机器人制造
本节将展示如何离线准备一个简单的RoboDK项目用于机器人加工。机器人加工单元必须至少有一个机器人、一个工具(EOAT)和一个参考系(也称为坐标系、零件参考或基准)。更多关于在RoboDK中建立一个新站的信息开始部分。

下面的步骤展示了如何使用KUKA KR210机器人和Teknomotor铣削主轴准备机器人加工设置(此示例可在库中作为Sample-New-Project.rdk)。
1 -选择一个机器人:
一个。选择文件➔![]() 开放网上图书馆.
开放网上图书馆.
b。使用过滤器找到你的机器人品牌,有效载荷,…
例如,选择库卡kr210 r2700(210公斤有效载荷,2.7米射程)。
c。选择2022世界杯国家队名单机器人应该会自动出现在主屏幕上。
2 -选择一个工具:
一个。从相同的在线库中,选择Reset以删除筛选器和筛选by类型➔工具.
b。选择2022世界杯国家队名单加载主轴工具,如Teknomotor ATC71-C-LN主轴。
c。主轴将自动连接到机器人上。
d。关闭在线图书馆窗口。
3 -添加一个参考系:
一个。选择机器人基础框架(命名为库卡KR210 R2700基地).
b。选择程序➔![]() 添加参考系.一个新的参考系将被添加到机器人基座上。
添加参考系.一个新的参考系将被添加到机器人基座上。
c。双击参考并输入坐标:
XYZABC = [1500,1000,500,0,0,0] (mm-deg)
d。将新的参考系重命名为铣削参考输入新名称或选择F2。
4 -添加你将用于机器人加工的对象(可选):
一个。选择文件➔![]() 开放
开放
b。选择一个名为对象象棋卢克来自RoboDK库:
C: / RoboDK /库
c。将对象拖放到铣削引用中,如果它没有被自动放置在那里(在站树中)
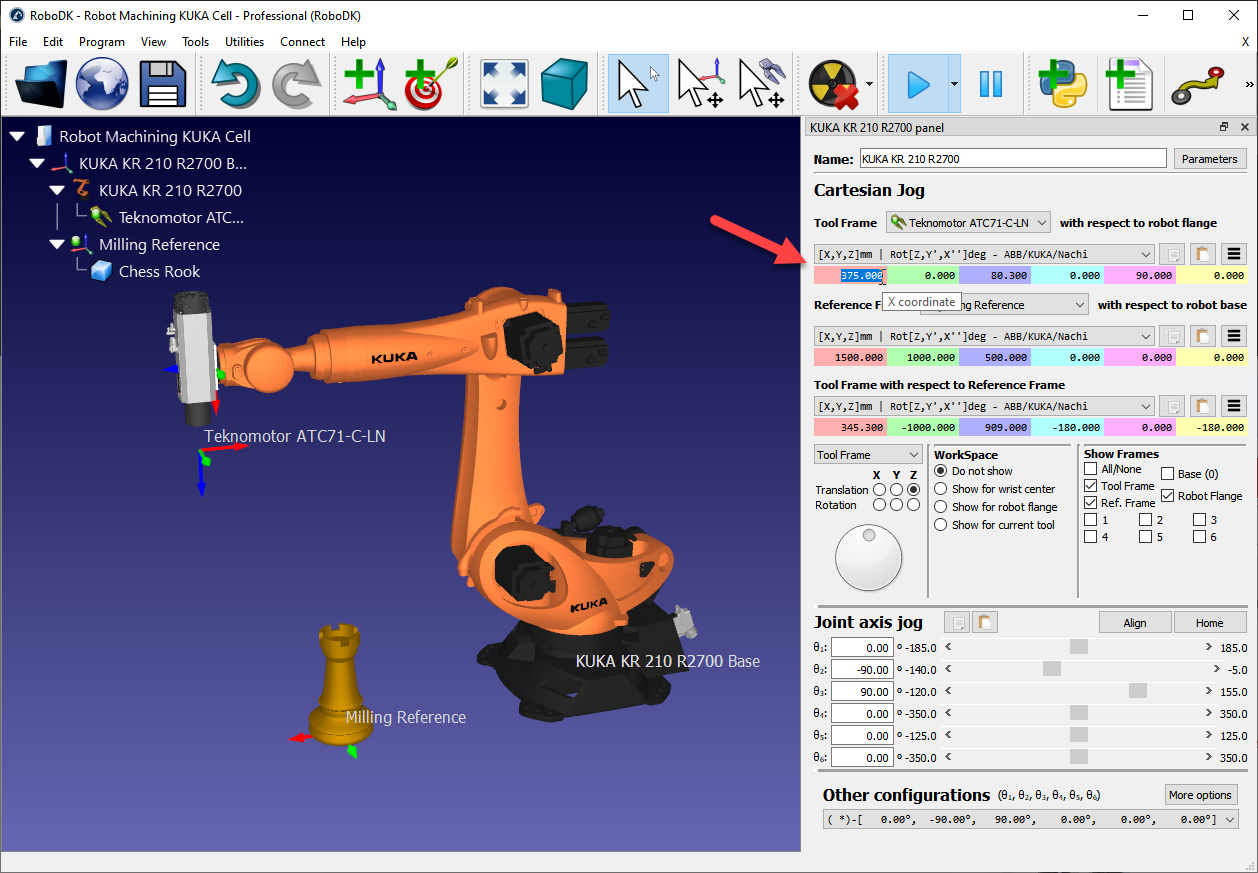
5 -双击机器人查看机器人面板(可选)。机器人面板显示活动工具和活动参考系。通过选择和更新工具和参考系,我们应该在机器人控制器中看到相同的坐标。默认情况下,Teknomotor主轴在工具架的根部有TCP。工具(TCP)将具有一定的长度。在这个例子中,我们将更新TCP来表示刀具刀具的长度:
一个。更新工具X坐标(TCP)为375毫米。您将看到TCP沿轴移动。
b。(可选)您还可以创建第二个工具,并通过沿着Z轴添加一个转换来定义相对于第一个工具的TCP。
c。关闭机器人面板窗口。