骤:
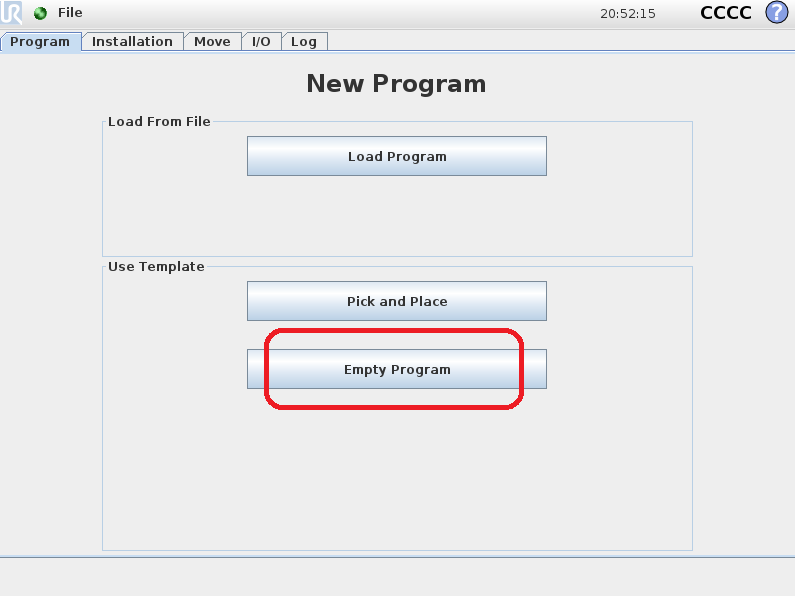
1.选择程序的机器人在教学挂件的主屏幕上
2.选择空项目
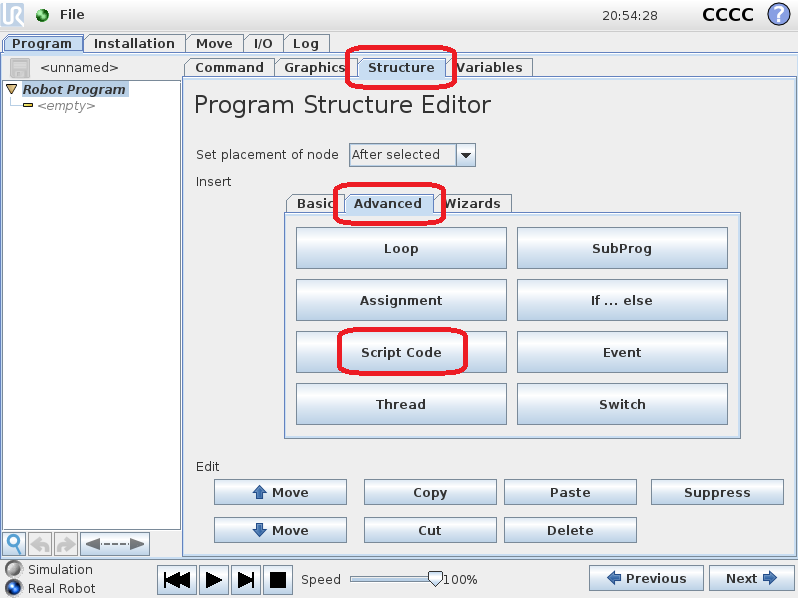
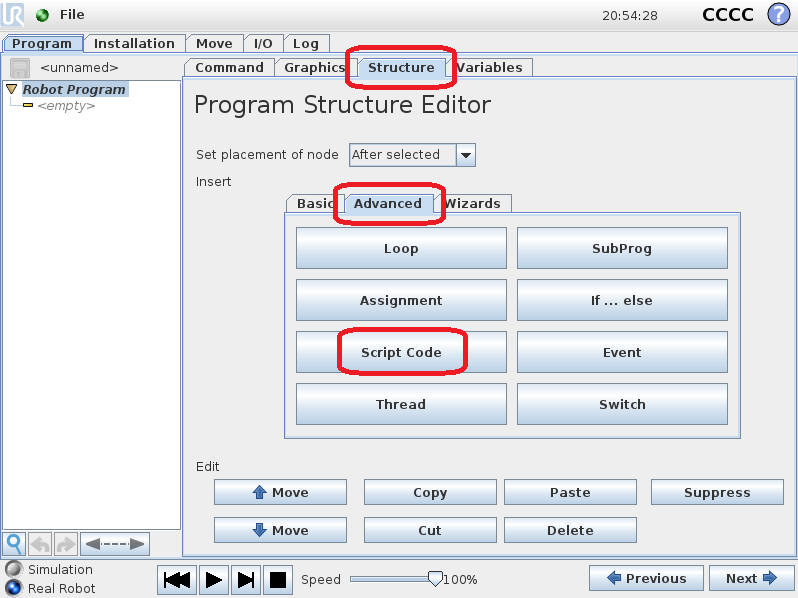
3.选择结构选项卡
4.选择先进的选项卡
5.选择脚本代码
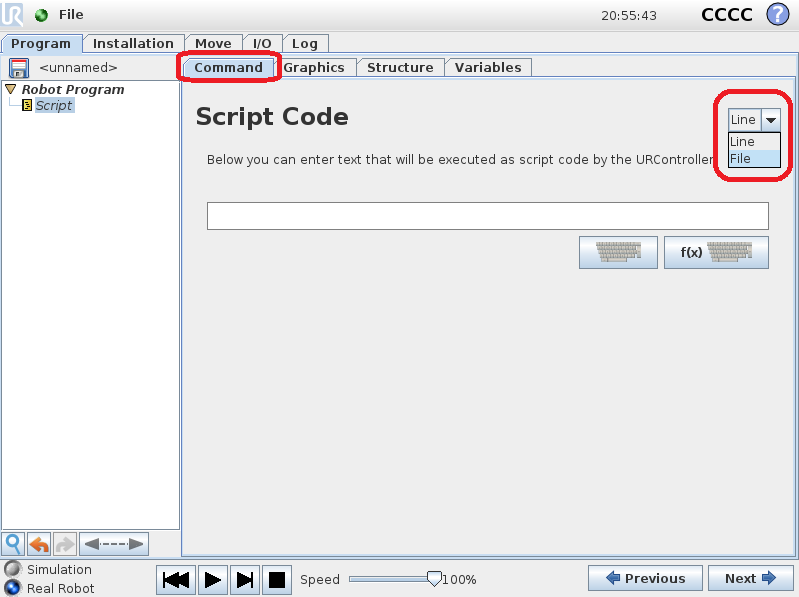
6.选择文件(如图所示)
7.选择RoboDK生成的脚本文件
8.选择播放图标来运行程序
9.选择文件➔保存以保存更改
10.最后,程序可以执行