机器人的程序
可以通过右键单击程序或从程序菜单,如前一节所示。
介绍RoboDK图形用户界面支持的机器人离线编程指令。2022世界杯8强赛时间
选择程序➔![]() 移动关节指令增加一个新的关节动作指令。或者,选择工具栏中相应的按钮。
移动关节指令增加一个新的关节动作指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了目标,否则移动指令将创建一个新目标并将它们链接起来。如果目标被移动,那么移动也会被修改。
如果这是添加到程序中的第一条指令,则在移动指令之前将添加两条指令:a参考系选择和一个工具框架选择.这将确保当程序达到运动指令时,机器人使用用于创建新目标的相同参考和工具框架。
选择程序➔![]() 移动线性指令添加一个新的线性运动指令。或者,选择工具栏中相应的按钮。
移动线性指令添加一个新的线性运动指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了目标,否则移动指令将创建一个新目标并将它们链接起来。如果目标被移动,那么移动也会被修改。
关节移动和线性移动的行为方式相同,可以很容易地从一种类型切换到另一种类型。
与关节移动指令相同,如果这是添加到程序中的第一条指令,则在移动指令之前将添加另外两条指令:a参考系选择和一个工具框架选择.
与关节运动相反,线性运动对机器人的奇异性和轴极限敏感。例如,六轴机器人不能在线性移动后穿过奇点。下图显示了一个例子关节5太接近奇点(0度)。考虑联合行动吧.如下图所示。
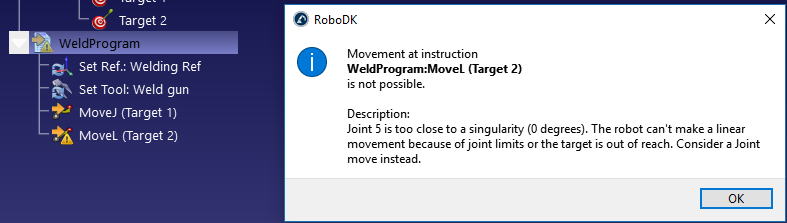
如果线性移动不是严格必要的,右键单击移动指令并将其更改为联合指令。
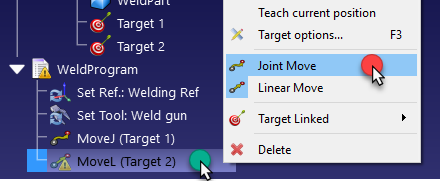
或者,必须修改目标、TCP或参考帧的位置以避免奇点。
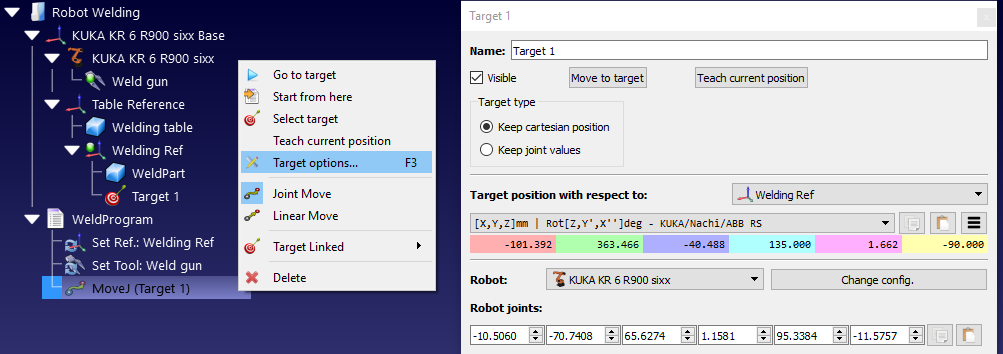
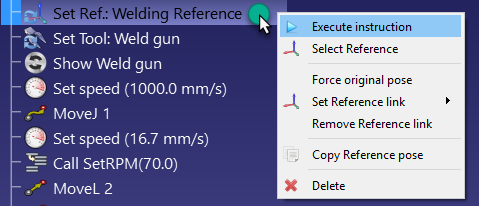
选择程序➔![]() 设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
设置参考帧指令使用一个特定的参考系。这将为以下运动指令更新控制器上给定的参考系,并将改变活跃的RoboDK中机器人的参考框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将根据最后一个参考框架集做出。
参考系是一个变量,也称为Work Object (ABB机器人)、UFRAME (Fanuc机器人)、frame (Motoman机器人)或$BASE (KUKA机器人)。
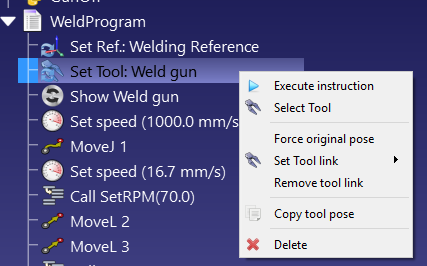
