通用的机器人
机器人驱动程序提供了离线编程(生成程序,然后传输到机器人并执行)的另一种选择。2022世界杯8强赛时间您可以直接在机器人上运行RoboDK的模拟(在线编程)。更多信息请参见机器人司机部分。
按照以下步骤连接RoboDK的机器人:
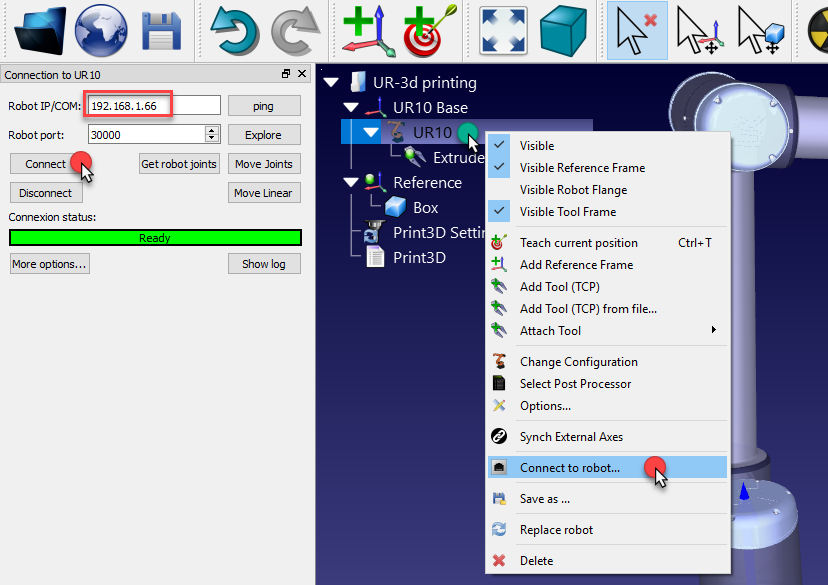
1.右键单击RoboDK中的机器人
2.选择:![]() 连接到机器人…
连接到机器人…
3.输入机器人的IP
4.选择连接。
应该有绿色的信息显示准备好了如果连接成功。
机器人可以通过选择来移动获得机器人关节,移动关节和线性移动,从连接菜单中。
从PC到机器人运行程序有两种不同的方法:
