Mecademic
您可以使用三种不同的方法为mechantic机器人编程:使用运行在mechantic控制器上的mechantic脚本文件、使用外部运行的PY文件或使用RoboDK驱动程序。
1.脚本文件:您可以使用RoboDK生成可加载到机电控制器上的脚本。这是通过使用用于mechandic机器人的默认后处理器来完成的。您可以直接复制的脚本程序使用Mecademic的web界面。
2.PY文件:生成一个Python文件,通过Mecademic的TCP接口自动连接到机器人,并远程运行该程序。您应该选择名为mechandic Python的后处理器。
3.在线编程: RoboDK可以将你的程序作为离线程序(最多500)上传到机器人的内存中。可以从任何其他方法调用这些脱机程序。
使用RoboDK,您可以生成离线程序,脚本文件和PY文件,可以由一个机械机器人执行。此外,如果机器人连接到计算机,还可以从RoboDK在机器人上执行程序。
你需要你的机械机器人的IP来运行或从RoboDK传输程序。机械机器人的IP地址默认为192.168.0.100。您可以通过在浏览器中输入机器人的IP来访问web界面,以确定机器人的IP是否正确。
如果你无法看到如下图所示的机器人web界面,请确保正确设置网络连接。

一旦你的RoboDK模拟准备好了,你就可以离线生成一个程序,这个程序可以由机械机器人控制器(脚本文件)执行。您还可以生成一个PY文件,该文件将从远程计算机上运行机器人控制器上的程序。
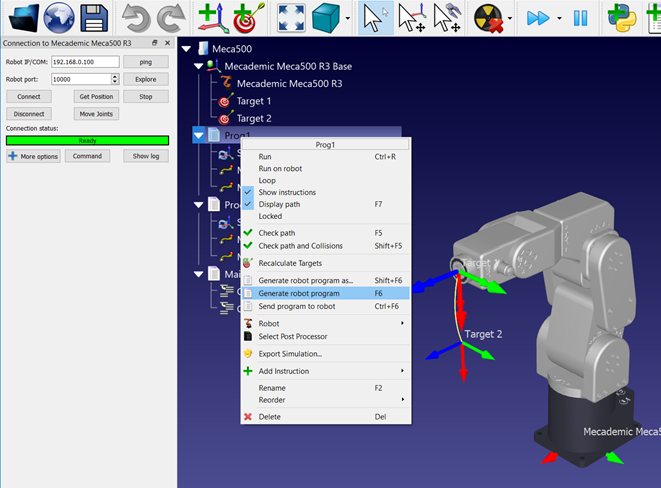
按照以下步骤从机器人模拟中生成一个脱机程序(脚本或PY文件):