选择程序➔![]() 设置工具框架说明使用特定的工具框架(TCP)。这将更新给定的工具框架上的程序为以下移动指令,并将改变活跃的RoboDK中机器人的工具框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将针对最后一个工具框架集做出。
设置工具框架说明使用特定的工具框架(TCP)。这将更新给定的工具框架上的程序为以下移动指令,并将改变活跃的RoboDK中机器人的工具框架,用于仿真目的。这意味着针对特定目标(笛卡尔目标)的运动指令将针对最后一个工具框架集做出。
参考系是一个变量,也称为ToolData (ABB机器人)、UTOOL(发那科机器人)、TOOL(摩托曼机器人)或$TOOL(库卡机器人)。
选择程序➔![]() 移动循环指令添加一个新的圆周运动指令。或者,选择工具栏中相应的按钮。
移动循环指令添加一个新的圆周运动指令。或者,选择工具栏中相应的按钮。
除非在添加指令之前选择了两个目标,否则移动指令不会创建新目标。需要分别添加另外两个目标,并从圆周移动指令中将它们链接起来,如下图所示。
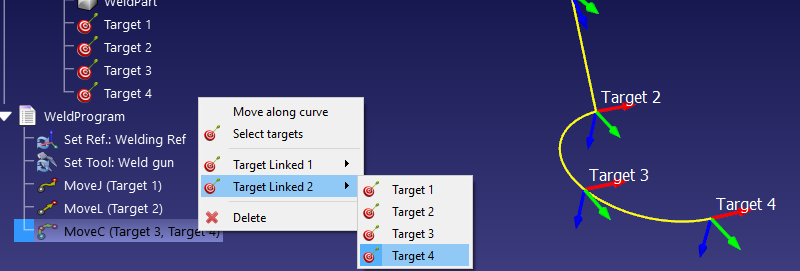
圆形路径是从机器人所在的点创建的圆弧,经过第一个圆形点(目标链接1)并在终点(目标链接2)结束。
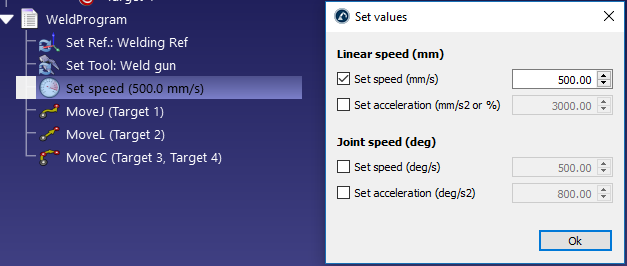
选择程序➔![]() 设定速度指令添加一条改变速度和/或加速度的新指令。可以在关节空间和笛卡尔空间中指定速度和加速度。
设定速度指令添加一条改变速度和/或加速度的新指令。可以在关节空间和笛卡尔空间中指定速度和加速度。
激活相应的案例,在程序中施加特定的速度和/或加速度。机器人的速度从执行该指令的那一刻起生效。
在机器人参数菜单中也可以改变机器人的速度:双击机器人,选择参数。
选择程序➔![]() 显示信息指令添加将在教学挂件上显示消息的新指令。
显示信息指令添加将在教学挂件上显示消息的新指令。
选择程序➔![]() 暂停指令增加一条新指令,使程序暂停执行一段时间或停止程序,直到操作员希望继续执行程序为止。
暂停指令增加一条新指令,使程序暂停执行一段时间或停止程序,直到操作员希望继续执行程序为止。
选择程序➔![]() 程序调用指令从当前程序添加对子程序的调用。
程序调用指令从当前程序添加对子程序的调用。
默认情况下,这是对特定程序的阻塞调用。然而,它是可以切换到插入代码在此指令的位置输入特定的代码。这可能对特定的应用程序和特定的控制器有用。
从程序调用来螺纹触发对子程序的非阻塞调用。在这种情况下,控制器将启动一个新线程。此选项仅适用于某些控制器,且仅适用于特定操作。
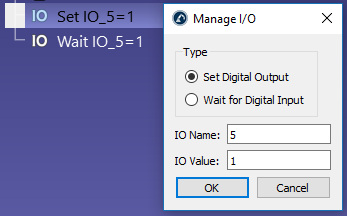
选择程序➔![]() 设置或等待I/O指令改变数字输出(DO)的状态。默认情况下,该指令设置为设置数字输出.该指令还允许等待一个特定的数字输入(DI)切换到一个特定的状态。
