机器人制造
按照以下步骤在RoboDK中建立一个新的机器人加工项目,使用CAM软件(如G-code或APT)生成NC文件:
1.选择公用事业公司➔![]() 机器人加工项目(Ctrl + M)。
机器人加工项目(Ctrl + M)。
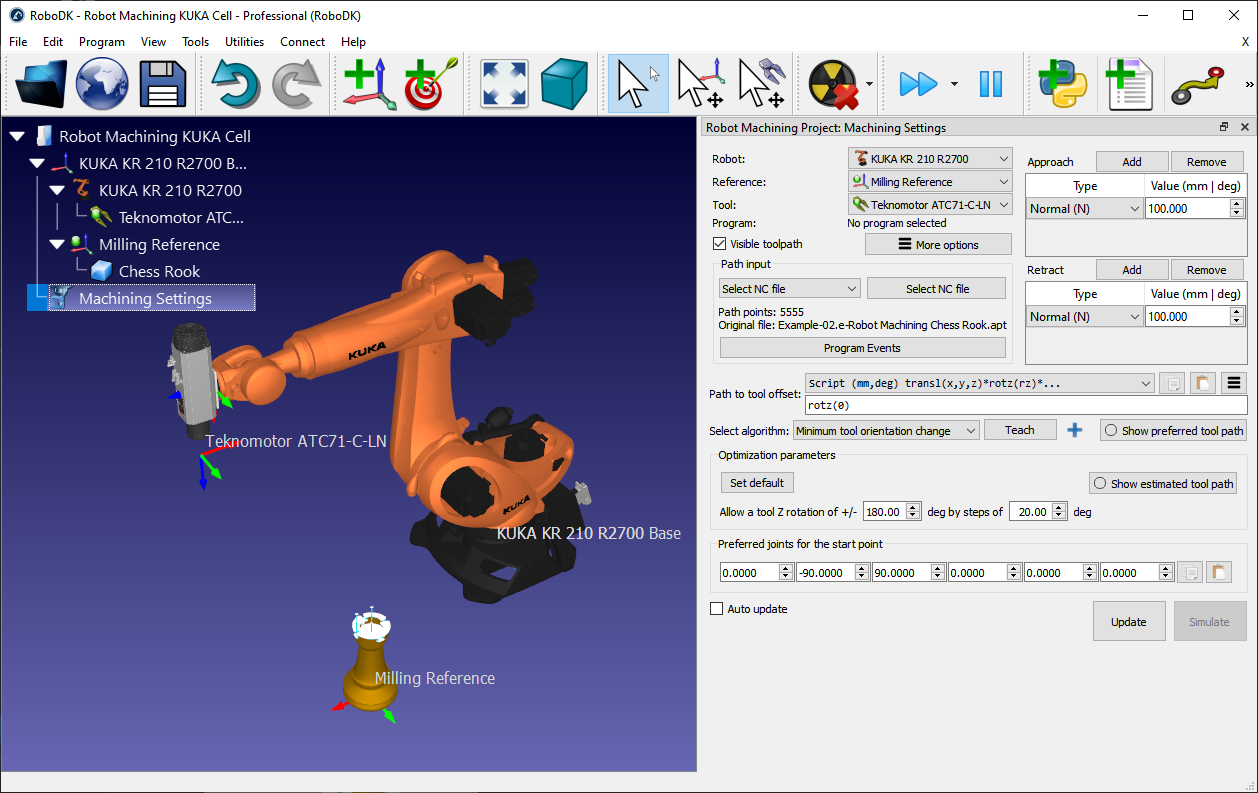
将弹出一个新窗口,如图所示。
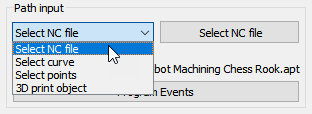
2.选择选择NC文件在路径输入部分中
3.提供NC文件,如以下APT加工文件:
C: / RoboDK /图书馆/ Example-02。电子机器人加工象棋菜鸟
4.将机器人加工项目重命名为加工设置右键单击树中的新项目并选择重命名(F2).
