机器人制造
你可以很容易地模拟机器人跟随点与RoboDK。RoboDK中的点可以从物体、曲线或进口作为CSV文件中的点列表。这个选项对于点焊或钻井应用非常有用。下面的视频展示了一个建立点焊应用程序的例子:观看视频.
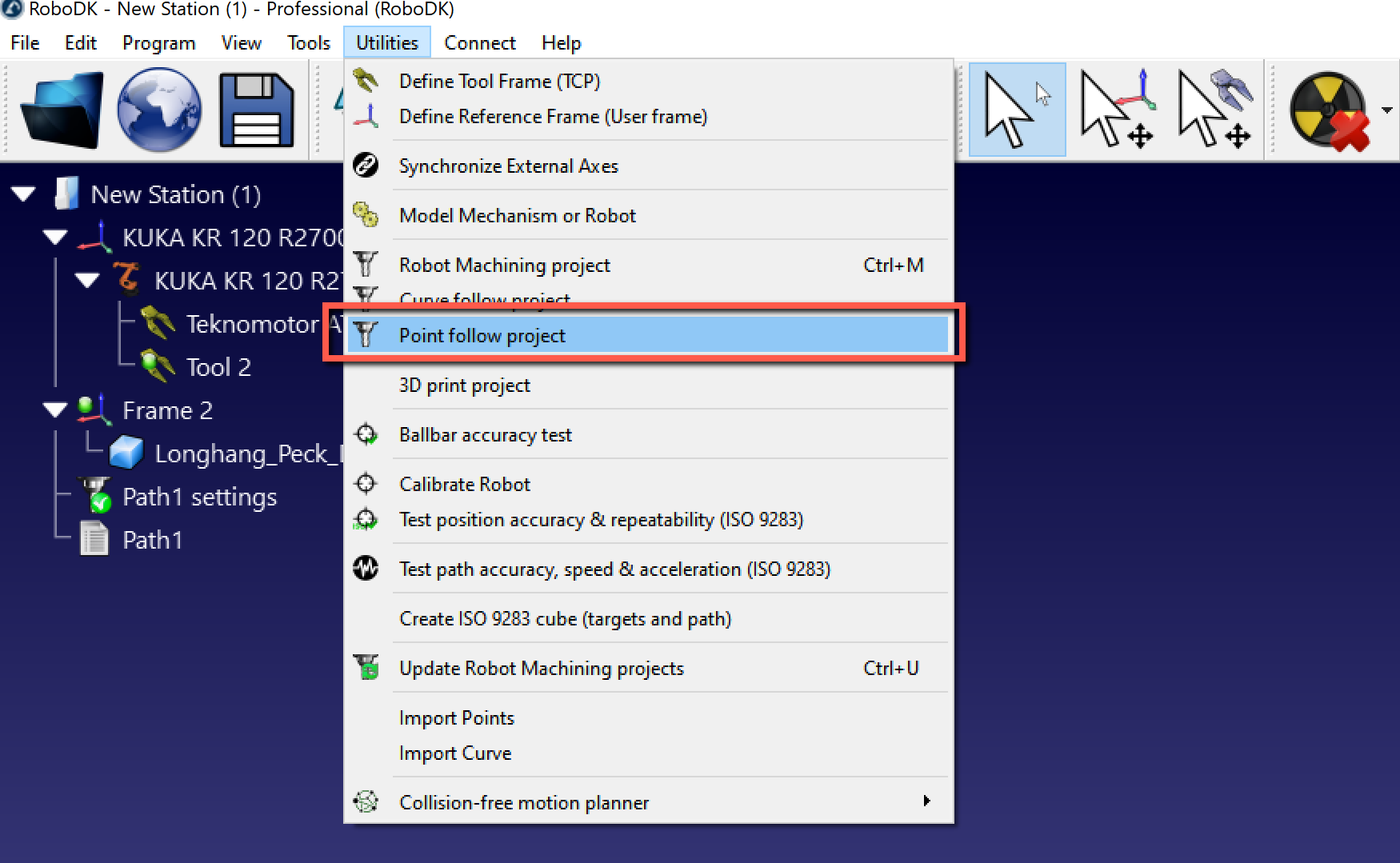
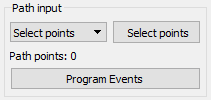
选择公用事业公司➔点跟进项目按设置打开点。这些设置与a相同机器人加工项目,唯一的区别是路输入预设是选择分.
选择选择分选择屏幕上的点。
用鼠标左键单击选择点。选择同一点两次将改变接近方向。此外,右键单击一个点允许通过选择来选择后面的点选择next.
