给定首选刀具方向,机器人可以有一定的自由度绕刀具Z轴旋转。这允许机器人解决程序,避免机器人奇点,关节限制,并确保所有点都是可达的。默认情况下,RoboDK允许工具围绕TCP轴旋转+/-180度,增量为20度。
建议根据应用程序限制这种旋转。例如,可以输入+/-90度来限制允许的旋转一半。减少该参数也将减少获取程序的处理时间。
提示:
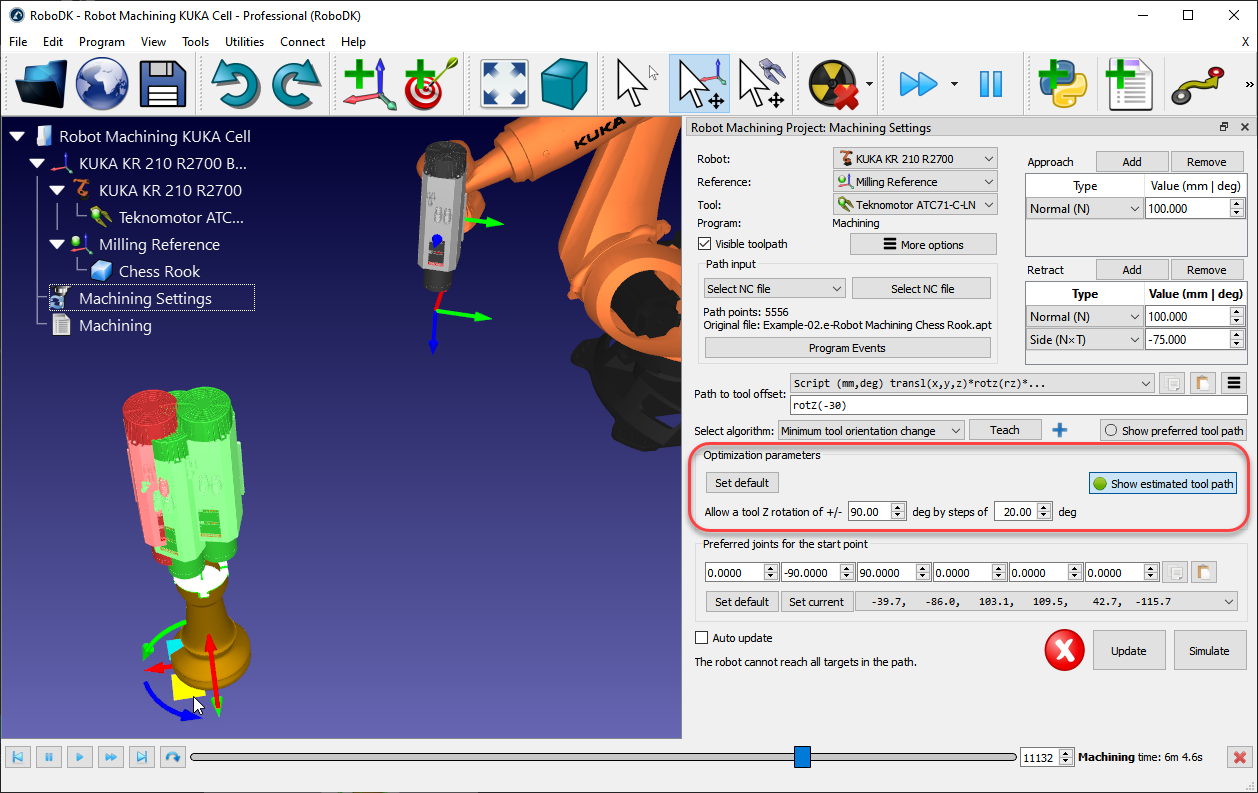
选择显示估计的刀具路径查看可达点(绿色)和不可达点(红色)。可达点可以相对于首选刀具路径旋转,以使机器人可达目标。
如果路径的一些点是不可达的,建议旋转参考系或更允许与工具Z旋转。指针可以移动参考系Alt键并拖动坐标系统,以更好地适应机器人工作空间中的部分。
注意:
当参考帧或TCP被修改时,估计的工具路径将被显示自动更新选项被选中)。这可以指导您找到机器人加工操作的最佳位置。
提示:
较小的步长值允许工具在穿越奇点时更渐进地重新定向。另一方面,计算工具路径可能需要更长的时间。
![机器人加工-图15]()
注意:
设置允许围绕Z旋转为0度,根据首选方向充分约束工具。对于简单的应用程序,机器人在远离奇点或轴限制的情况下工作,也可以将此旋转设置为0度。这对于大型3D铣削应用程序非常有用,其中工具应该保持相同的方向。