1.在机器人上运行一步一步的反馈在RoboDK(在线编程):
该方法将机器人作为服务器,每条指令在模拟器中执行时一步一步地发送给机器人。这个方法对于调试很有用。
一个。右键单击程序(本例中为Print3D)
b。选择在机器人上运行
c。双击程序以启动它(或右键单击并选择运行)
一旦这个选项被选中,它将连接到真正的机器人每次我们双击一个程序(或右键单击,然后选择)运行)
控件中也可以获得这些操作RoboDK API它还允许将机器人编程与其他应用程序集成。该API支持Python、c#和其他编程语言。
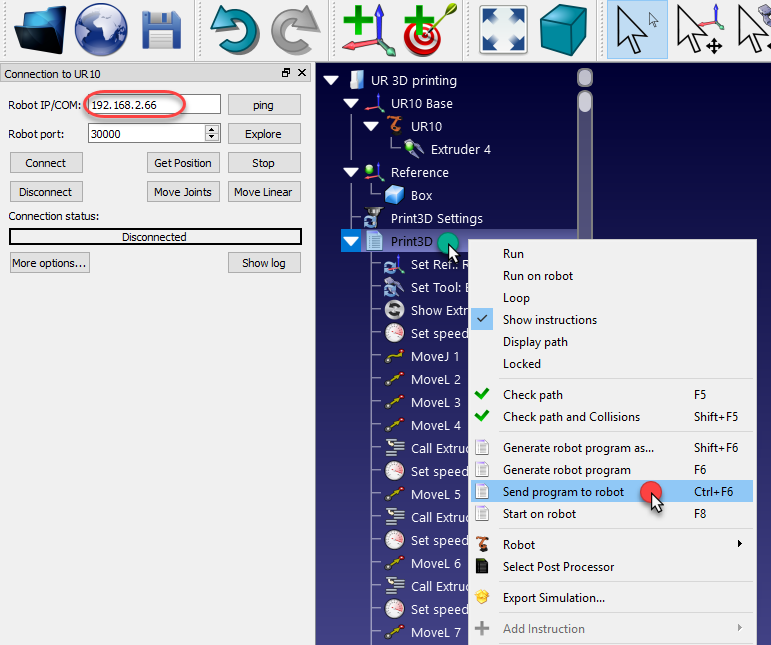
2.向机器人发送程序生成完整的程序,传递给机器人,并在真正的机器人上启动程序(机器人离线编程):2022世界杯8强赛时间
