Mecademic
一旦你的RoboDK模拟准备好了,你可以生成一个离线的程序,可以由Mecademic机器人控制器(脚本文件)执行。您还可以生成一个PY文件,该文件将在远程计算机上运行机器人控制器上的程序。
按照以下步骤从机器人模拟生成脱机程序(脚本或PY文件):
1.右键单击程序(本例中为Prog1)
2.选择生成机器人程序F6
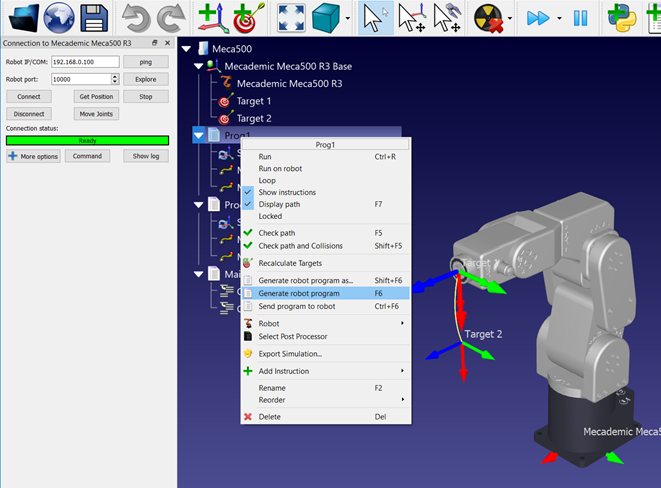
该程序将显示在文本编辑器中(此行为可以在菜单中更改:工具➔选项➔程序)。
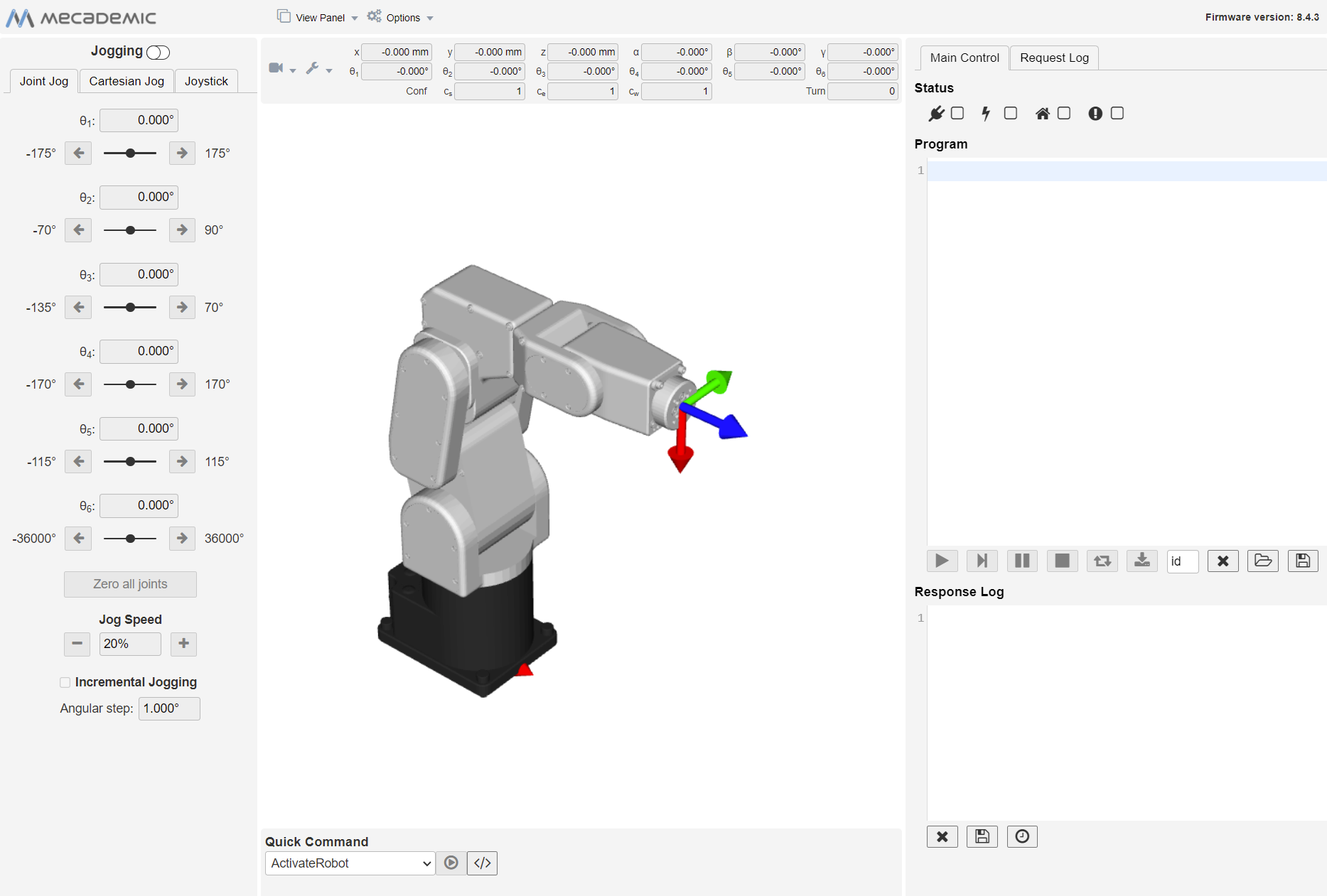
获得程序/脚本文件后,您可以运行程序或使用web界面将其加载到控制器上。按照以下步骤使用学术网络界面运行程序:
1.在浏览器上打开学术网络界面(输入机器人的IP地址)。
2.将脚本内容复制并粘贴到程序编辑器。
3.在状态酒吧,连接,激活和首页你的机器人。
4.点击玩按钮以运行程序。
5.点击保存按钮,将程序上传到机器人。
您可以生成一个Python文件,该文件使用Mecademic TCP/IP接口自动连接到Mecademic机器人,并远程运行该程序。
您应该选择名为学术Python的后处理程序。下面的步骤总结了在学术上运行PY文件的过程。
1.右键单击程序并选择选择后置处理器
2.选择Mecademic Python
3.右键单击程序并选择生成机器人程序(F6)
4.将生成的PY文件保存到磁盘上。
5.在IDE中打开并运行PY文件,或者直接从python环境中运行它。