1.右键单击一个程序(在本例中是Prog1)
2.选择生成机器人程序F6
程序将显示在文本编辑器中(这种行为可以在菜单中更改:工具➔选项➔程序).
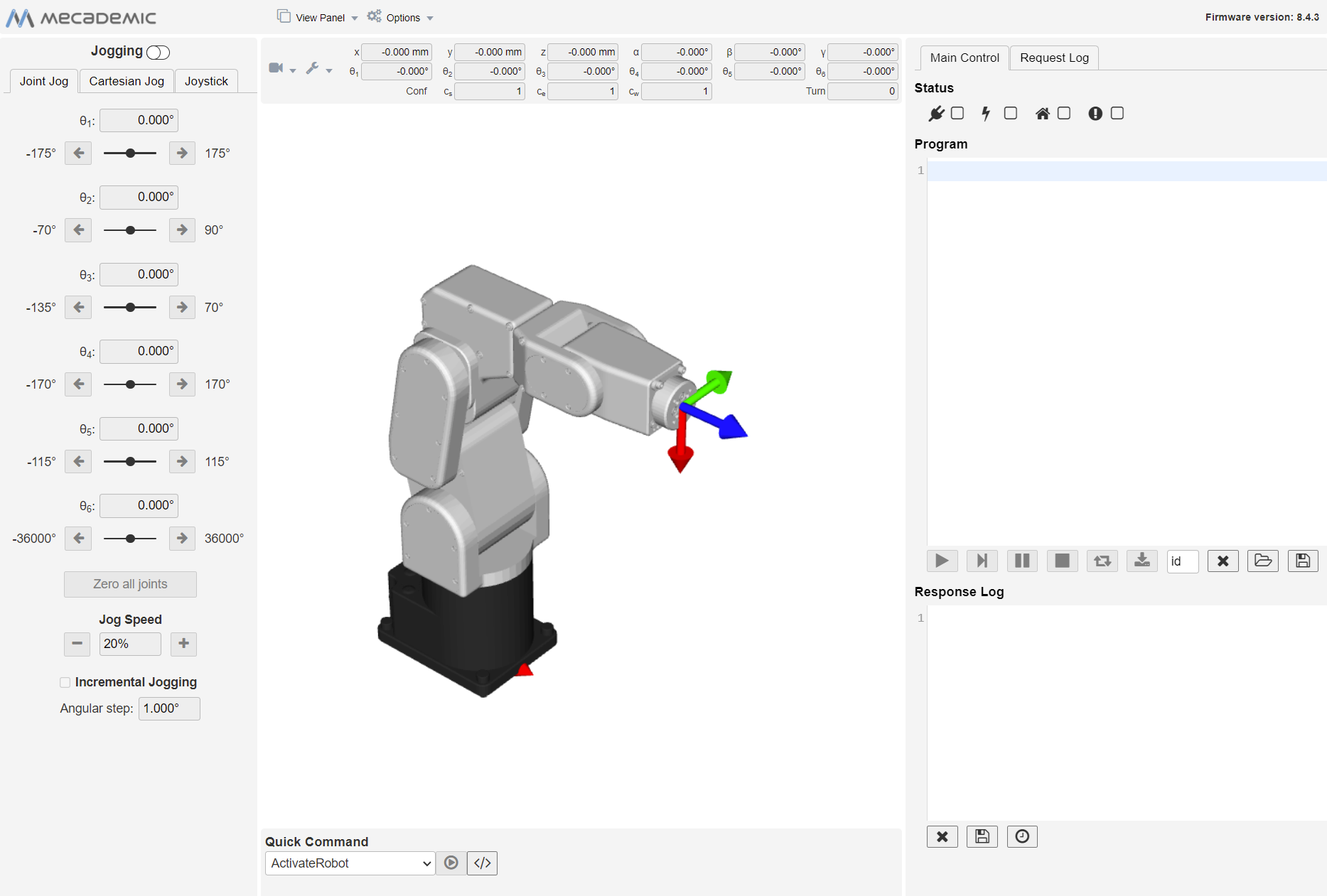
一旦你获得了一个程序/脚本文件,你可以运行该程序或在控制器上使用web界面加载它。按照以下步骤使用Mecademic web界面运行程序:
1.在你的网页浏览器上打开机械人网页界面(输入机器人的IP地址)。
2.将脚本内容复制并粘贴到程序编辑器。
3.在状态酒吧,连接,激活而且首页你的机器人。
4.点击玩按钮来运行程序。
5.点击保存按钮,将程序上传到机器人。
您可以生成一个Python文件,该文件使用Mecademic的TCP/IP接口自动连接到Mecademic机器人,并远程运行该程序。
您应该选择名为mechandic Python的后处理器。下面的步骤总结了在mecdemic上运行PY文件的过程。
1.右键单击程序并选择选择后置处理程序
2.选择Mecademic Python
3.右键单击程序并选择生成机器人程序(F6)
4.将生成的PY文件保存到磁盘上。
5.在IDE中打开并运行PY文件,或者直接从python环境中运行它。
机器人驱动程序提供了离线编程(生成程序,然后将程序传输给机器人并执行)的替代方案2022世界杯8强赛时间。你可以从RoboDK直接在机器人上运行模拟(在线编程)。更多信息,请参阅机器人司机部分。
按照以下步骤连接到RoboDK中的机器人:
1.右键单击RoboDK中的机器人
2.选择:![]() 连接到机器人……
连接到机器人……
3.输入机器人的IP
4.选择连接.
