RoboDK API
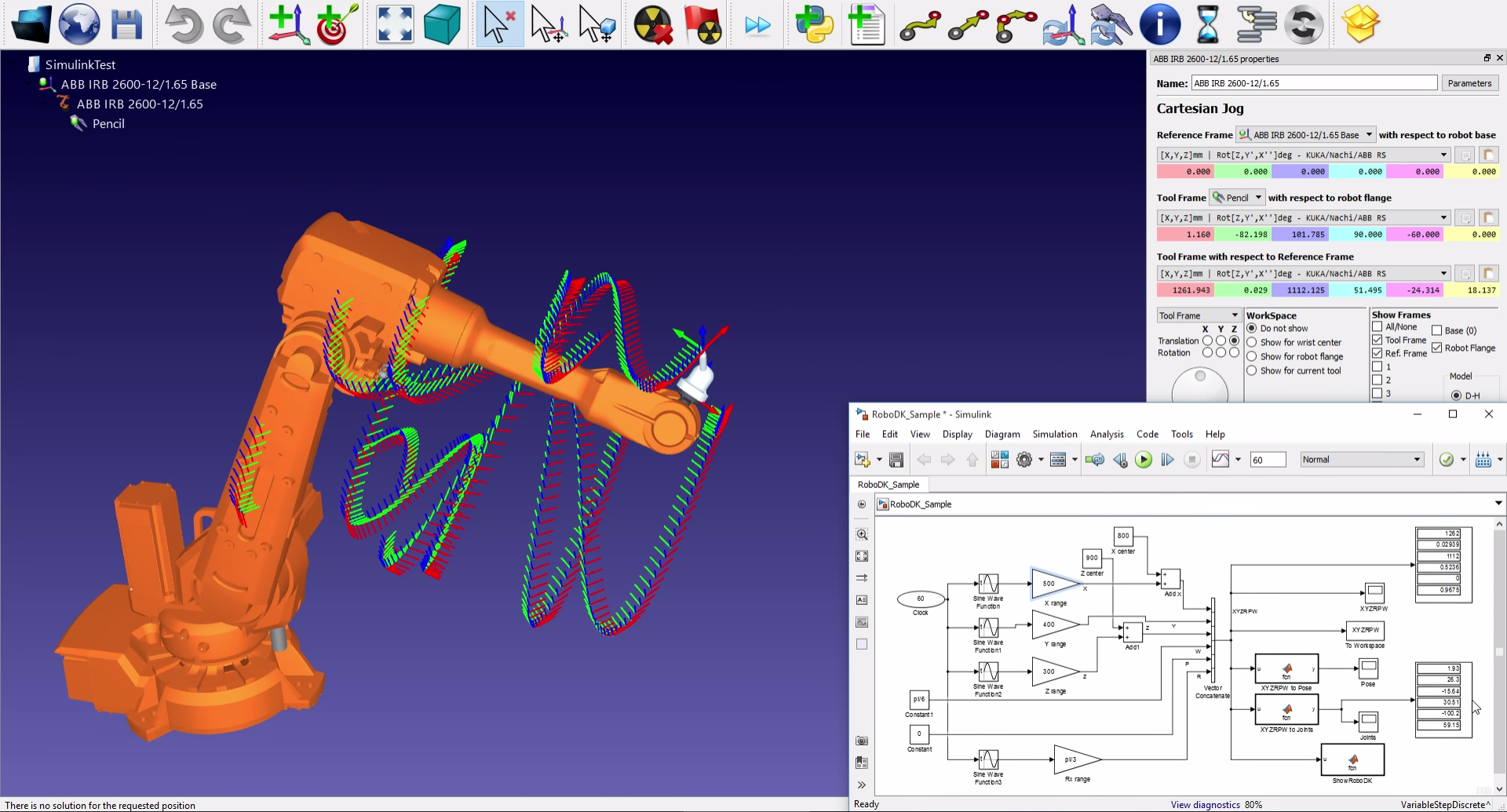
A Simulink project is available as an example. In the simulation, the robot is moved along a set of XYZ coordinates generated arbitrarily.
The following video shows the result of running the simulation:
https://www.youtube.com/watch?v=7DDBMwa0-Oc