机器人制造
刀具偏移的路径允许沿着刀具路径改变刀具的首选方向。此选项主要用于将工具围绕TCP的Z轴旋转。这允许处理6th围绕工具轴的自由度。根据应用程序及其需求,提供了几个选项。例如,您可以选择最小化工具方向或沿着路径遵循工具方向。
由于6轴机器人用于遵循3轴或5轴CNC制造程序,我们有一个额外的自由度来定义。这个自由度通常是围绕TCP的Z轴旋转。这种额外的自由度对于避免奇点、关节限制、碰撞或可达性问题特别有用。
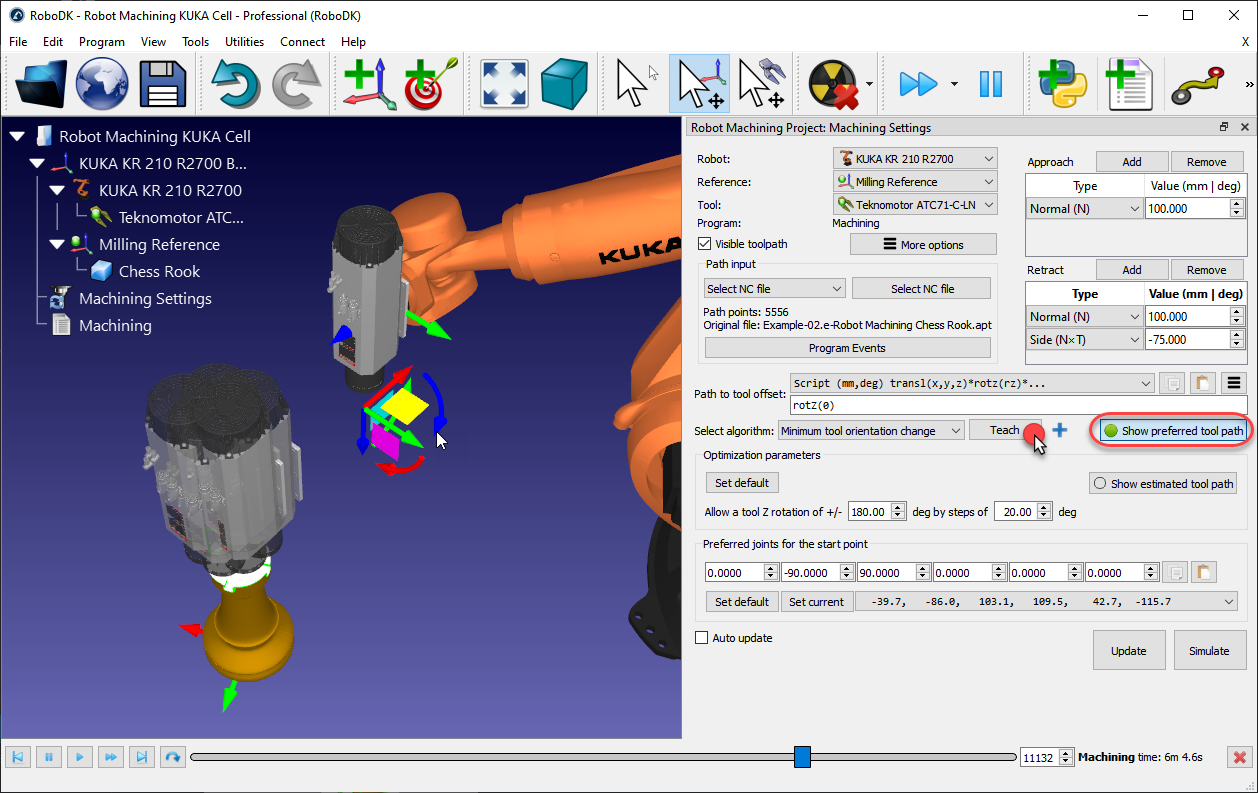
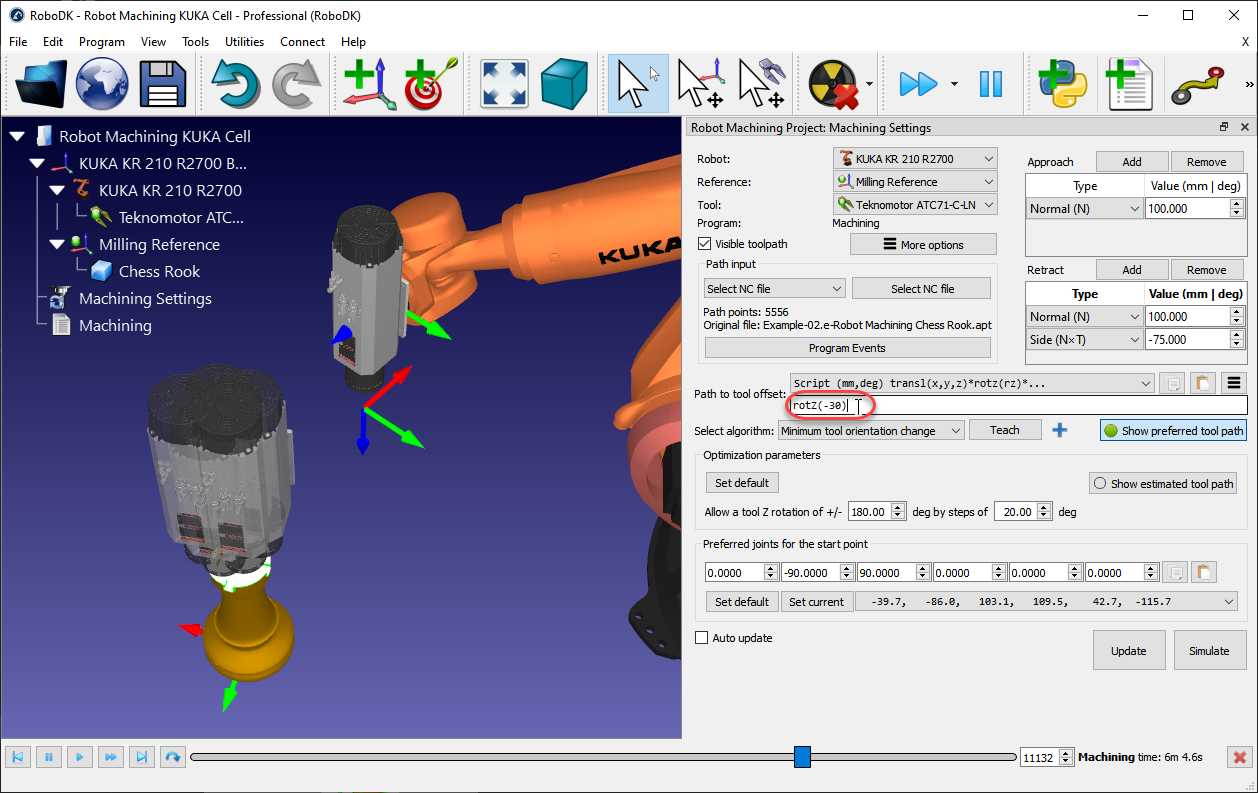
默认情况下,工具偏移量的路径显示为rotz (0)转换。这意味着您可以添加一个额外的旋转,围绕工具的Z轴。可以修改此值以建立工具的首选方向,修改TCP的Z轴或与其他轴结合的方向。首选方向是机器人在沿着刀具路径走时试图保持的方向。
默认情况下,RoboDK使用最小的工具方向变化算法。这意味着刀具的方向沿刀具路径保持尽可能恒定。一般来说,这种选择适用于铣削操作,因为它最大限度地减少了机器人关节的运动。或者,还可以使用其他算法/方法,例如刀具方向遵循刀具路径(适用于切割应用,其中刀片需要沿路径保持切线),或手持物体的机器人如果需要遵循附加到机器人工具的工具路径(例如,用于点胶或抛光应用程序,也称为远程TCP配置)。