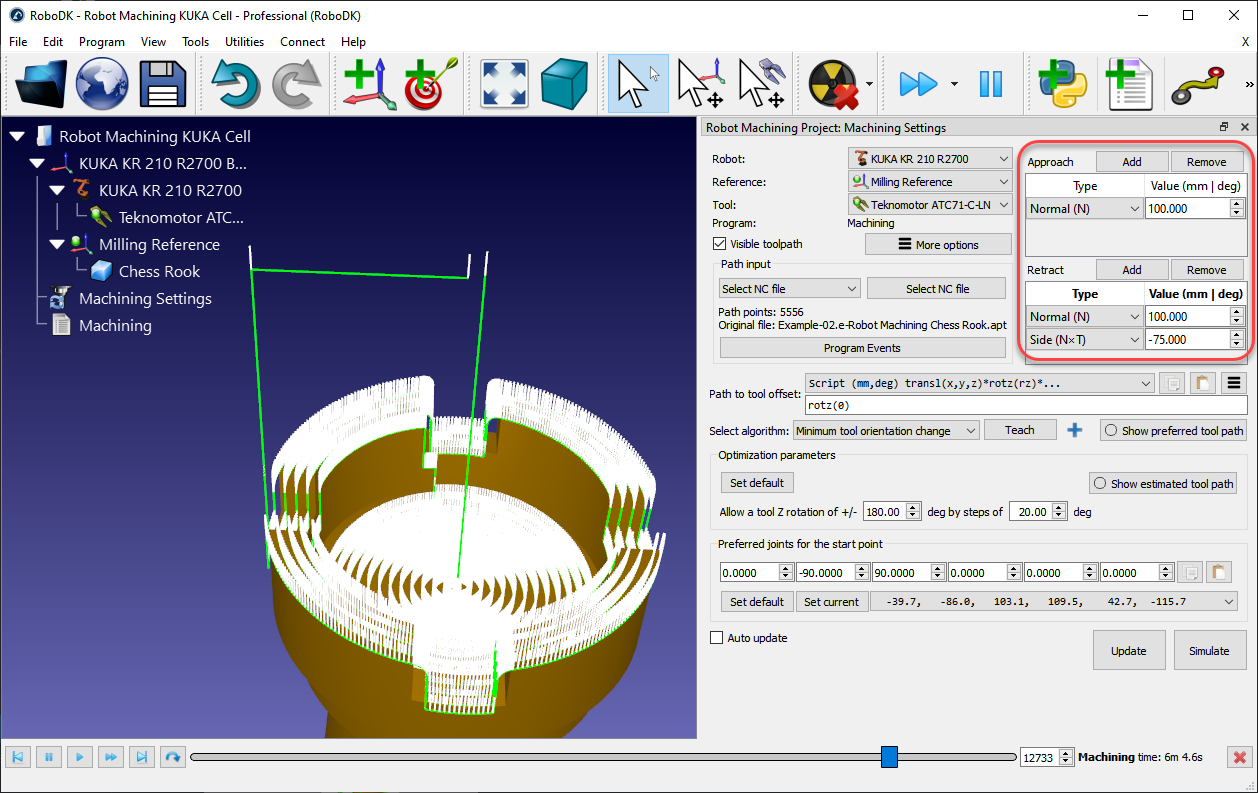
在菜单的左上角选择机器人、参照系和工具,如下图所示。相对于正确的坐标系,工具路径应该以绿色显示。
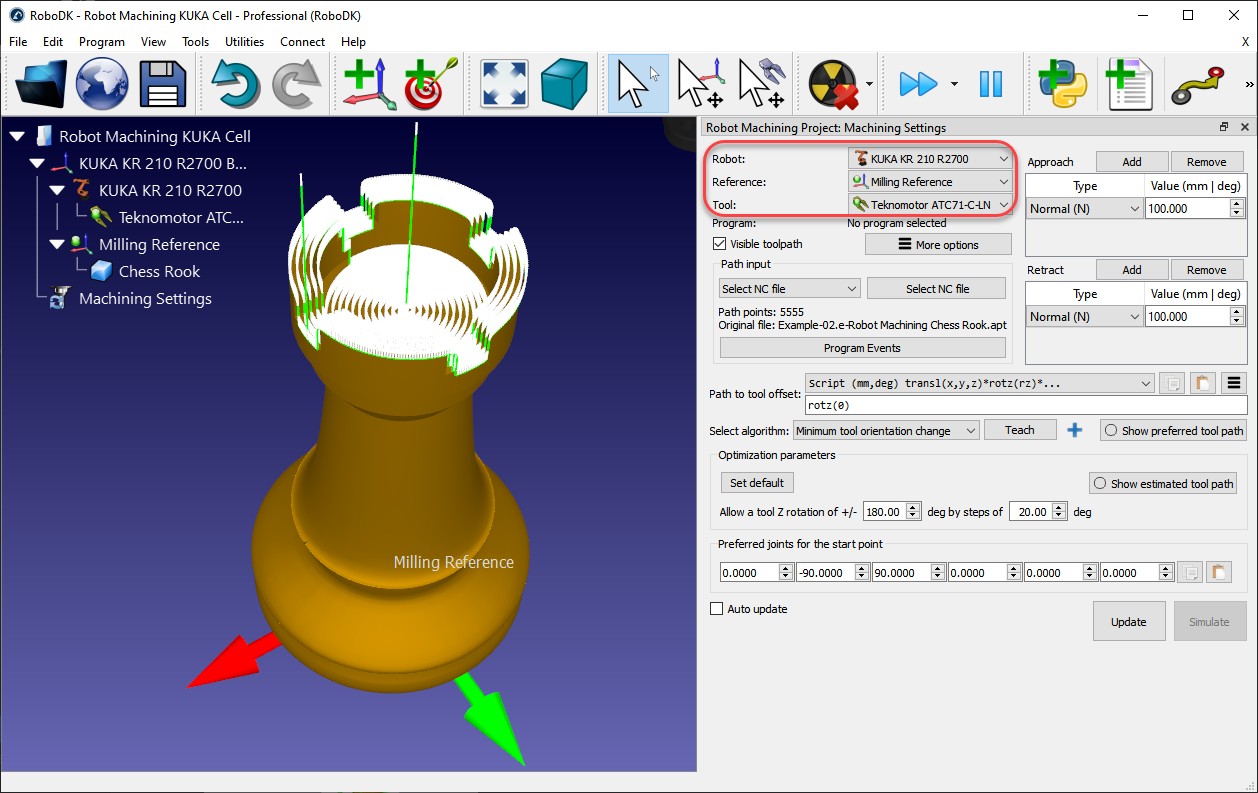
加工刀具路径以绿色显示,路径法线以白色矢量显示。取消选中“可见工具路径”以隐藏工具路径。
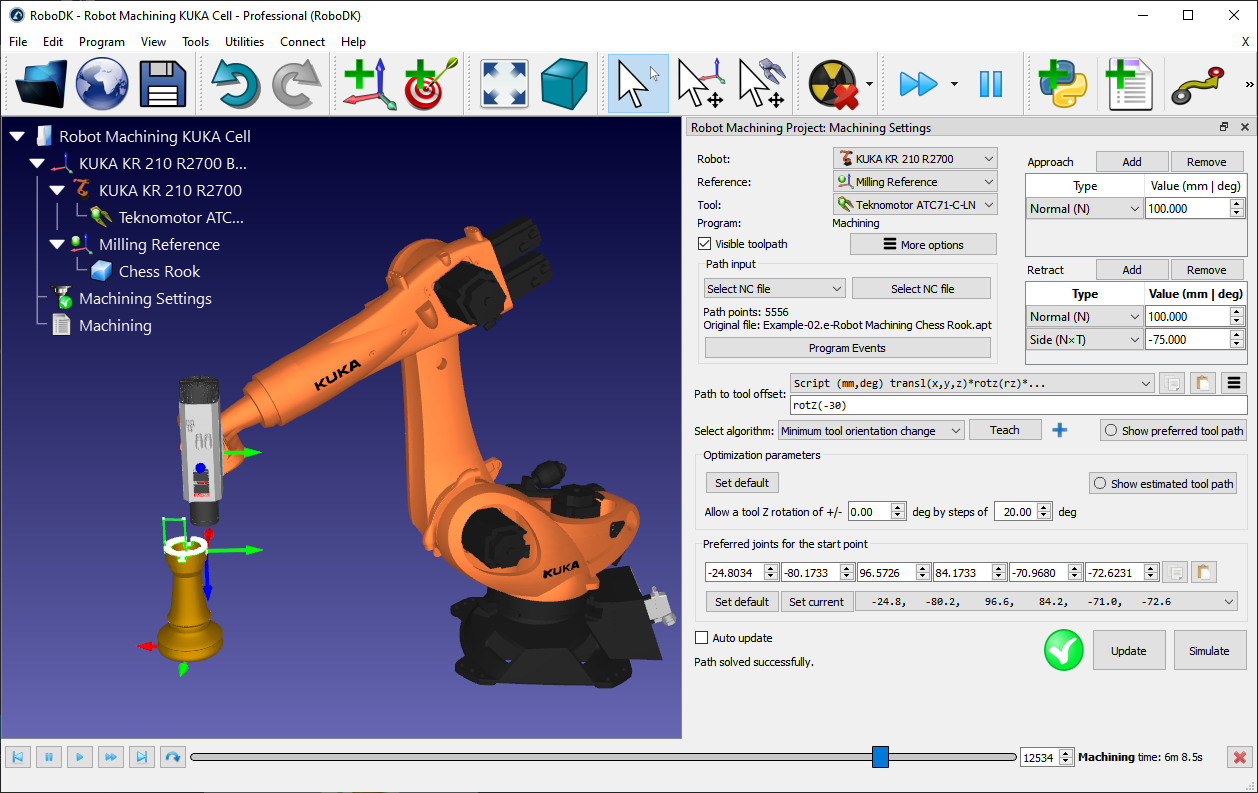
你可以选择更新看看是否可以用默认设置创建一个机器人加工程序。如果程序成功生成,您将看到一个绿色的复选标记。然后你可以选择模拟或者双击生成的程序来查看模拟开始。
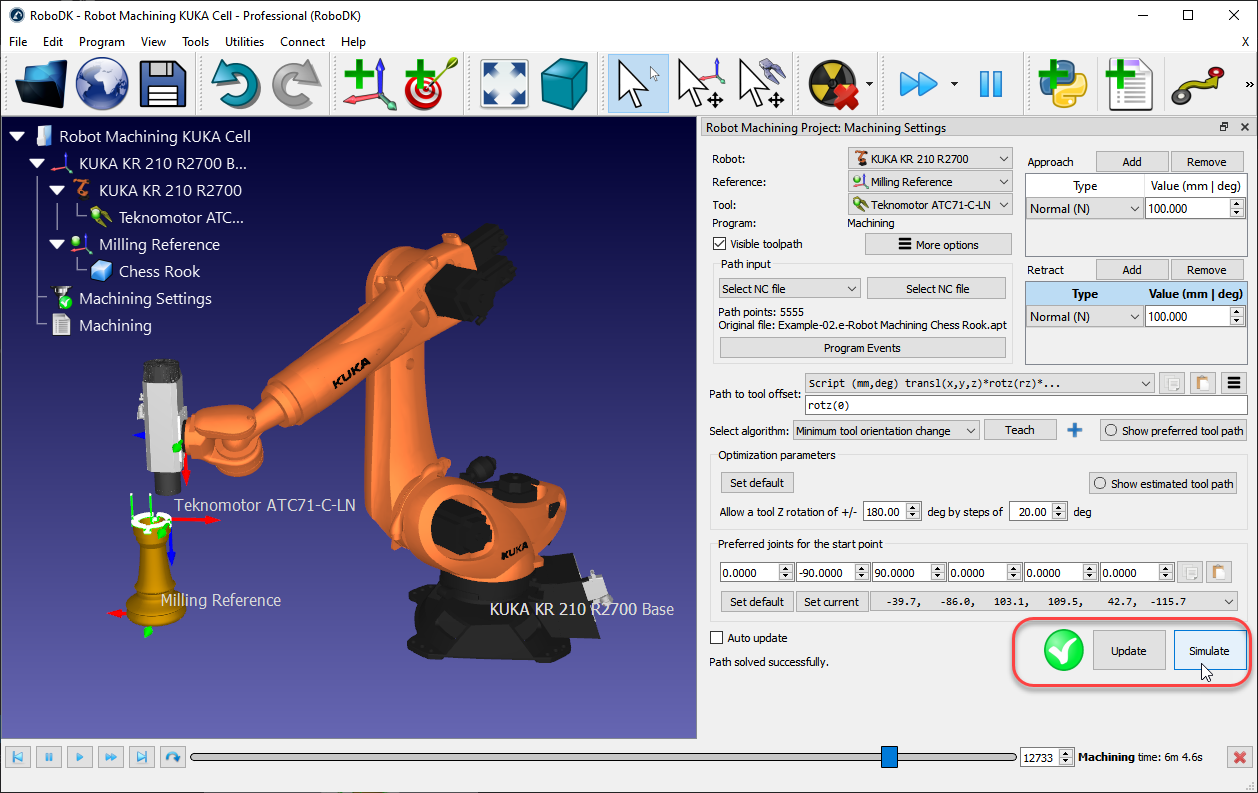