应该显示一条绿色消息准备好了如果连接成功。
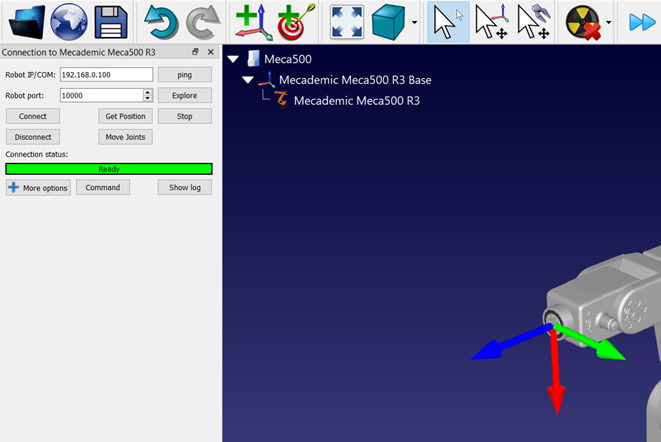
机器人可通过选择进行移动得到机器人关节,移动关节,从连接菜单。
从PC到机器人运行程序有两种不同的方法:
1.在机器人运行在RoboDK(在线编程)中逐步反馈:
该方法使用机器人作为服务器,每条指令在模拟器中执行时,会一步一步地发送给机器人。此方法对于调试目的很有用。
一个。右键单击程序(在本例中是Print3D)
b。选择在机器人运行
c。双击程序以启动它(或右键单击并选择Run)
一旦选中这个选项,每当我们双击一个程序(或右键单击,然后选择),它就会连接到真正的机器人运行)
这些操作也可从RoboDK API它还允许机器人编程与其他应用程序集成。该API可在Python、c#和其他编程语言中使用。

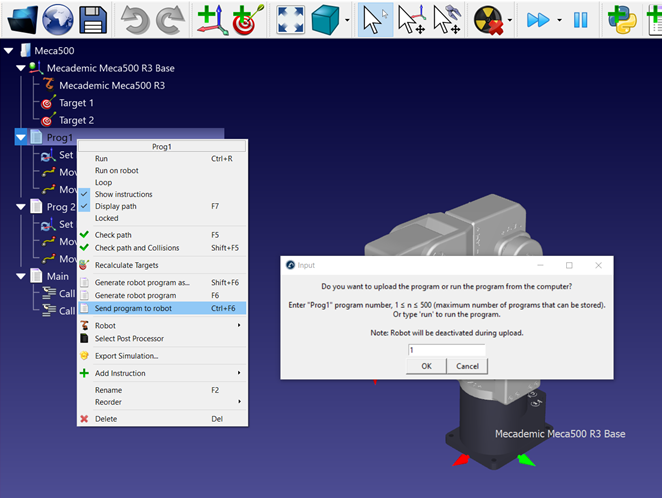
2.向机器人发送程序使用Mecademic后处理器。它通过指定“run”作为程序号,可以用于在机器人上运行程序。完整的程序也可以作为离线程序保存在机器人控制器上(参见机器人离线编程):2022世界杯8强赛时间
一个。右键单击程序(在本例中是Prog1)
b。选择向机器人发送程序(Ctrl+F6).
本节提供编程Meca500机器人时的其他有用信息。
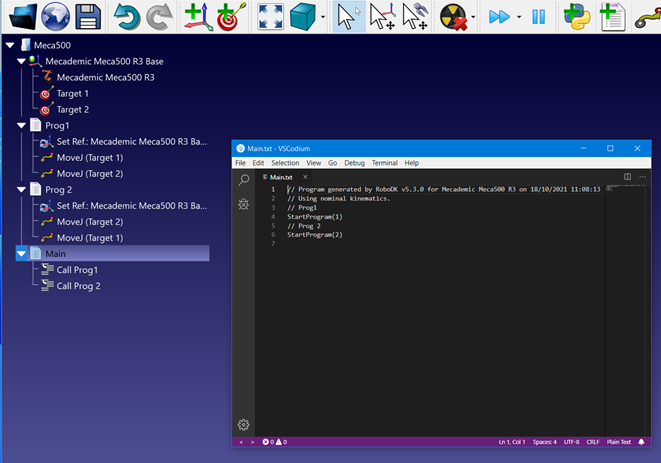
离线程序在机器人上是持久的,可以使用它们各自的程序号调用。通过将程序号添加到程序名中,您可以自动选择程序号。
RoboDK将自动检索ID并使用它调用程序。这也适用于子例程,参见下面的示例。
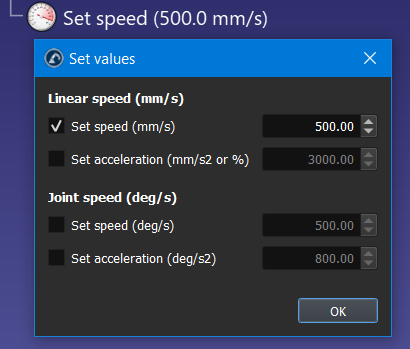
机械机器人的关节速度、线性和关节加速度单位应以百分比值(%)提供,与设定速度指令菜单中显示的其他单位相反。
线速度是正确的,需要提供毫米/秒。