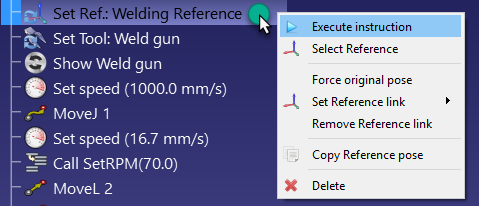
选择程序➔![机器人程序-图9]() 设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
参考系是一个变量,也称为Work Object (ABB机器人)、UFRAME (Fanuc机器人)、frame (Motoman机器人)或$BASE (KUKA机器人)。
![机器人程序-图10]()
注意:
特定控制器支持使用编号参考帧设置参考帧(如Fanuc和Motoman控制器)。在这种情况下,参考系的名称可以以数字结尾(例如框架4设置帧索引4)。