如果您看到带有警告信息的红色十字,则意味着您的机器人加工程序不可行。您可能必须更改一些设置,如刀具方向,优化参数,起点或零件的位置。
以下部分提供了关于如何定制机器人加工设置的更多信息。
路径输入允许您选择不同的方式来提供工具路径。
·选择NC文件:作为一个NC文件(从CAM软件获得),如本节所述。
·选择曲线:作为一个或多个曲线,如中所述曲线跟踪项目部分。
这是可能的进口曲线作为RoboDK的坐标列表。
·选择分:一个或多个点,如中所述点跟踪项目部分。
这是可能的进口分作为RoboDK的坐标列表。
·3D打印对象:作为3D打印的对象。切片器用于将几何图形转换为工具路径
选择项目活动显示生成机器人程序时需要考虑的特殊事件。这包括触发更换工具,设置主轴转速在RPM或触发特定程序的程序开始或程序完成。
您可以指定舍入值在程序事件中。这将在程序开始时自动创建一个舍入指令,并有助于使机器人加工程序更平滑,防止机器人晃动。例如,在ABB机器人上,这将以毫米为单位设置ZoneData值,在发那科机器人上,这将以百分比设置碳纳米管值,在优傲机器人控制器上,它将以毫米为单位设置混合值。
如果您正在使用g代码或NCI文件,默认情况下,自定义M代码将作为对M_RunCode的函数调用触发(M代码作为参数传递)。您可以通过删除对M_RunCode的调用来删除自定义M调用。
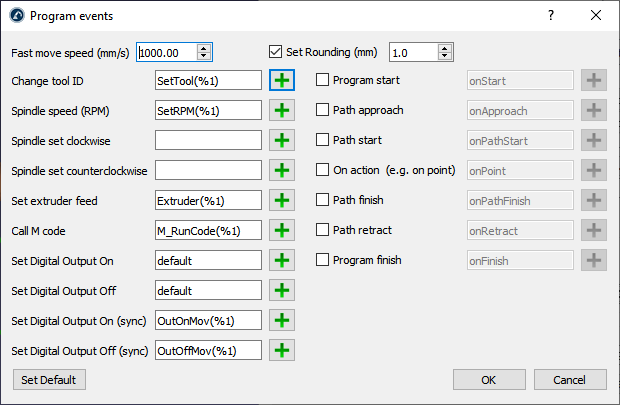
将鼠标光标移到相应的字段上以获取更多信息,以自定义每个部分。
例如,当更改工具时,您可以使用%1值来表示CAM软件提供的工具ID。如果您更喜欢触发静态函数而不是传递参数,则可以替换SetTool (% 1)通过SetTool % 1.当使用工具2时,这将生成SetTool2而不是SetTool(2)。
