Robot Calibration (Laser Tracker)
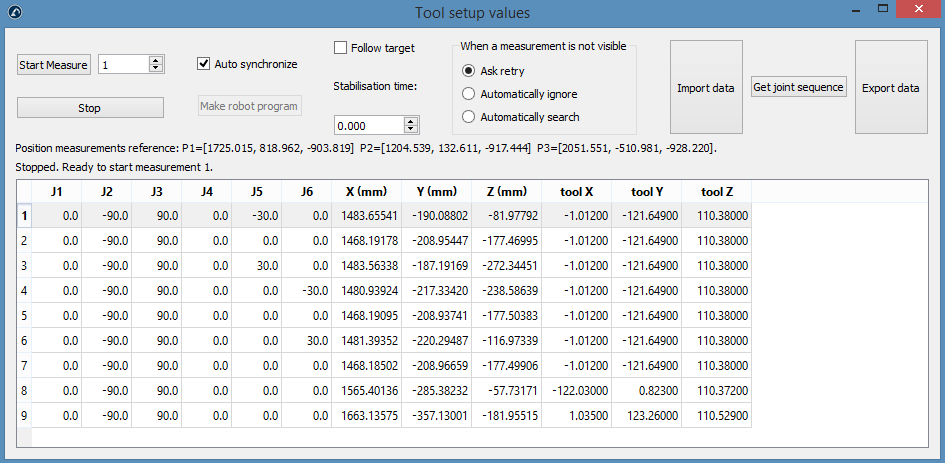
Measurements 1-6 can be performed anywhere in the tool flange as long as we measure the same target for the 6 measurements. After that, every TCP that we want to measure will add one measurement for the same TCP, in this case, we have 3 TCPs so 6+3=9 measurements in total. We can double click a measurement to continue measuring from that position.
Like the previous section: selectMeasurein theTool setupsection. The following window will open. SelectStart Measureand the robot will move sequentially through the planned measurements. Double click a measurement to continue measuring from that position.
The summary will show the calibrated TCPs when the procedure is completed. The definition of the TCP (in the following image “CalibTool 1”) will be updated automatically. If we did not select any TCP, we can add a new one (select “Program➔Add empty Tool”) and select “Recalculate”. A new window will appear and we must select the “id” of the tool depending on the order that we took the measurements. We can repeat the same procedure to update as many TCPs as we need (in this case 3 TCPs). The id of the tool will be automatically detected if the name of the tool ends with a number.