ABB机器人
ABB机器人的程序可以通过FTP从RoboDK轻松传输:
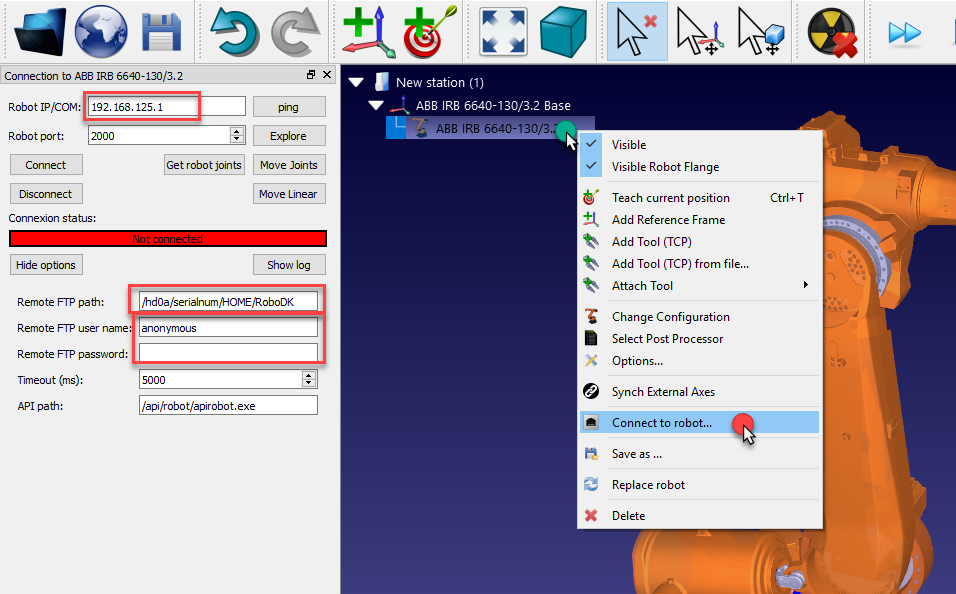
1.右键点击RoboDK中的机器人
2.选择连接到机器人…
3.输入机器人的IP地址
4.输入远程FTP路径。
完整的路径可以从teach挂坠或使用FileZilla FTP Client检索。
5.输入FTP凭据(默认为匿名)
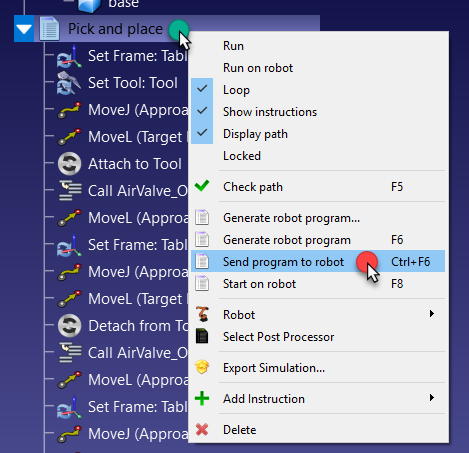
一旦RoboDK程序准备好发送给机器人:
1.右键单击RoboDK中的一个程序
2.选择向机器人发送程序(Ctrl+F6)
这将生成程序并尝试将其传输给机器人控制器。将弹出一个窗口,显示FTP传输是否成功。
当程序通过FTP传输时,需要在机器人端使用RAPID编程来加载它们。下面的例子将从名为MOD_Pick_and_place的模块运行main_RoboDK程序:
模块RoboDK_FTP_Run_Program
!输入具有写访问权限的文件夹的路径。例子:
CONST string PATH_ROBODK:= "/hd0a/robot-serial-num/HOME/RoboDK";
ftp_program_loaded:= ";
PROC Main ()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program ()
Var num module_id:= -1;
WHILE module_id <= 0
TPErase;
TPReadNum module_id, "输入要运行的程序。例如:在Prog2模块中运行Prog2。Mod类型2”;
ENDWHILE
FTP_Run_Program_ID (module_id参数);
ENDPROC
FTP_Run_Program_ID(num module_id)
VAR string path_module:= "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
返回;
ENDIF
path_module:= PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
Mod_to_unload:= ftp_program_loaded;
Ftp_program_loaded:= "";
卸载mod_to_unload;
ENDIF
加载path_module;
Ftp_program_loaded:= path_module;
TPWrite“启动程序:”+ path_module;
!从发送和加载的模块中调用主程序
!% %”main_RoboDK”;
!调用编号的程序(它应该具有相同的效果)
%“掠夺”+ NumToStr (module_id参数,0)%;
TPWrite“程序完成”;
ENDPROC
ENDMODULE