您可以自定义您的方法,并从机器人加工菜单的右上方收回运动。默认情况下,RoboDK增加了沿法线100毫米的接近和收缩运动。
选择添加增加一个额外的收缩运动。绿色路径将相应更新。它可以选择沿着特定的轴移动,提供坐标,有一个弧的方法等。的方法来组合多个接近/收回动作添加按钮。
选择删除移开:移开某一特定的途径或收回运动
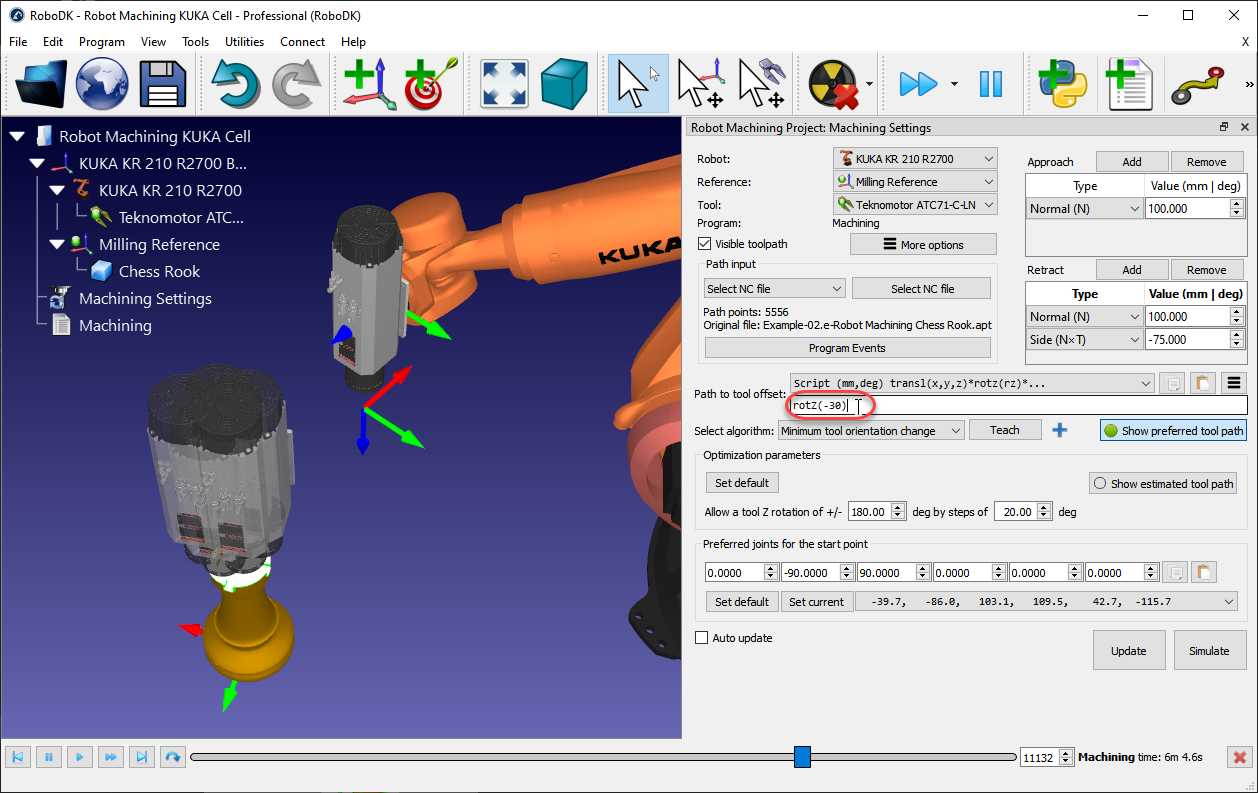
刀具偏移的路径允许沿着刀具路径改变刀具的首选方向。此选项主要用于将工具绕TCP的Z轴旋转。这允许处理6th绕刀具轴的自由度。根据应用程序及其要求提供了几个选项。例如,您可以选择最小化刀具方向或沿着路径遵循刀具方向。