一个。右键单击程序(本例中为Print3D)
b。选择发送程序给机器人(Ctrl+F6)。
您应该启用远程控制如果您有一个UR机器人(UR3e, UR5e或UR10e),请在UR机器人控制器上选择。
按照以下步骤启用URe的远程控制:
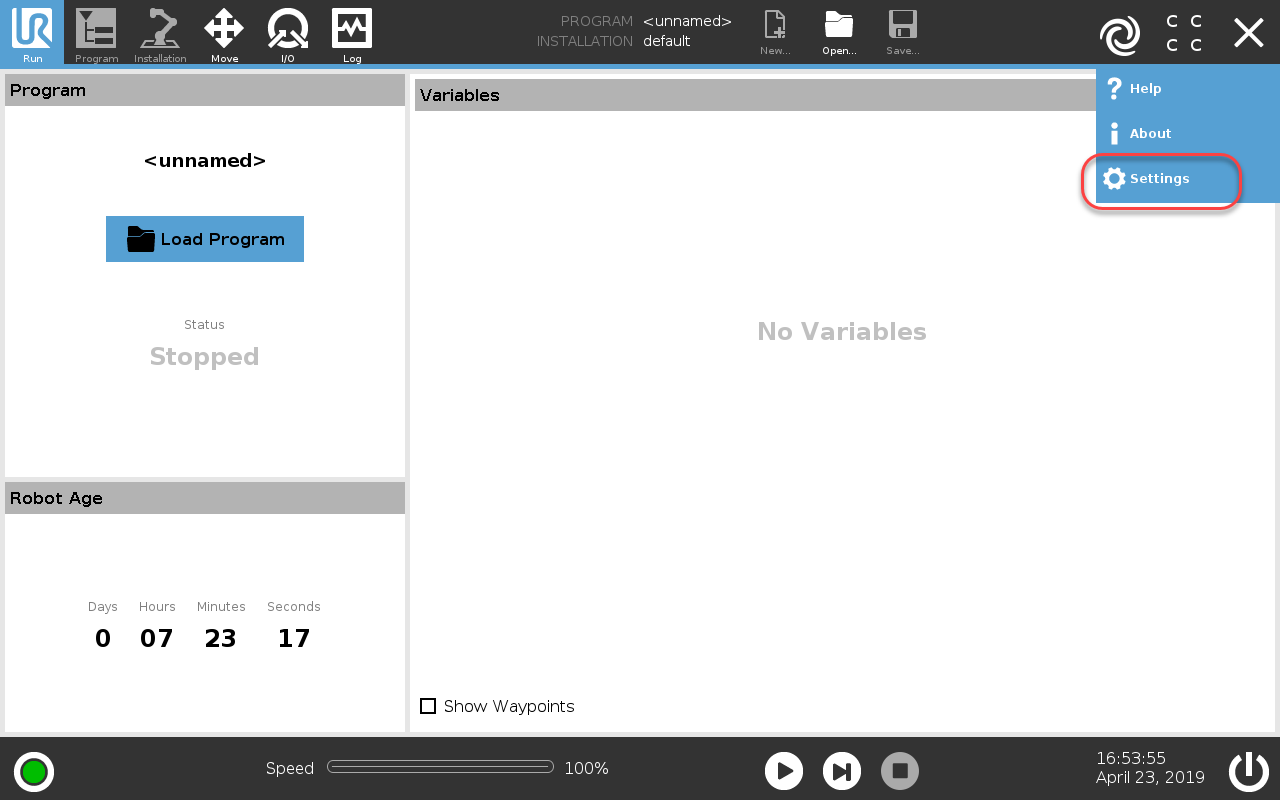
1.选择设置菜单从右上方按钮
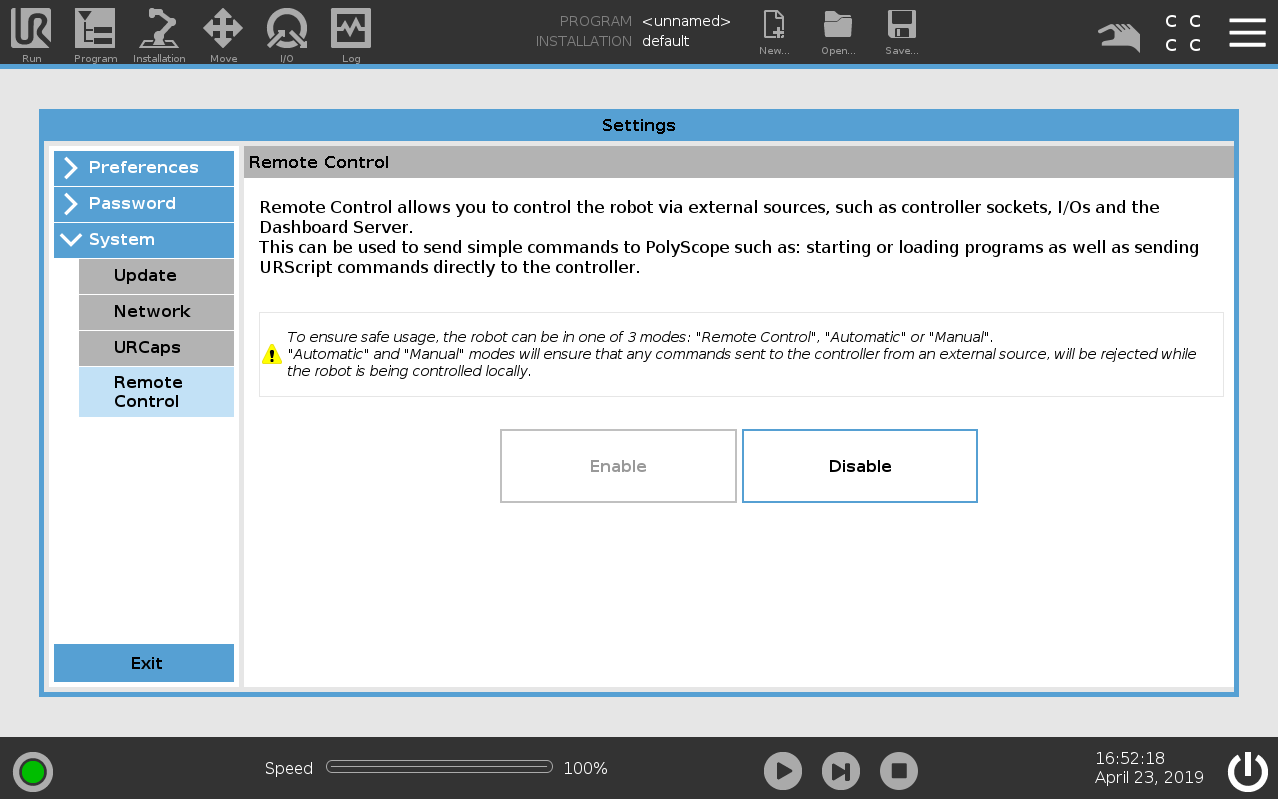
2.选择系统远程控制
3.选择启用
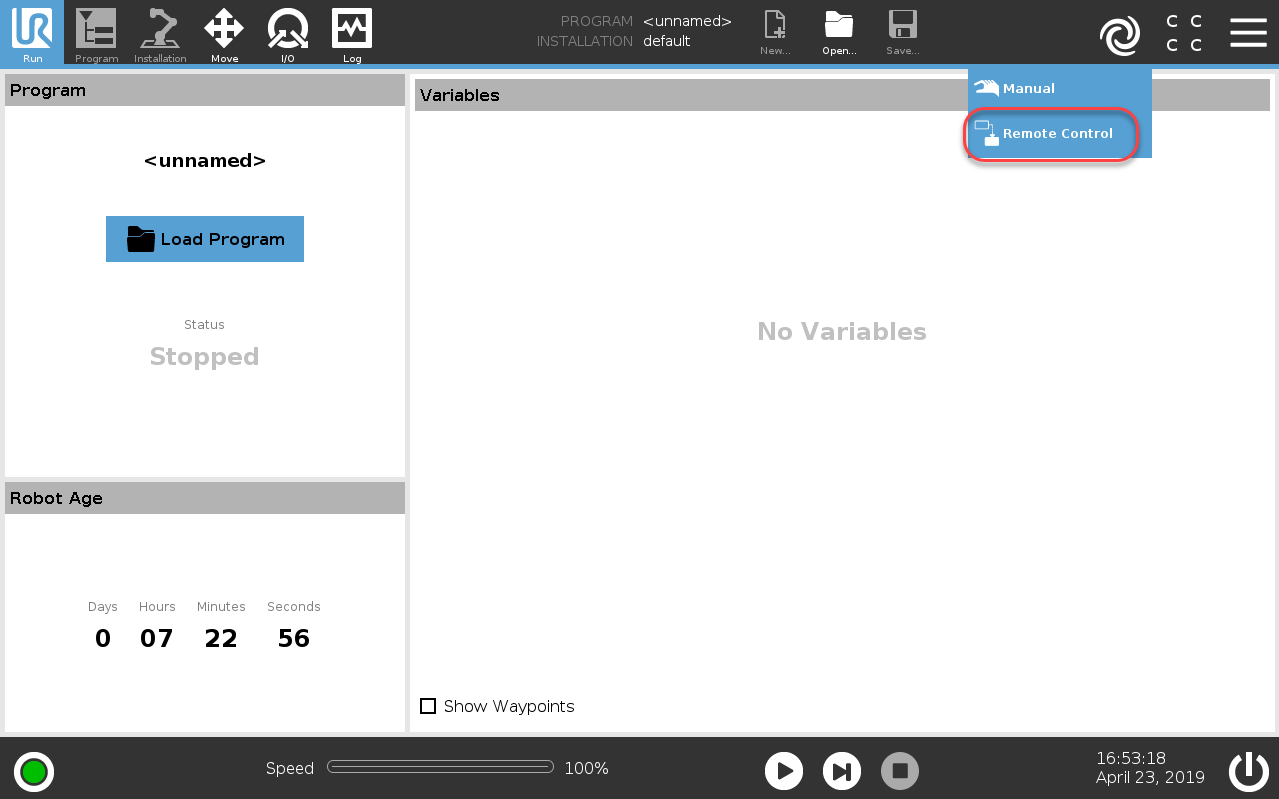
4.将操作模式更改为远程控制