设置或等待I/O指令改变数字输出(DO)的状态。默认情况下,该指令设置为设置数字输出.该指令还允许等待一个特定的数字输入(DI)切换到一个特定的状态。
IO Name可以是一个数字,如果它是一个命名变量,也可以是一个文本值。IO值可以是一个数字(0表示False, 1表示True),如果是命名状态,可以是一个文本值。
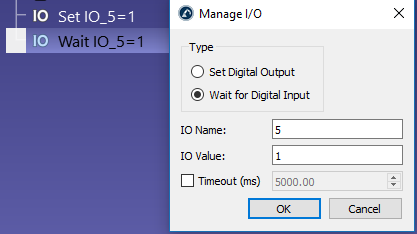
设置为“等待数字输入”以停止程序执行,直到特定输入更改为特定值。此外,大多数机器人控制器支持超时延迟,当等待时间超过特定值时引发错误。检查超时时间(毫秒)选项以激活此功能。
改变模拟数字输入和数字输出将创建新的工作站变量。要检查这些变量的状态,您可以右键单击站点并选择站点参数。也可以通过API读取或修改这些变量。
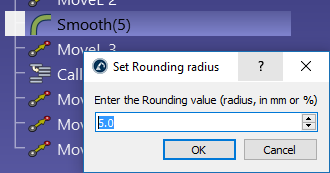
选择程序➔![]() 设置舍入指令更改舍入精度。用于在连续移动之间平滑边缘的舍入精度。这个更改从它在程序中执行的那一刻起生效(与所有其他指令一样),所以通常在程序开始时设置这个值。
设置舍入指令更改舍入精度。用于在连续移动之间平滑边缘的舍入精度。这个更改从它在程序中执行的那一刻起生效(与所有其他指令一样),所以通常在程序开始时设置这个值。
在没有舍入指令的情况下,机器人在每次运动结束时的速度将达到0(除非下一个运动与前一个运动相切)。这将引起高加速和快速的速度变化,以确保每个动作的最佳准确性。
这个值也被称为混合半径(Universal Robots), ZoneData (ABB机器人),CNT/FINE (Fanuc机器人),拐角(Mecademic机器人)或$APO. cdis /$APO。CPTP/Advance(库卡机器人)。
有些控制器需要将此值设置为百分比,例如在Fanuc控制器上,如果要提供CNT5命令,则应输入值5。
参数中指定舍入参数项目活动窗口,如果您正在生成机器人加工,3D打印或曲线/点跟踪程序。
RoboDK的路径精度测试可以让我们更好地理解不同舍入策略的效果。
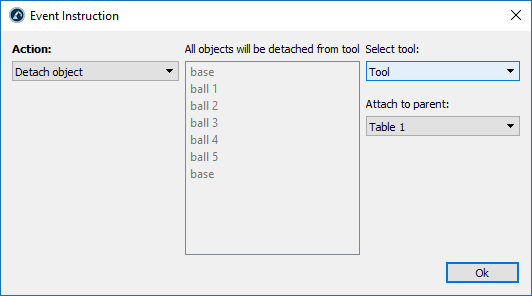
选择程序➔![]() 模拟事件指令来引发一个特定的模拟事件。模拟事件对生成的代码没有影响,并且仅用于引发用于模拟目的的特定事件。
模拟事件指令来引发一个特定的模拟事件。模拟事件对生成的代码没有影响,并且仅用于引发用于模拟目的的特定事件。
使用图形用户界面的模拟事件允许您:
·将物体连接或分离到机器人工具上
·显示或隐藏对象或工具
·改变物体和参考系的位置
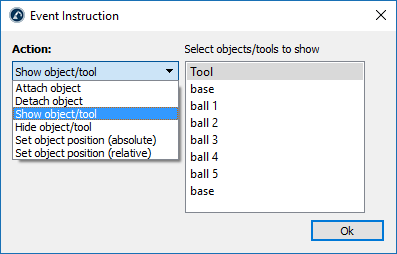
例如,如果机器人移动到一个特定的位置去抓取一个物体,我们可以设置一个连接对象事件将该物体与机器人一起移动。然后,在机器人移动并准备离开物体后,我们可以设置一个分离对象事件以留下工具抓取的任何对象。