由于6轴机器人用于遵循3轴或5轴CNC制造程序,我们有一个额外的自由度来定义。这个自由度通常是围绕TCP的Z轴旋转。这种额外的自由度对于避免奇点、关节极限、碰撞或可达性问题尤其有用。
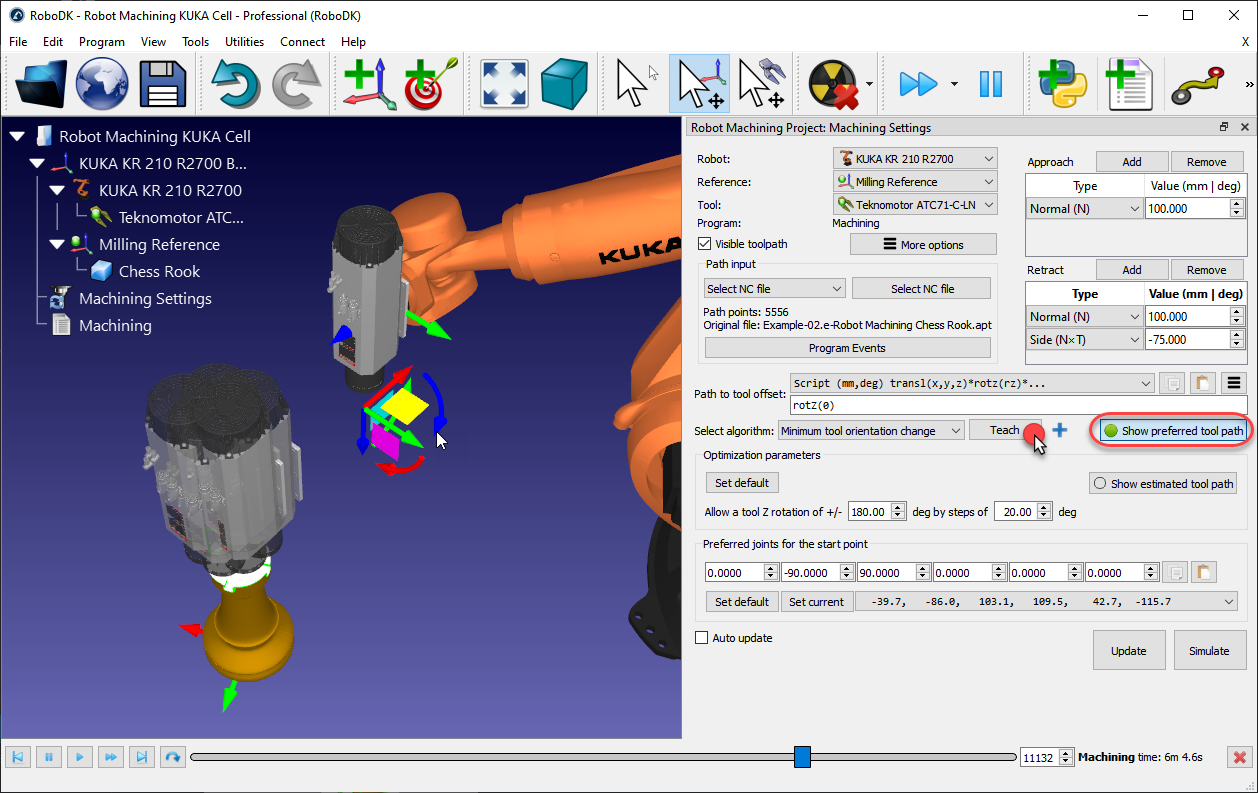
默认情况下,工具偏移量的路径显示一个rotz (0)转换。这意味着您可以围绕工具的Z轴添加额外的旋转。可以修改此值以建立工具的首选方向,修改TCP的Z轴周围的方向或与其他轴的组合。首选方向是机器人在沿着刀具路径时试图保持的方向。
默认情况下,RoboDK使用最小刀具方向变化算法。这意味着刀具的方向沿着刀具路径尽可能保持不变。一般来说,这个选项适合铣削操作,因为它最大限度地减少了机器人关节运动。