机器人制造
使用RoboDK可以使机器人在3D空间中跟随曲线。RoboDK中的曲线可以从物体的边缘或进口作为CSV文件中的点列表。例如,该选项对于机器人焊接应用非常有用。
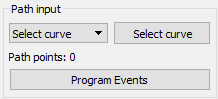
选择公用事业公司➔曲线跟踪项目打开曲线遵循设置。这些设置与a相同机器人加工项目,唯一的区别是路输入被预设为选择曲线.
选择选择曲线在屏幕上选择曲线。
用鼠标左键单击选择曲线。两次选择相同的曲线将切换运动方向。此外,右键单击先前选择的曲线可以切换感觉或取消选择先前选择的曲线。
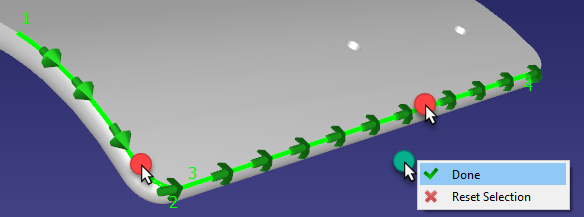
右键单击屏幕并选择完成或按“Esc”键返回设置菜单。绿色路径将显示机器人相对于物体的运动。
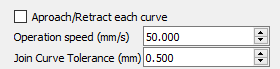
在设置的右上方还有一些额外的选项,比如工具速度,以及是否必须对每条曲线应用接近/后退移动。默认设置如下图所示:
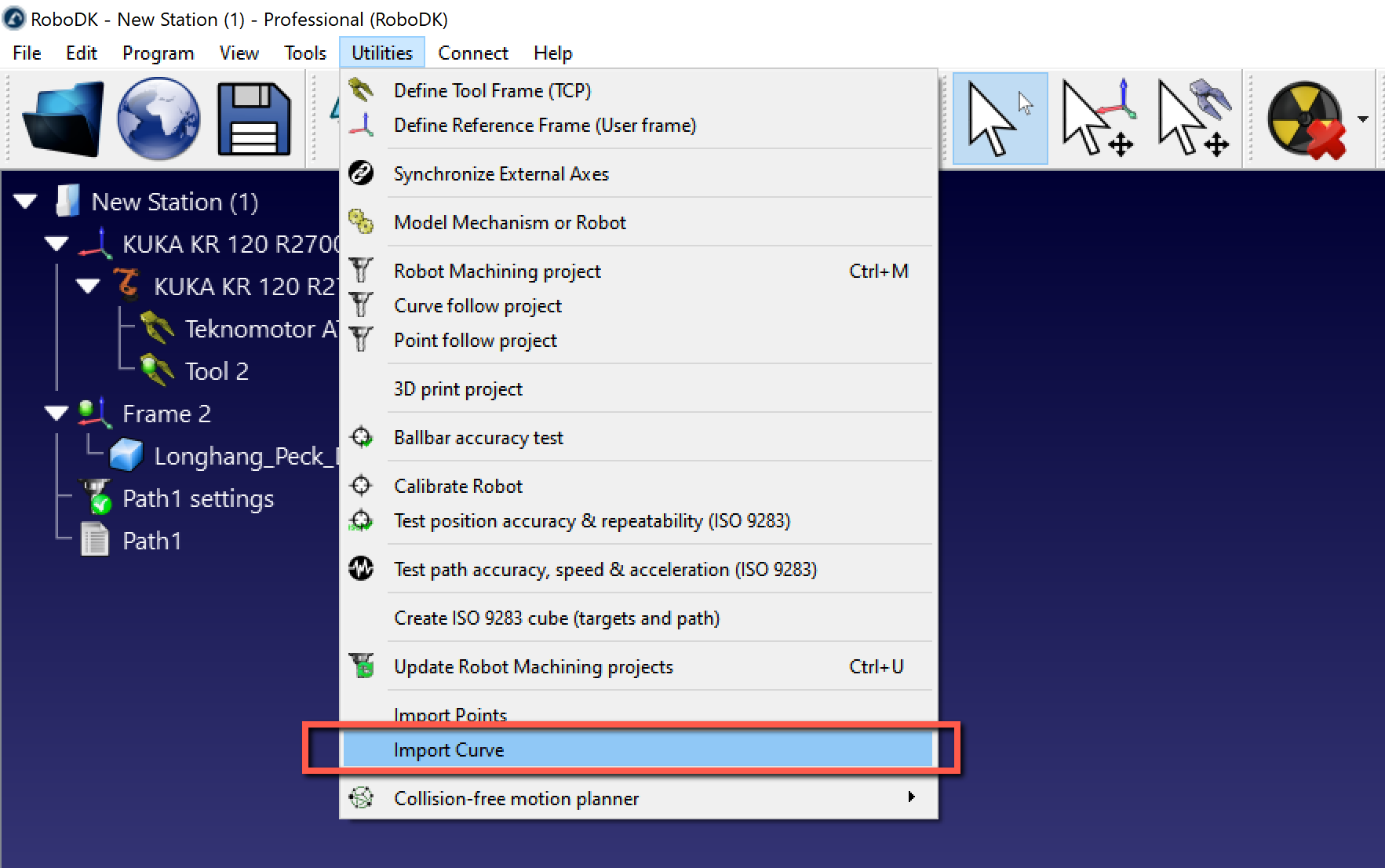
RoboDK中可以选择CSV文件或文本文件导入曲线公用事业公司➔进口曲线.站中将出现一个新项目,将曲线显示为一个对象。
该文件可以是一个文本文件,其中包含曲线上每个点的3D坐标。可选地,工具Z轴的方向可以提供为i,j,k矢量。所有坐标必须相对于零件的坐标系。
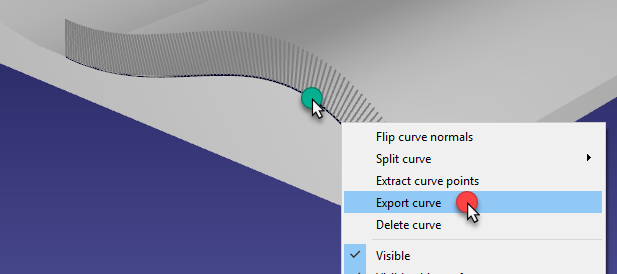
还可以将对象已有的曲线导出为CSV文件(右键单击曲线,选择“导出曲线”),在RoboDK中修改后重新导入。
有关如何自定义导入CSV或TXT文件作为曲线或点的更多信息和示例,请参阅RoboDK API的示例部分.