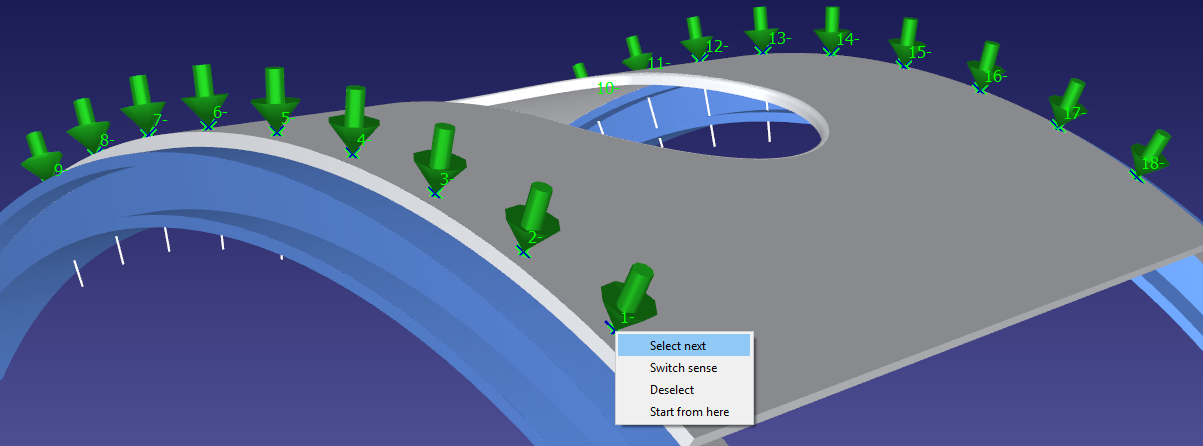
右键单击屏幕并选择完成或按Esc键返回设置菜单。绿色的路径将显示机器人相对于物体的运动。
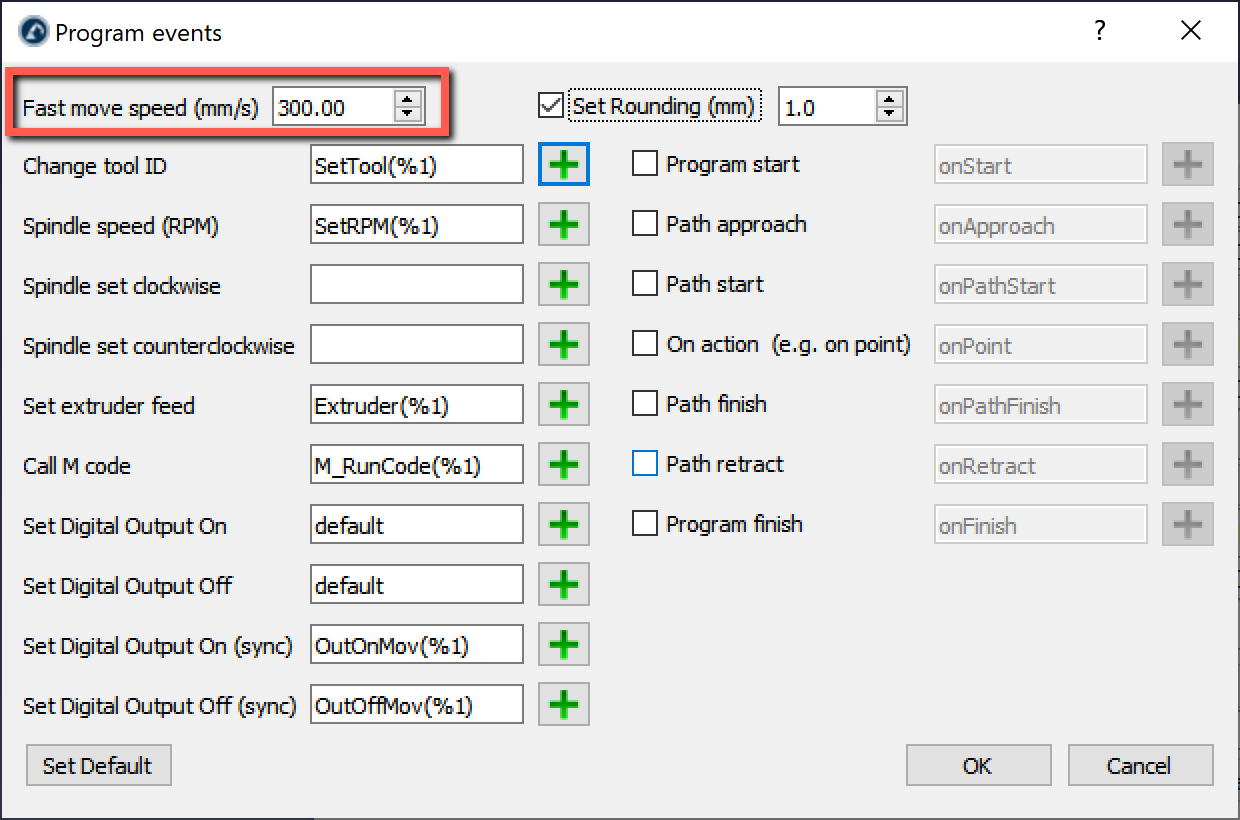
在设置的右上角还有一些其他选项,如工具速度和接近距离。默认设置如下图所示:
![]()
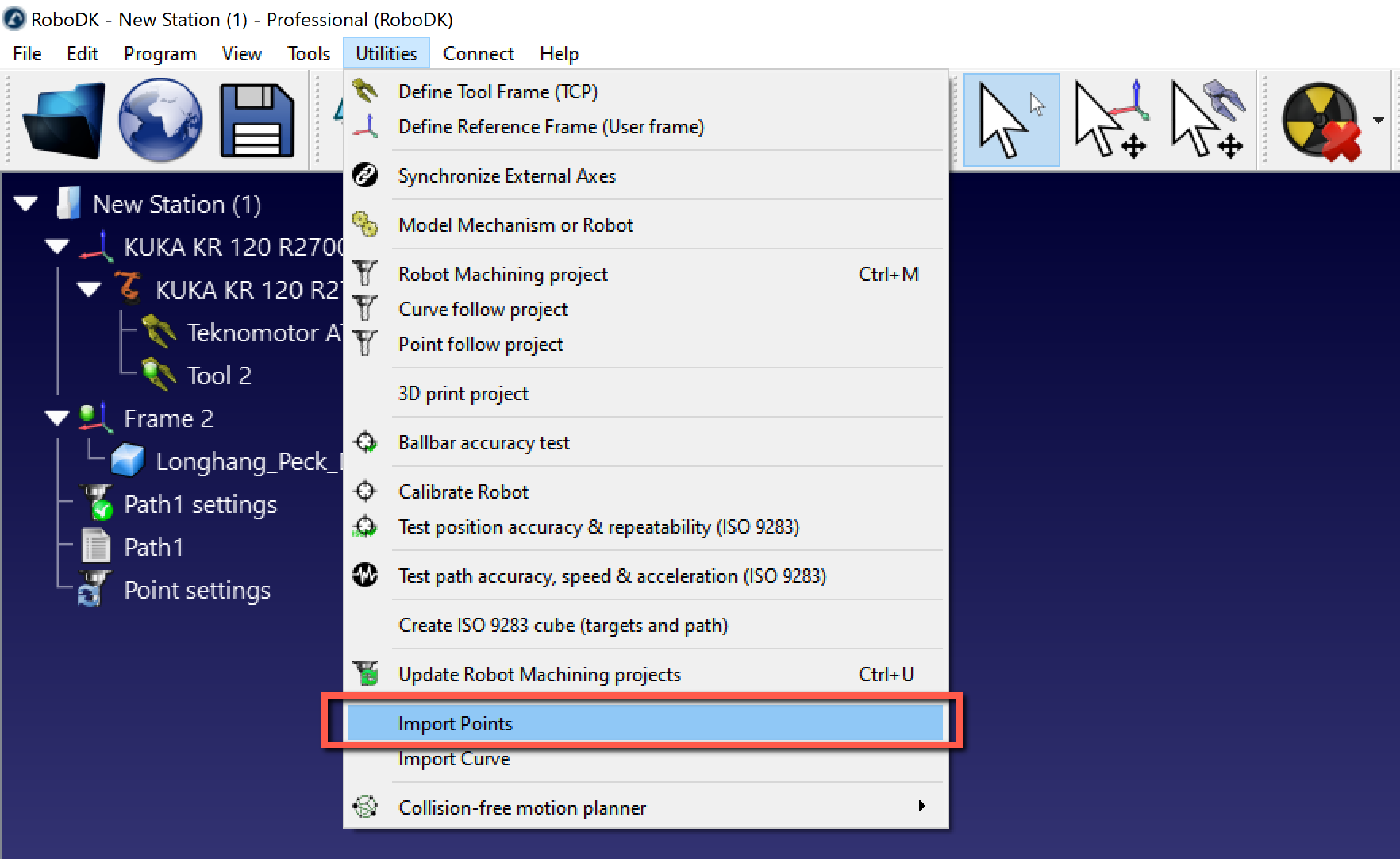
通过选择,可以从文本文件或CSV文件导入点列表公用事业公司➔进口分.站中将出现一个新项目,将这些点作为一个对象显示出来。
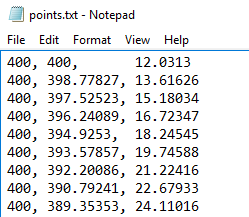
该文件可以是带有曲线上每个点的3D坐标的文本文件。可选地,工具Z轴的方向可以提供为i,j,k向量。
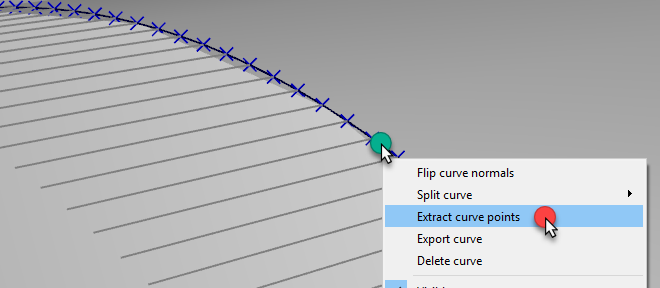
通过右键单击曲线,然后进行选择,可以将对象的现有曲线转换为点提取曲线点.