或者,还有其他可用的算法/方法,例如沿着刀具路径的刀具方向(有用的切割应用,其中刀片需要保持切线沿着路径),或手持物体的机器人如果需要遵循附加到机器人工具上的刀具路径(例如,用于点胶或抛光应用,也称为远程TCP配置)。
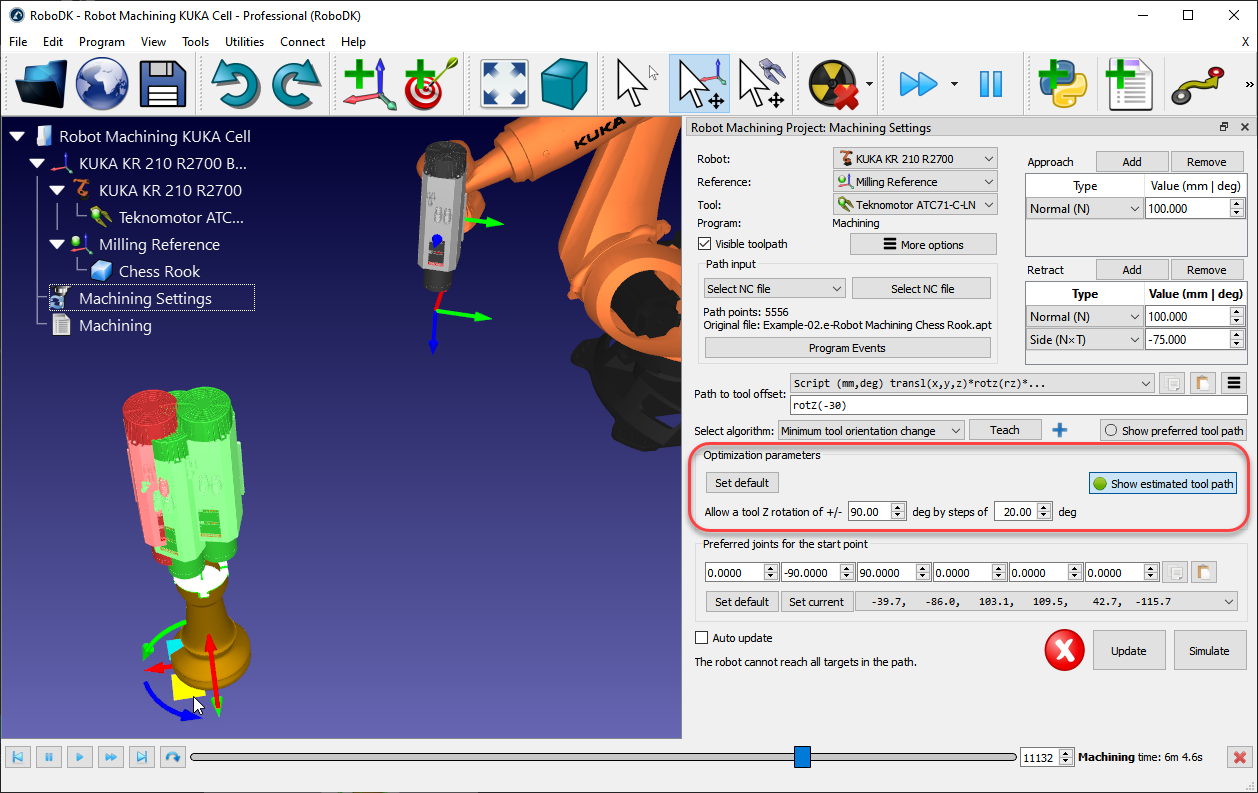
给定一个首选的刀具方向,机器人可以有一定的自由度来围绕刀具的Z轴旋转。这使得机器人可以避免机器人奇点、关节极限并确保所有点都可达。默认情况下,RoboDK允许工具围绕TCP轴旋转+/-180度,增量为20度。
建议根据应用程序来限制这种旋转。例如,可以输入+/-90度来限制允许的旋转一半。减小该参数也将减少获得程序的处理时间。
如果路径的某些点无法到达,建议旋转参考系或更允许工具Z旋转。移动参考系可以通过握住Alt键并拖动坐标系,以更好地适应机器人工作空间内的零件。
RoboDK自动选择更靠近首选启动关节的启动配置(首选关节为起点)。从这一点开始,机器人将遵循线性运动,因此机器人的构型不会改变。
下拉菜单将显示启动程序的所有可能的解决方案。如果需要,选择一个首选的机器人关节构型,并选择更新重新计算程序。
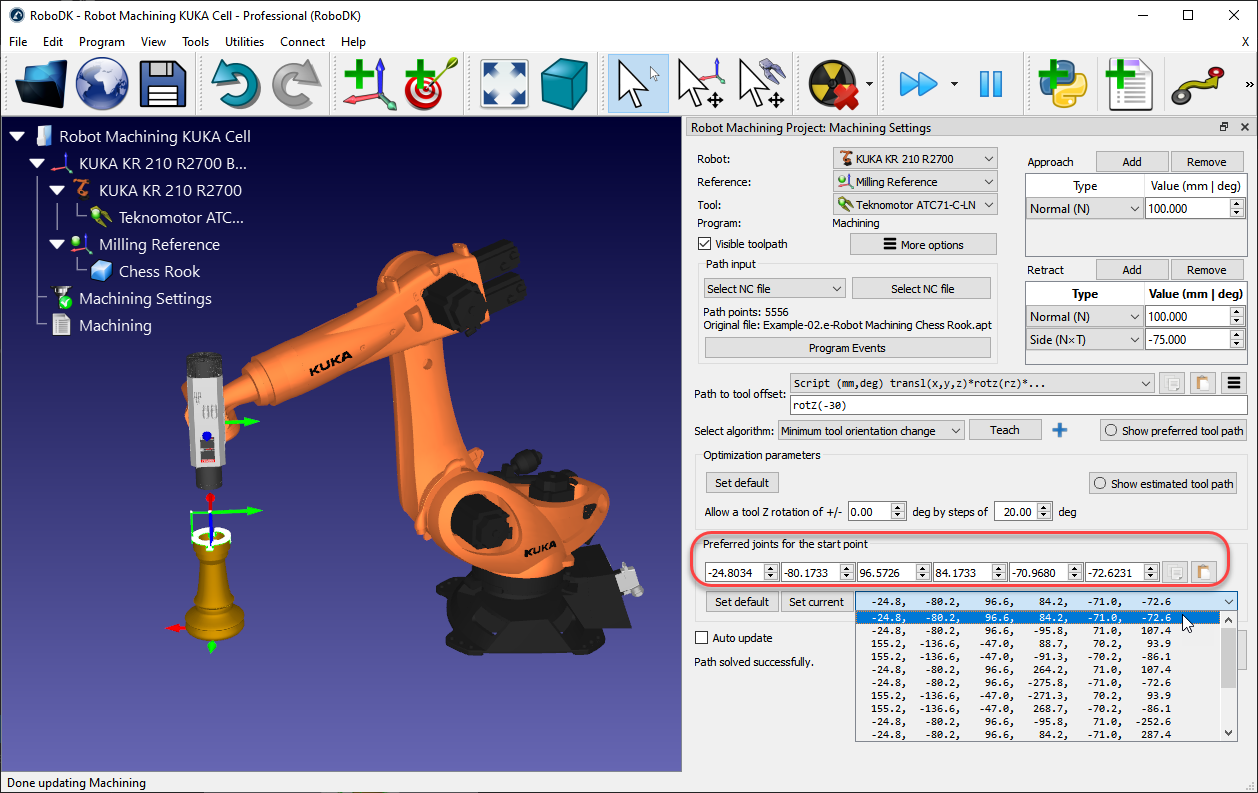
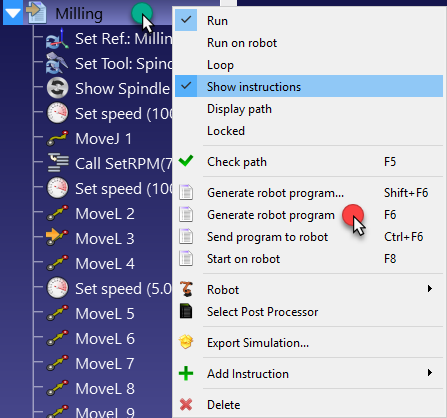
选择更新生成给定设置的机器人程序。如果程序创建成功,系统会显示绿色的复选标记。然后你会在电台里看到一个新节目加工.
双击生成的![]() 程序或选择模拟启动机器人加工仿真。
程序或选择模拟启动机器人加工仿真。
右键单击程序并选择生成机器人程序(F6)生成机器人程序。中有关程序生成的更多信息程序部分。